
国際特許分類[B66C13/40]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | クレーン;クレーン,キヤプスタン,ウインチまたはタツクル用の荷物係合要素または装置 (4,090) | 他の構造上の特徴または細部 (1,024) | 制御方式または制御装置 (466) | 制御パルス伝達用装置の適用;遠隔制御装置の適用 (85)
国際特許分類[B66C13/40]の下位に属する分類
国際特許分類[B66C13/40]に分類される特許
1 - 10 / 80
タワークレーンの遠隔操作システム
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
車両搭載型クレーン装置
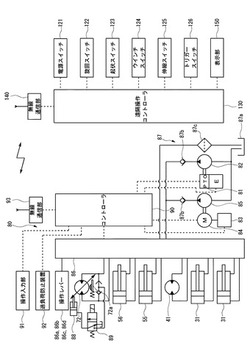
【課題】選択されている動力源をクレーン装置から離れた場所で確認可能とすることで、作業効率を向上させることのできる車両搭載型クレーン装置を提供する。
【解決手段】遠隔操作コントローラ130は、コントローラ90から送信された動力源に関するデータを受信し、受信したデータを表示部150に表示するようにしている。これにより、クレーン装置から離れた位置で使用者がいずれの動力源が選択されているかを確認することができるので、動力源の確認のための使用者の移動を無くすことができ、作業効率を向上させることが可能となる。
(もっと読む)
作業機

【課題】作業の途中でアイドリングストップ機能が発揮されてエンジンが停止しない作業機を提供することである。
【解決手段】作業機1は、エンジン529と、各種作業を行うための作業部(例えば、クレーン55)と、を有し、一定の期間ユーザから作業部を駆動するための操作入力が無い場合に、エンジンを停止するアイドリングストップ機能を有し、アイドリングストップ機能が作業部の状態によって制限される。
(もっと読む)
作業機
【課題】新たな入力部を設けずに、タイマ情報を設定することが可能な作業機を提供すること。
【解決手段】作業機1は、エンジン529を有する作業機本体5と、ユーザによって入力された操作を作業機本体5に送信可能な送信機3と、を有し、送信機3に一定期間操作の入力がなされなかった場合に、送信機3の電源を自動的にオフするオートパワーオフ機能と、オートパワーオフ機能に連動して、エンジン529を停止するエンジン停止機能と、オートパワーオフ機能が発揮されオートパワーオフが実行されるまでの時間の設定であるタイマ情報を設定するタイマ設定機能と、を有し、タイマ設定機能は、タイマ設定モードに切り替えることによってなされる。
(もっと読む)
作業機
【課題】送信機の電源のみをオフすることが可能な作業機を提供する。
【解決手段】作業機は、エンジンを有する作業機本体と、ユーザによって入力された操作を作業機本体に送信可能な送信機と、を有し、送信機は、送信機の電源をオフ可能な送信機電源スイッチを有し、送信機電源スイッチが短時間の間押圧される短押しによって、送信機の電源がオフし、送信機電源スイッチが短時間よりも長い一定時間の間押圧し続けられる長押しによって、送信機の電源のオフに加えてエンジンの停止が行われる。
(もっと読む)
車両
【課題】積降装置の回動動作を操作リモコン装置からの操作指令に基づいて制御する車両において、荷物の積み降ろしを行う際の作業性の向上を図りつつ、オペレータによる操作リモコン装置の誤操作を抑制できる車両を提供すること。
【解決手段】操作リモコン装置の接続先である第1及び第2接続端子が車両20の前後に配設される。よって、接続位置を変更することで、日光の当たり具合などに応じた位置(車両20の前後)で操作リモコン装置を操作できる。よって、積み降ろしを行う際の作業性の向上を図ることができる。この場合、操作リモコン装置から積降装置40の回動を指示した場合には、同じ操作であっても、操作リモコン装置の接続先に応じて、積降装置40の回動方向が反転されるので、車両20の前後で操作するオペレータによる操作リモコン装置の誤操作を抑制できる。
(もっと読む)
クレーン
【課題】 誤操作による作動を防止するようにしたクレーンを提供する。
【解決手段】 ペンダントスイッチ19と各駆動装置9、10、11との間に、ペンダントスイッチ19の音声入力部21から出力される音声信号を、予め登録してある駆動装置9、10、11の作動内容に対応した作動信号として出力する出力部22と、ペンダントスイッチ19の押釦13〜18から出力される作動信号とを比較し、同一の作動信号のときには、その作業信号を対応する駆動装置9、10、11に出力するようにした比較部23を備えた制御装置20を設け、ペンダントスイッチ19の複数ある押釦13〜18の中から作動内容に沿った押釦13〜18を押し込むと共に、作動内容に沿った音声を入力することで、作業者はクレーン1の作動内容を押釦13〜18と音声で確認しているので、誤操作が防止される。
(もっと読む)
遠隔操作装置及び操作装置
【課題】タッチパネルディスプレイを用いて移動体を動作させる場合に、操作部を確認でき、安全に移動体を操作することが可能な遠隔操作装置及び操作装置を提供することを目的とする。
【解決手段】本発明に係る遠隔操作装置1は、遠隔地における移動体を表示するモニタ部15、及び移動体を操作するための操作部7,8,9,10,11を表示するディスプレイと、操作部7,8,9,10,11に対するユーザの操作を検知する検知部とを有するタッチパネルディスプレイ4と、検知部にて検知されたユーザの操作に基づいて、移動体を動作させる操作信号を生成する制御部と、操作部7,8,9,10,11の表示位置に対応してタッチパネルディスプレイ4上に突出して設けられ、操作部7,8,9,10,11の機能に対応した形状を有する凸部24,25,26,32,33とを備える。
(もっと読む)
荷役機械の操作制御装置
【課題】駆動モータにサーボモータ等の位置制御可能モータを使用し、荷の移動量や位置決めをパルス制御により高精度で行う荷役機械の操作制御装置を提供すること。
【解決手段】位置制御可能な駆動モータ(サーボモータSM)と、該駆動モータを駆動する駆動アンプ(サーボアンプ3)と、コントローラ(2)と、操作装置を備え、操作装置は手動パルス発生器(12)又はパルス発生器の発生パルス数を操作する手動操作部と、デマンドスイッチ(23)を備え、コントローラはデマンドスイッチがON状態にある間は手動パルス発生器又は手動操作部で操作されるパルス発生器からのパルス信号を有効として駆動アンプに入力し、駆動アンプは入力されたパルス信号数に比例した速度と移動量になるように駆動モータを駆動する。
(もっと読む)
機器、遠隔操作装置、および遠隔操作システム
【課題】映像伝送の遅延状況を確実に把握でき、遠隔操作システムにおける操作の安全性を高めることを目的とする。
【解決手段】RTG16aは、ビデオカメラ24aと、ビデオカメラ24aによって取得された映像データをIP伝送に適した形式に変換するビデオエンコーダ27aと、ビデオエンコーダ27aによって変換された映像データを遠隔操作卓31aに送信するハブ20と、ビデオカメラ24aの撮影範囲に設けられ、遠隔操作卓31aからの指令に基づいて点灯/消灯するランプ29とを備え、遠隔操作卓31aは、RTG16aに対して、ランプ29を点灯/消灯させる旨の指令を出力し、該指令を出してから点灯/消灯したランプ29が映像に含まれた映像データを受信するまでの時間を求めることにより、映像データの遅延時間を検出する。
(もっと読む)
1 - 10 / 80
[ Back to top ]