
国際特許分類[F02D29/02]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 燃焼機関;熱ガスまたは燃焼生成物を利用する機関設備 (130,868) | 燃焼機関の制御 (58,935) | 機関の作動に不可欠な部品または補機以外の装置であって機関により駆動されるものに特有な制御,例.機関外からの信号による機関の制御 (10,434) | 車両を駆動する機関に特有のもの;可変ピッチのプロペラを駆動する機関に特有のもの (6,624)
国際特許分類[F02D29/02]に分類される特許
6,541 - 6,550 / 6,624
ハイブリッド車両の運転方法及び装置

【課題】ハイブリッド車両の運転方法、及びハイブリッド車両の少ない排気ガス排出を可能にする、この方法を実施する装置を提供する。
【解決手段】予め定められたトルク目標値(mifa)が、加算的に少なくとも一つの内燃機関(10)と少なくとも一つの電動モータ(40)によってもたらされる、ハイブリッド車両の運転方法において、第一のステップでは、内燃機関(10)のトルク寄与(MdB)が、排気ガスの少なくとも一つの特性値(NOx、HC、CO、粒子、Tabg)に依存して定められ、第二のステップでは、電動モータ(40)のトルク寄与(MdE)が、トルク目標値(mifa)と前記第一のステップで定められた内燃機関(10)のトルク寄与(MdB)との間の差に依存して定められる。
(もっと読む)
自動車の自動的縦制御方法および装置

間隔センサを有する、自動車の自動的な縦制御装置および方法が提案され、間隔センサは少なくとも、前を走行する車両に対する自己の、追従する車両の間隔および/または追従する車両に関する相対速度を測定する。測定値から、検出された、前を走行する車両が停止したかが定められるので、追従する車両は前を走行する車両の後方のある距離に停止される。前を走行する車両が再び始動したことが認識された場合には、追従する車両の運転者は始動操作装置を操作しなければならず、その場合に始動操作装置はブレーキペダルである。 (もっと読む)
連結車両の制御システム
本発明は、牽引車両及びトレーラーから構成される連結車両の制御システム(7)に関する。このトレーラーは、台枠を積み込み輸送しかつ積み降ろすようになっており、この台枠は支持具の上に載せることができ、この台枠の上にペイロードが搭載される。この制御システムにおいて、径路を計算する径路コンピュータ(8)が設けられ、この径路コンピュータは、台枠(4)を積み込むためにトレーラーを後ろ向きに台枠の下に導く径路を計算する。
第1の入力装置(10)が設けられ、それによって、台枠の実際の位置及び実際の方位が径路コンピュータ(8)に入力されることが可能であれば、そしてまた、第2の入力装置(11)が設けられ、それによって、トレーラーの実際の位置及び実際の方位が径路コンピュータ(8)に入力されことが可能であれば、特に信頼性の高いシステムが得られる。この場合、径路コンピュータ(8)は、台枠の実際の位置及び実際の方位から、トレーラーに対する参照位置及び参照方位、すなわちトレーラーが台枠を積み込むために台枠の下に位置する位置及び方位を計算するように構成され、かつ、径路コンピュータ(8)は、トレーラーの位置及び方位の実際値と参照値とから、トレーラーを後ろ向きに台枠の下に導く径路を計算するように構成される。
(もっと読む)
自動車の間隔制御システム
目標対象(18)および自己の車両(10)に関するデータを検出するためのセンサシステム(12)と,車両(10)の縦運動を制御するためのアクターシステム(16)と,目標対象(18)との間隔に関して定められた制御目標を維持するために,所定の介入限界(Lim1,Lim2)内においてアクターシステム(16)へ介入する制御器(14)と,制御目標が維持されない場合に,運転者に引受け要請を出力するための出力装置(20)とを有する,自動車のための間隔制御システムは,制御目標が維持されない対立状況を予測し,対立状況が発生する前に引受け要請(FUA)を作動させるための予測システム(22)を備えることを特徴としている。 (もっと読む)
自動車の駆動伝達系を操作する方法
1 自動車の駆動伝達系を操作する方法。
