
国際特許分類[B65H63/06]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 薄板状または線条材料,例.シート,ウェブ,ケーブル,の取扱い (43,151) | フィラメント材料の巻き戻し、繰り出し、巻きあげ、巻きつけ、コイル形成、または堆積する際に使用する警報または安全装置,例.自動不良検出器,作動停止装置 (183) | 材料の移行中の異常の存在に応答するもの,例.異常時に材料を切離すためのもの (50)
国際特許分類[B65H63/06]に分類される特許
21 - 30 / 50
縦長の繊維供試品の特性表示方法及び装置
本方法は、縦方向に動かされる糸の特性表示に用いられる。糸の長手方向に沿う糸の特性の測定値が検出される。測定値から糸のパラメータの値が求められる。二次元直角座標系の象限を含む事象の場(3)が与えられ、この座標系の横軸(31)が縦方向における糸パラメータ値の範囲(L)を示し、その縦軸(32)が、目標値からのパラメータの偏差(ΔM)を示す。長手方向における糸パラメータの値及びその範囲(L)から、事象の場(3)における事象(71,72)の密度が求められる。事象の場(3)において糸本体が面(4として表示される。面(4)は、横軸(31)により、また縦軸(32)により、更に実質的に一定の事象密度に従う事象の場(3)内の線(41)により区画される。糸本体の表示は、浄化限界(6)を速やかにかつ経済的に規定するのを可能にする。 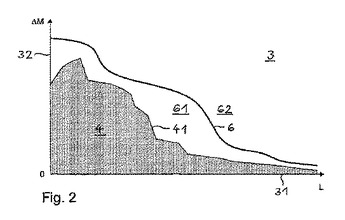 (もっと読む)
(もっと読む)
糸条の走行監視装置

【課題】本発明の目的は、目飛びなどの糸条の走行異常の検出用閾値を作業者の負担なく設定できる糸条の走行監視装置を提供することにある。
【解決手段】糸条の走行異常を判断する判断手段が、閾値検索をおこなう期間を設定する閾値検索時間設定部と、設定された閾値検索時間内に検出した糸条の一定送り量ごとのパルス数を閾値設定用パルス数として記憶する閾値設定パルス数記憶手段と、前記閾値設定用パルス数に基づいて走行異常を判断する閾値を設定する閾値設定手段と、を含む糸条の走行監視装置。
(もっと読む)
糸条の走行監視装置

【課題】本発明の目的は、目飛びなどの糸条の走行異常の発生を非接触で確実に検知することができる装置を提供することにある。
【解決手段】本発明の走行監視装置10は、繊維機械12で使用される針糸14aと下糸14bの両方の走行を監視する。各糸条14a,14bに対してセンサー16a,16bが設けられる。センサー16a,16bには、光源18a、18bと差動型空間フィルタ素子20a,20bが含まれる。第1センサー16aの差動出力と第2センサー16bの差動出力は、糸条14a,14bの走行の有無を判定するための信号処理回路26に入力され、処理される。
(もっと読む)
縦長の繊維供試品にある撚り継ぎ部の品質監視
縦長の繊維供試品例えば糸の欠陥除去限界を電子測定ヘッドに設定する方法において、供試品の少なくとも2つのパラメータに関係する第1の欠陥除去限界が、許される欠陥個所と許されない欠陥個所との間に規定され、線図に第1の欠陥除去曲線として示され、かつ測定ヘッドへ伝送される。供試品の少なくとも2つのパラメータに関係しかつ第1の欠陥除去限界とは異なる、供試品にある許される撚り継ぎ部と許されない撚り継ぎ部との間の第2の欠陥除去限界が、第1の欠陥除去限界から自動的に計算され、線図に第2の欠陥除去曲線として示されて、測定ヘッドへ伝送される。それにより撚り継ぎ部を除去するための異なる基準を示す撚り継ぎ部の欠陥除去限界が簡単に求められる。  (もっと読む)
(もっと読む)
糸巻取装置及びそれを備える自動ワインダ
【課題】糸欠陥検出器を通過する糸送り量を正確に算出して糸欠陥の検出精度を向上させることができる糸巻取装置を提供する。
