
国際特許分類[B64C13/18]の内容
処理操作;運輸 (1,245,546) | 航空機;飛行;宇宙工学 (5,482) | 飛行機;ヘリコプタ (2,562) | 飛行操縦翼面,揚力増加フラップ,空気制動装置,またはスポイラを作動するための操縦系統または伝達系統 (300) | 入力装置 (189) | 自動的に作動されるもの,例.突風検出器に応答するもの (170) | 自動操縦装置を使用するもの (65)
国際特許分類[B64C13/18]に分類される特許
51 - 60 / 65
自動飛行制御装置、自動飛行制御方法及び自動飛行制御プログラム

【課題】 主な課題として、自動飛行制御装置全体の小型軽量化を図る。
【解決手段】 対気速度推定器7において、外乱推定器4では加速度計2により生成された機体加速度信号15とモータ制御信号16とに基づいた上で外乱推定信号17を発生し、風ベクトル予測器5では外乱推定器4により生成した外乱推定信号17と風洞試験などにより導出した機体固有の安定微係数に基づき、飛行中の機体が被る風ベクトルを推定することで風ベクトル推定信号18を発生し、対気速度目標値生成器6では風ベクトル予測器5により生成した風ベクトル推定信号18から対地速度目標信号20を生成する。自動飛行制御装置30内に対気速度センサが搭載されていない場合でも、対気速度推定器7を構成することで対気速度を考慮した対地速度目標値20が発生できるため、自動飛行制御装置30全体の小型軽量化が図れる。
(もっと読む)
航空機用地上衝突回避方法およびシステム

本発明は、航空機用の地上との衝突回避方法およびシステムに関する。このシステムは警告装置(3)と自動操縦装置(5)とからなり、この自動操縦装置(5)は、航空機用の最適勾配上昇指令を決定する手段(7)と、この最適勾配上昇指令を与えて地形起伏で得られた第1高度ゲインが、上記の地形起伏を越えるのに十分か否かを照合する手段(12)と、対応する高度ゲインが上記の地形起伏を越えるのに十分である少なくとも1つの飛行方向変更値の有無を発見する手段(11)と、上記の第1の高度ゲインが十分であれば、現在の飛行方向を維持するとの指令と共に最適勾配上昇指令を、そして上記の第1高度ゲインが不十分であれば、選択された飛行方向変更値に対応する飛行方向指令と共に、上記地形起伏を越えるのに十分な特定の上昇指令を航空機に与える手段(17、22)とを含む。 (もっと読む)
アクチュエータ制御装置
【課題】ジェネリック故障が発生したときであってもアクチュエータの動作を制御することができるアクチュエータ制御装置を提供する。
【解決手段】アクチュエータの動作を制御するための制御信号を前記アクチュエータの動作に対する指示信号に基づいて生成する通常時制御手段と、前記指示信号に基づいて前記制御信号を生成し前記通常時制御手段と比較して機能が少ないバックアップ用制御手段と、前記通常時制御手段の動作及び前記バックアップ用制御手段の動作を切り替える切替手段とを備え、前記バックアップ用制御手段は、前記通常時制御手段を構成する部品のうち故障の検証が最も困難な部品と比較して故障の検証が容易な部品のみで構成する。
(もっと読む)
航空機の縦揺れ(ピッチ)を制御する方法と装置
本発明はピッチング(縦揺れ)する航空機を操縦するための方法と装置に関する。この発明の装置(1)は制御負荷因子NZcを受け取る手段(4)と、航空機に与えられた負荷因子NZcgを予想する手段(11)と、航空機の制御面(7)を偏向するための手段(5)に対する制御指令を、少なくとも以下の主式を考慮することにより計算する手段(12)と、K1・NZc+K2・NZcg、この式中K1およびK2は2つの所定ゲイン値である、マッハ数を決定する手段(13)と、迎角を決定する手段(14)と、上記の迎角と基準値とを比較する手段(15)と、修正ゲイン値ΔK2を上記のマッハ数と迎角とにより決定する手段(16)とからなり、上記の迎角が上記の基準値より大きければ、この修正ゲイン値ΔK2が上記の計算手段(12)により行なわれる計算式のゲイン値K2と置き換えられる。 (もっと読む)
航空機の自動操縦が非作動の際の聞こえる警告方法と装置
