
国際特許分類[F02D29/02]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 燃焼機関;熱ガスまたは燃焼生成物を利用する機関設備 (130,868) | 燃焼機関の制御 (58,935) | 機関の作動に不可欠な部品または補機以外の装置であって機関により駆動されるものに特有な制御,例.機関外からの信号による機関の制御 (10,434) | 車両を駆動する機関に特有のもの;可変ピッチのプロペラを駆動する機関に特有のもの (6,624)
国際特許分類[F02D29/02]に分類される特許
6,551 - 6,560 / 6,624
運動エネルギーおよび横加速度を使用する車両転覆防止モニタ
車両の転覆事象を検出する方法を提供する。車両の横運動エネルギーが、車両縦速度および車両横滑り角に応答して判定される。車両の横加速度が、測定される。転覆潜在力インデックスが、横運動エネルギーおよび横加速度に応答して判定される。転覆インデックスが、横加速度の係数によって転覆潜在力インデックスに重みを付けることによって判定される。比較を行って、転覆インデックスが所定の閾値を超えるかどうか判定する。  (もっと読む)
(もっと読む)
オールスピードガバナを搭載したエンジンのためのトルク速度制御方式
自動車(20)が、ディーゼルエンジン(22)と、自動車の作動に関連したデータ(CAN_TSC_OCM,CAN_TSC_OCM_SA11)を提供する1つ以上のソース(30,36)とを有し、これらソースは、エンジン(22)の外部に位置するが、エンジン(22)の燃料供給に潜在的に影響を及ぼす。エンジン制御システム(24)は、エンジン燃料供給(66)の制御のためにオールスピード調速方式(52)に従ってデータを処理してオールスピード調速燃料供給データ(MFGOV)を作成し、このオールスピード調速燃料供給データ(MFGOV)は、1つ以上のソースからのエンジン制御システム(24)へのデータ入力が、エンジン燃料供給(66)に影響を及ぼす必要がないことを示すと、エンジン燃料供給(66)をセットする。かかる1つ以上のソースからのデータ入力が、エンジン燃料供給(66)に影響を及ぼす必要のあることを示すと、このデータ入力は、エンジン燃料供給(66)をオールスピード調速方式(52)とは別の方式、特に、トルク速度制御方式(54)によって設定する。  (もっと読む)
(もっと読む)
車間距離制御を行う方法及び装置
本発明は、車間距離制御を行う方法及び装置に関し、これによれば、前記車両と前方走行車両との間の距離を表す距離変数の実際値(dact)が測定される。さらに、距離変数のための複数の重み付け値(gi)が、車両の運転状況及び/又は車両の周囲状況及び/又は運転者の運転動作を表す入力変数(xi)に従って決定され、前記重み付け値(gi)が、第1の計算ステップで論理的に結合されて、距離変数のための論理結合値(f)を形成する。距離変数のための設定値(dsetp)が論理結合値(f)から決定され、車両の制動手段及び/又は駆動手段が、距離変数の測定実際値(dact)が決定設定値(dsetp)をとるよう起動される。第1の計算ステップの後に第2の計算ステップが続き、ここで、論理結合値(f)が、予め定義された値の範囲に限定され、距離変数の設定値(dsetp)が、適宜限定される論理結合値(f)から決定される。 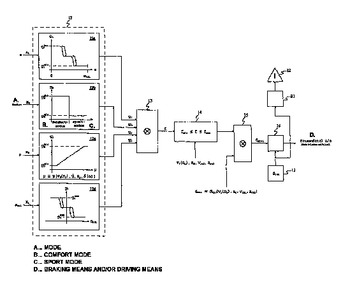 (もっと読む)
(もっと読む)
排気物質の低減のためのエンジン制御システム
