
国際特許分類[E01B35/00]の内容
固定構造物 (153,614) | 道路,鉄道または橋りょうの建設 (13,779) | 軌道;軌道用の工具;あらゆる種類の鉄道建設用機械 (1,369) | 測定装置の軌道建設への応用 (100)
国際特許分類[E01B35/00]の下位に属する分類
軌間保持に用いるもの;横方向の整準に用いるもの;曲線の設計に用いるもの (10)
縦方向の不規則性の測定に用いるもの (24)
移動荷重下における軌道または軌道構成要素の移動,例.まくら木の沈下,軌間の拡張,を測定するもの (11)
国際特許分類[E01B35/00]に分類される特許
51 - 55 / 55
軌道位置を検出するための方法及び軌道のバラストをクリーニングするためのクリーニング機械

【課題】問題無く比較的簡単に実施でき且つ正確な軌道位置の再生が可能な、冒頭で述べた形式の方法若しくはクリーニング機械を提供する。
【解決手段】第1の測定弦(13)の第1のアーチ高さセンサ(16)によって測定されたアーチ高さ(fx)を、局所的な軌道ポイント(Px)に関する目標位置として後方の終端点(A2)を記録するための距離測定との関連においてメモリし、
ロ)第2の測定弦(14)の後方の終端点(B2)が局所的な軌道ポイント(Px)に到達した後で、第2の測定弦(14)に対応配置された第2のアーチ高さセンサ(17)がメモリされた前記アーチ高さ(fx)に相当する測定値延いては目標位置に達するまで前記の後方の終端点(B2)をずらすようにした。
(もっと読む)
ポイント、交差あるいは渡り線付交差ならびにレール継ぎ目および鉄道車輌による線路の不均質性の診断および状態の監視
本発明では、鉄道車輌がポイント、交差又は渡り線付交差ならびにレール継ぎ目又は線路の不均質性を越えて通過する際に、鉄道車輌の少なくとも一つの部材において、振動加速度が少なくとも一つの空間方向で測定されて保存される。ポイント、交差又は渡り線付交差、レール継ぎ目の通過、線路の不均質性を越える鉄道車輌の通過により鉄道車輌の部材において振動加速度が引き起こされる。更に、鉄道車輌の速度が測定されて保存され、また走行方向が確かめられて保存され、ポイント、交差又は渡り線付交差、レール継ぎ目、線路の不均質性の個所が確かめられて保存され、測定された振動加速度が所定の、特性的な限界値を越えているかどうか検査を実行し、所定の振動加速度の限界値を越える場合には、引き続きポイント、交差又は渡り線付交差の部材の状態、レール継ぎ目の状態、線路不均質性の更なる改善を行う。  (もっと読む)
(もっと読む)
レールの安全限界を判定するシステム及び方法
レールの安全限界を判定する方法、システム及び装置を開示する。レール安全限界を判定する第1の例示的方法は、連続溶接レールの一つの部分についての標的レール設定温度を特定することを含む。この方法はまた、連続溶接レールの前記部分についての長手方向応力を監視すること及びレール周囲温度を監視することも含む。この方法は更に、長手方向応力及びレール周囲温度に基づいて現在レール設定温度を求めることを含む。例示的方法によれば、連続溶接レールの前記部分の障害が発生したかを判定するために、現在レール設定温度と標的レール設定温度とが比較され、現在レール設定温度と標的レール設定温度との差が所定範囲内にある場合に、警報が伝えられる。レール安全限界の判定を提示するその他の方法、装置及びシステムも開示される。  (もっと読む)
(もっと読む)
鉄道線路を検査するためのシステムおよび方法
鉄道線路を検査するためのシステムおよび方法を開示する。システムは、レーザと、カメラと、プロセッサとを含む。レーザは、線路に近接して配置される。レーザは、鉄道線路を横断するように光線を放射し、光線が放射された鉄道線路の画像をカメラが記録する。プロセッサは、鉄道線路の様々な計測可能な状態を測定するために、画像を分析可能であるように設定する。システムは、GPS受信機、または位置データを測定するための距離計測装置を含む。システムにより測定できる計測可能な状態は、枕木間の間隔、レールに対する枕木の角度、枕木の表面のひびや不具合、固定部品の不足、固定部品のずれ、タイプレートの沈下、くぎの突出、レールの磨耗、レールの軌間、枕木に対するバラスト高さ、バラスト石の大きさ、レールの破損または分離を含む。システムは、鉄道線路のこれらの計測可能な状態を測定するための1つ以上のアルゴリズムを含む。  (もっと読む)
(もっと読む)
走行路の測定方法
本発明は、絶対座標系に対する軌道の実際の位置を含む軌道測定計画による軌道測定方法に関するものである。測定プラットホーム2は、慣性プラットホーム6を搭載し、軌道に沿って案内される。慣性プラットホーム6は、測定開始時に初期設定または較正され、かつ座標系に対して整合される。慣性プラットホーム6は、また測定プラットホーム2の走行中に座標系に対するその時々の測定プラットホーム位置を検出する。慣性プラットホーム6の位置データは、軌道近くに配置された固定点9,9´に基づいて周期的に点検され、座標系に対する偏差は、新たな較正または整合により修正される。 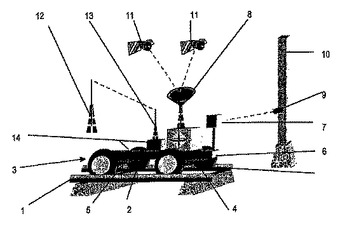 (もっと読む)
(もっと読む)
51 - 55 / 55
[ Back to top ]