本発明は、航空機の自動操縦装置(2)が非作動の際、聞こえる警告音を発生させる方法に関し、この方法はa) 第1所定値(d1)から第2所定値(d2)までに亘る時間、航空機のコックピットに第1音を伝達させ、b) 航空機のコックピットに第2音を伝達させることからなる。上記の発明は、又、航空機の自動操縦装置(2)の非作動をモニタする第1手段(10)と、コックピットに聞こえる警告音を発生させる手段(12)とからなる可聴警告装置(10)に関し、この装置(10)においては、第1手段が自動操縦装置の非作動を検知すると、第2手段は、第1の所定値(d1)から第2の所定値(d2)に亘る長さの第1音を発生させ、そして第2音を発生させるように構成されている。 (もっと読む)
動的システムを制御するためのシステムおよび方法
動的システムの速度および姿勢を制御するための制御システムは、所望の速度コマンドを受信し、オイラー角コマンドの形式で速度誤差を姿勢制御装置システムに出力するように構成された速度制御装置を備える。制御システムは、さらに、姿勢制御装置システムを含む。姿勢制御装置システムは、オイラー角コマンドを受信し、オイラー角コマンドに基づいて所望の四元数を出力するように構成された変換器を備える。姿勢制御装置システムは、さらに、所望の四元数および動的システムの推定速度および姿勢を示す推定四元数を受信し、動的システムに関連する姿勢誤差を出力するように構成された姿勢誤差生成器を備える。姿勢制御装置システムは、さらに、姿勢誤差を受信し、姿勢誤差に基づいて誤差コマンドを動的システムに出力するように構成された姿勢制御装置も備える。 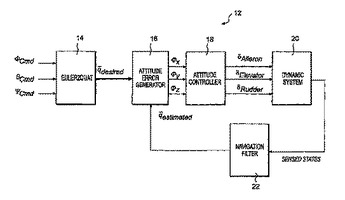 (もっと読む)
(もっと読む)
自動で不測事態に対応するジェネレータ
【課題】航空機が被る不測の事態に対して、航空機を自動で制御する制御システムを提供する。
【解決手段】自動航空機は、飛行制御システム及び自動で不測事態に対応するジェネレータを具え、自動で不測事態に対応するジェネレータは航空機が受ける不測の事態に応じて飛行制御システムを用いることによって、不測事態に対応した飛行機のルートを自動的に決定する。
(もっと読む)
飛行経路のバンク角生成方法および装置
【課題】 速度が変化しても、バンク角を高い応答性で制御することができる飛行経路のバンク角生成方法および装置を提供する。
【解決手段】 クロス・トラック偏差XTEとコース偏差CEと通過予想点とに基づいて、現在位置における航空機のバンク角φを算出する。バンク角φは、クロス・トラック偏差XTEおよびコース偏差CEという航空機の方位の偏差だけでなく、現在位置での飛行速度から求めた通過予想点をも考慮して算出するので、航空機の速度が変化しても通過予想点を通る旋回経路に対してオーバーシュートが生じることが防がれる。
(もっと読む)
航空機の旋回経路生成方法および装置
【課題】 操縦負荷を軽減し、最短距離で目標通過点を通る飛行経路を生成することができる航空機の旋回経路生成方法および装置を提供する。
【解決手段】 経路生成部31によって、所定の楕円経路ロジックを、一定のバンク角で楕円に近似した風下側旋回経路m1および風上側旋回経路m2を生成するために、インターフェイスとして風下側旋回経路m1に関しては、楕円の長軸a1および短軸b1を求め、最短距離で目標通過点を通過することができる経路情報を生成する。
(もっと読む)
無人ヘリコプタ及びその制御方法
【課題】 所定の散布領域で薬剤の散布を行う一方、所定の非散布領域で薬剤の散布を停止する無人ヘリコプタにおいて、非散布領域で栽培されている作物の倒伏を防ぐ。
【解決手段】 無人ヘリコプタ1の制御計算機10は、位置センサ2、速度センサ3及び高度センサ5を介して機体の位置、飛行速度及び飛行高度を検出し、記憶している非散布領域で要求される飛行速度及び飛行高度と比較し、所定時間後に非散布領域上空に機体が進入するか否か及び進入時の機体の飛行速度及び飛行高度が非散布領域上空で要求される飛行速度及び飛行高度を下回るか否かを判定する。そして、所定時間後に非散布領域上空に機体が進入しかつ進入時の飛行速度及び飛行高度が非散布領域上空で要求される飛行速度及び飛行高度を下回ると判定した場合に、要求される飛行速度及び飛行高度まで加速及び上昇させる。
(もっと読む)
51 - 60 / 65
[ Back to top ]