一定速度に対しエンジンスピードを調節するステップと、エンジンの空燃比を維持するステップと、エンジンから、触媒(32)を収容する排気システム(16、18、40、65、80)を通して排気を流すステップと、触媒(32)の上流に配置された第1のセンサ(19)で第1の変数を監視するステップと、エンジン(12)の空燃比を第1の変数の関数として制御するステップと、を含む内燃機関(12)からのエミッションを制御する方法。1つの用途では、エンジン(12)は、発電及び推進を含む船舶用途用に構成される。  (もっと読む)
(もっと読む)
エンジンブレーキ制御圧力ストラテジー
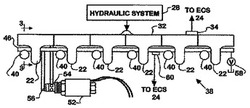
【課題】エンジンの燃料インジェクタの作動に使用される作動油すなわちオイルを使用できると同時に、ICPの使用によってアクチュエータに加えられる意図しない圧力がアクチュエータに加えられるという予期せぬ事態によりエンジンが損傷を受ける虞れから防護できるようにすることにある。
【解決手段】エンジンブレーキ中に排気ガスの流れを制御することによりエンジン(10)を制動するエンジンブレーキシステム(38)の燃料インジェクタ(229および油圧アクチュエータ(40)の両方の機能を遂行する油圧システム(28)を有するエンジン(10)。作動油の圧力は、ブレーキ制御圧力ストラテジーが非アクティブであるときに、噴射制御ストラテジーにより設定される。ブレーキ制御圧力ストラテジーがアクティブであるときは、作動油がアクチュエータ(40)に供給されるときにエンジン(10)の制動が行われる。
(もっと読む)
シリーズハイブリッド車両を作動させる方法
本発明は、オペレータの出力要求に応じた方法においてシリーズハイブリッド車両を作動させる一方で、車両のドライバビリティにおいて、エンジン効率を最大化し、障害を最小化する方法に関する。シリーズハイブリッド車両の運転者が出力要求をする場合、第2の動力源(12)は、エネルギー貯蔵デバイス(14)に貯蔵された第2のエネルギー、エンジン(16)によって生成された直接入力のエネルギー、または両方、のいずれかが供給されるが、それは車両の第2の貯蔵デバイスのみに貯蔵された利用可能な第2のエネルギー量、および車両速度との組み合わせに依存する。エンジンが第2のエネルギーを生成するために使用される間、エンジンが作動する動力効率レベルはまた、車両速度、車両の第2の貯蔵デバイスのみに貯蔵された利用可能な第2のエネルギー量、および車両速度との組み合わせに依存する。 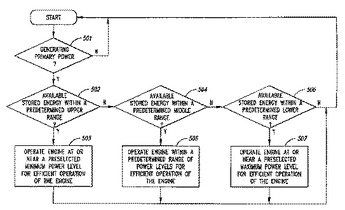 (もっと読む)
(もっと読む)
農業用または産業用の実用車のためのステアリングシステム、およびステアリングシステムを操作するための方法
本発明は、農業用または産業用の実用車のための、特にトラクタのためのステアリングシステムに関する。実用車(10)のアクスルの、好ましくは、フロントアクスル(20)の各半分に関して、電気的駆動装置(22、24)が備えられる。前記電気的駆動装置は、各アクスル半分に関連する少なくとも1つのホイール(26)を駆動することができる。電気的駆動装置(22、24)は、所定のトルクが、電気的駆動装置(22、24)から、駆動装置(22、24)が駆動するホイール(26)に伝達されることが可能であるような形で、制御されることが可能である。好ましくは、実用車(10)の機械的ドライブアクスルに関連する、特にリヤアクスル(12)に関連するホイール(26)が、実用車(10)の機械的駆動装置(16、18)によって駆動されることが可能である。