2.1. 駆動装置によって出力されたトルクが、トランスミッションを保護するために、制御装置によって制限されることがある。本発明の目的は、高過ぎる温度によりトランスミッションが損傷するのを保護する方法を提案することである。
2.2. 制御装置は、トランスミッションの温度情報に応じて、特性曲線(32)から最大許容パワー(Pmax)を決定する。制御装置は、駆動装置の回転速度を用いて、前記最大許容パワー(Pmax)から、駆動装置によって出力されたトルクがこれに制限される最大許容トルク(Mmax)を決定する。
2.3. 自動車内で使用する。
 (もっと読む)
(もっと読む)
作業車両及び作業車両のエンジン再始動制御方法
作業車両において、エンジンのアイドリングストップ後、オペレータによる操作レバーの操作に応答して、作業車両が不意に動き出さないようにしてエンジンを自動的に再始動する制御が行われる。エンジンのアイドリングストップ(S4)の後、ロックレバーがロック位置にされる(S5、YES)と、作業車両が動かないよう油圧回路が作動不能状態に制御され(S6)、その後に操作レバーに特定の操作が行われる(S7、YES)と、エンジン16が再始動される(S8)。エンジン再始動後、全操作レバーがニュートラル位置にある場合にのみ(S9、YES)、ロックレバーがロック解除される(S10、YES)と、油圧回路が漸次に通常の作動可能状態に回復して作業車両が動けるようになる(S11)。 (もっと読む)
惰性運転における車両駆動ユニットの運転方法および装置
【課題】惰性運転において燃料消費量を低減させる、車両駆動ユニットの運転方法および装置を提供する。
【解決手段】駆動ユニット(180)の惰性運転において、駆動ユニット(180)の出力変数が事前設定走行方式により設定される、車両駆動ユニット(180)の運転方法において、駆動ユニット(180)の惰性運転に対して少なくとも2つの事前設定走行方式が設定され、惰性運転において、事前設定走行方式のいずれかが走行状況の関数として選択される。
(もっと読む)
内燃機関を自動的にスタートおよびストップさせる方法
本発明は、内燃機関を自動的にスタートおよびストップさせる方法に関する。内燃機関(1)に関するストップモードの解放が、自動車の内室(9)の温度と、ドライバによって所望される目標温度との温度差に依存する期間に依存して行われる。 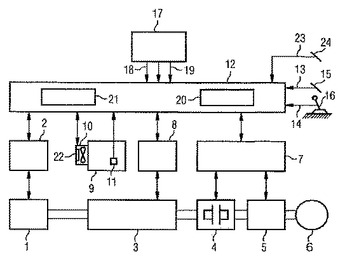 (もっと読む)
(もっと読む)
情報処理装置、及びハイブリッド車両
【課題】 データ精度の低下を抑制しつつ、効率よく走行データを圧縮すること。
【解決手段】 走行データ処理部11は、車両が稼動している間、所定のサンプリングレート(例えば、100[msec]、500[msec]、・・・など)で走行データ(車速、位置情報、時刻など)をサンプリングして一時記憶装置に記憶する。走行終了時に、収集した走行データを分析し、車両が発進してから停止するまでの間の走行データを圧縮の単位とする。走行データの圧縮は、サンプリングした走行データのうち、一定車速に到達した時点(地点)、及び車速の変化が変曲点となる時点で取得した走行データを抽出することにより行う。そして、走行データ処理部11は、抽出した走行データを出力し走行データ記憶部15に記憶する。
(もっと読む)
建設機械
建設機械1のコントローラ102は、アイドルストップ制御機能を作業や安全の支障にならないように制御する。コントローラ102は、ユーザに操作される選択スイッチ30に応答してアイドルストップ制御機能の有効と無効を切替え、アイドルストップ制御機能が有効なときには車内外の警報/表示器33,34,37,38に表示を出力する。コントローラ102は、アイドルストップ制御によりエンジン101を自動停止する前に、車内外の警報/表示器33,34,37,38に警報を出力する。コントローラ102は、自動停止したエンジン101を再起動する前にも、車内外の警報/表示器33,34,37,38に警報を出力し、そして、ロックレバー23により油圧回路がロックされていない限り、エンジン101を再起動しない。 (もっと読む)
6,541 - 6,550 / 6,624
[ Back to top ]