【解決手段】巻取ユニット10は、パッケージ30に巻き取られる前の糸20を貯留するための糸プール部71と、糸プール部71に糸20を供給するために駆動されるサーボモータ55と、を備える。また、巻取ユニット10は、糸欠陥を検出するために糸プール部71の上流側に配置されるクリアラ15を備える。そして、巻取ユニット10は、糸プール部71より上流側の糸送り量に基づいて、クリアラ15を通過した太さムラの長さを計算する。
(もっと読む)
糸巻取機
【課題】糸の異常な走行状態を検出することが可能な糸巻取機を提供する。
【解決手段】自動ワインダは、パッケージ駆動モータ41と、周速検出部51と、糸速度センサ60と、ユニット制御部50と、を備える。パッケージ駆動モータ41は、糸20が巻き取られる巻取ボビン22を回転駆動する。周速検出部51は、パッケージ回転センサ43が検出した巻取ボビン22の回転数と、角度センサ44からの信号に基づき求められたパッケージ30の径と、に基づき、パッケージ30の周速を検出する。糸速度センサ60は、糸20の走行速度を検出する。ユニット制御部50は、周速検出部51が検出したパッケージ30の周速と糸速度センサ60が検出した糸速度とが予め設定された相関性を有するか否かを判定する。
(もっと読む)
糸を清浄化する方法及び装置
長手方向に沿って動かされる糸から欠陥を除去する方法において、糸の長手方向に沿う糸の特性の測定値が検出される。測定値から糸パラメータ(M)の値が求められる。糸パラメータ(M)及び長手方向における糸パラメータ値の範囲により形成される事象領域(6)が準備され、この事象領域が2つより多い範囲(71〜75)に分割され、これらの範囲のうち少なくとも1つの範囲(71,73〜75)が許容される事象を規定し、少なくとも1つの他の範囲(72)が許容されない事象を規定する。糸パラメータ(M)の値が長手方向におけるその範囲(L)と共に事象領域(6)において分類される。本発明は特に飾り糸の清浄化に用いられ、許容される別の範囲(73〜75)が所望の飾りの除去を防止する。 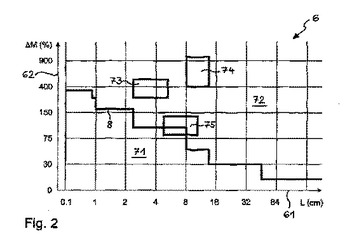 (もっと読む)
(もっと読む)
糸状供試物のパラメータを検出する装置
装置は測定間隙(2)を通って縦方向に動かされる糸状供試物(1)のパラメータを検出するために用いられる。測定間隙がパラメータを検出する第1の測定セル(3)及び第2の測定セル(5)を持っている。第1の測定セル(3)及び第2の測定セル(5)が、供試物(1)の縦方向に対して直角な面を持つ共通な平らな支持体(4)又は印刷配線板上に設けられている。それにより測定セル(3,5)を互いに正確に合わせることができ、装置が簡単であり、製造が安価である。  (もっと読む)
(もっと読む)
糸品質測定器及び糸巻取機
【課題】正確な糸欠点長さ評価及び周期ムラの検出が可能な糸品質測定器及び糸巻取機を提供する。
【解決手段】自動ワインダを構成するワインダユニット10は、クリアラ(糸品質測定器)15を備えている。このクリアラ15は、速度を変化させながら走行する紡績糸20の太さムラを検出し、糸の太さムラの検出を行っている。このとき、糸速度に応じてサンプリング周波数を変化させて検出信号のサンプリングを行っている。クリアラ15は、走行する糸の太さを検出する第1の糸ムラセンサ43と、CPU47と、を備える。CPU47は、外部の回転センサ42から得られる糸速度信号を受信し、当該糸速度信号に応じたサンプリング周波数で第1の糸ムラセンサ43の信号のサンプリングを行う。
(もっと読む)
糸条の走行監視装置
【課題】本発明の目的は、毛羽が存在しないかあるいはほとんど存在しないフィラメント糸の走行を監視することができる装置を提供することにある。
【解決手段】走行監視装置10は、走行する糸条12に光Lを照射する光源14と、糸条12に対して光源14とは反対方向に配置された差動型空間フィルタ素子16と、差動型空間フィルタ素子16の出力から糸条12の走行の有無を判断する信号処理回路18とを含む。本発明は糸条12の走行を監視するために、受光素子20a、20bのピッチを糸条12の凹凸の大きさと略同じとしている。
(もっと読む)
21 - 30 / 50
[ Back to top ]