また、本発明は、ステアリングシステムを操作するための方法にも関する。本発明の目的は、実用車(10)がカーブをうまく通り抜ける場合にも、牽引力が、電気的駆動装置(22、24)によって駆動されるホイール群(26)によって伝達されることを可能にし、それによって、特定のステアリング角において、前記ホイール群(26)の上で、特定の制動トルクが防止されるべきことである。実用車のステアリングをサポートするため、またはもたらすため、カーブの外側のホイールに伝達されるべきトルクは、カーブの内側のホイールに伝達されるべきトルクよりも大きい。 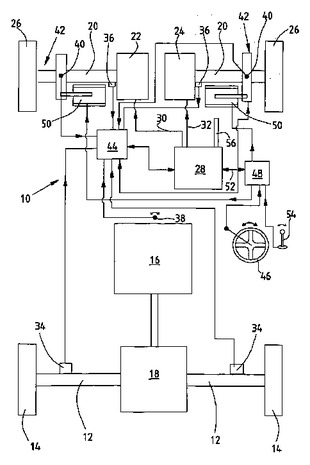 (もっと読む)
(もっと読む)
電力の排ガス駆動式発電機およびハイブリッド車を含む車両における高度補償
ハイブリッド車は、内燃機関、電気モーター、およびトランスミッションを備える。ターボチャージャーは、内燃機関と流体連通する。さらに、発電機は、ターボチャージャーに機械的に結合され、それにより、内燃機関からの排ガスにより駆動される。発電機は、電力をモーターおよび/または電池に供給すると同時に、内燃機関の高度補償を行い、高度および環境条件が変化したときも内燃機関の出力が同じ出力および効率になるようにできる。ターボチャージャーは、さらに、必要ならば、出力増大にも使用することができる。排ガス駆動式発電機システムを電池充電および/または電気アクセサリの電力供給のため従来の車両にも配備することができ、それによりオルタネータの代わりとすることができる。  (もっと読む)
(もっと読む)
自動車用運転支援システム
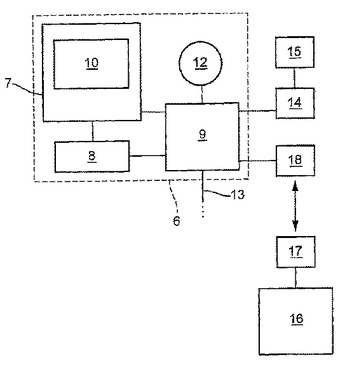
本発明は、少なくとも1つの駆動ユニットと、1つのステアリング装置と、1つのブレーキ装置とを有する、電子制御式駆動伝達系を備えた、自動車、特に多用途車に関する。自動車の運転を簡素化するために、表示装置(7)と、入力装置(8)と、制御システム(9)とを備えた運転支援システム(6)が設けられる。表示装置(7)は、車両の実際の向き及び実際の位置、及び車両の比較的近い周囲状況を、モニタ(10)に表示するよう適合される。入力装置(8)は、車両の所望の向き及び所望の位置を入力するよう適合される。制御システム(9)は、運転アルゴリズム(12)を処理するように適合され、駆動伝達系を作動させて、車両の周囲状況を考慮しつつ、車両をその実際の向き及び実際の位置からその所望の向き及び所望の位置に移動する。
 (もっと読む)
(もっと読む)
ハイブリッド車両の駆動部を制御する方法
内燃機関(10)及び電動モータ(24)を備える自動車の駆動部を制御する方法が開示されている。主変速装置(16)は、自動車の駆動軸(19)に接続された出力軸(18)と、内燃機関(10)に接続された入力軸(14)とを備える。電動モータ(24)は、少なくとも二つの変速段を含む中間変速装置(22)を介して、主変速装置(16)の入力軸(14)又は出力軸(16)に結合されている。本発明によれば、自動車は、自動車を停止状態から加速するために、最初は、もっぱら電動モータ(24)によって駆動され、中間変速装置(22)は、その最低変速段にある。内燃機関(10)は、中間変速装置におけるシフト操作の前に駆動機能を受け継ぐ。中間変速装置は、好ましくは、ドグクラッチ変速装置として具体化されている。本発明は、自動車、特に乗用車に適用される。  (もっと読む)
(もっと読む)
6,551 - 6,560 / 6,624
[ Back to top ]