
国際特許分類[F16H48/30]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 差動伝動装置 (1,484) | 差動動作を抑制または差動動作に影響を及ぼすための装置,例.固定装置 (691) | 外部から作動可能な固定装置を用いるもの (239)
国際特許分類[F16H48/30]に分類される特許
1 - 10 / 239
車両姿勢制御装置
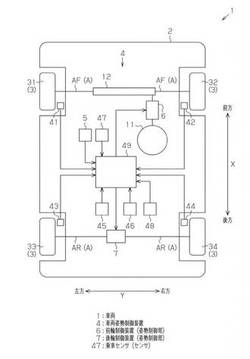
【課題】所定の乗車位置における乗り心地の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7を備える。前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1に乗っている乗員の数である乗員数および車両1に乗っている乗員の位置である乗車位置を検出する乗車センサ47の出力に基づいて車両1の姿勢を制御する。
(もっと読む)
車両旋回挙動制御装置

【課題】ステア特性に影響を与える左右輪間に作用させるべき差動制限力を調整する差動制限手段と、車輪への制動力を調整するブレーキ装置とを協調制御することで、車両の走行状態に関わらず、良好な車両の姿勢制御を行う。
【解決手段】前後左右輪を備えた車両1に付加すべき要求ヨーモーメント演算手段41、前輪または後輪の左右輪に対する駆動力を調整する第1のヨー運動調整手段、前輪または後輪の少なくとも一方における左右輪に対するブレーキ装置の制動力を調整する第2のヨー運動調整手段33、車両の旋回時の旋回内輪スリップ検出手段43、ヨー運動調整手段を制御する車両の旋回状態制御手段44を有し、旋回状態制御手段は、スリップ検出手段の検出結果に基づき、第1のヨー運動調整手段による駆動力差の調整と第2のヨー運動調整手段による駆動力差の調整を行い、要求ヨーモーメントへの第1および第2のヨー運動調整手段の寄与率を制御する。
(もっと読む)
駆動力配分機構の制御装置
【課題】入力された駆動力を二軸に配分して伝達する駆動力配分機構の耐久性を向上させる。
【解決手段】入力されたトルクを互いに独立して回転できる二軸に分配するとともに、一方の軸から他方の軸にトルクを移動させるように構成された駆動力配分機構の制御装置において、前記駆動力配分機構に入力されるトルクを求める入力トルク算出手段(ステップS1)と、その入力トルク算出手段(ステップS1)で求められた入力トルクに基づいて、前記二軸間で移動させる移動トルクの上限値を求めるとともに、前記二軸間で移動させるトルクをその上限値以下に規制する移動トルク制限手段(ステップS3)とを備えている。
(もっと読む)
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
差動制限機構の制御装置
【課題】要求されるLSD(差動制限機構)の作動と、LSDの作動により生じる操舵反力変化に起因して発生する操舵違和感の抑制とをバランスさせることができるようにした、差動制限機構の制御装置を提供する。
【解決手段】車両の左右輪の差動を制限する差動制限機構5と、差動制限機構5を制御する制御手段10とを有する車両において、車両の操舵角を検出する操舵角検出手段8aと、車両の操舵トルクを検出する操舵トルク検出手段9と、を有し、制御手段10は、操舵角検出手段8aにより検出した操舵角の方向と、操舵トルク検出手段9により検出した操舵トルクの方向とが異なった際に、差動制限機構5の制御量を減少させる。
(もっと読む)
差動制限機構の制御装置
【課題】差動制限機構の制御装置に関し、差動制限機構の作動時に発生する操舵反力変化を操舵アシスト力によって抑制するものにおいて、操舵アシスト力を付与できない操舵アシスト側のインタロック作動時にも操舵反力変化を抑制することができるようする。
【解決手段】車両の左右輪4FR,4FLの差動を制限する差動制限機構5と、車両の操舵に対しアシストトルクを付加するパワーステアリング機構8とを有し、差動制限機構5の動作に応じて、パワーステアリング機構8の制御量を増減制御する制御手段10とを有すると共に、パワーステアリング機構8のインタロックの作動を検出するインタロック作動検出手段を有し、制御手段10は、インタロック作動検出手段によりインタロックの作動を検出した際には、差動制限機構5の制御量を減少させる。
(もっと読む)
伝達比可変装置及び車両用操舵装置
【課題】ロック時の衝撃トルクによるロックホルダずれを抑制できる伝達比可変装置及び車両用操舵装置を提供する。
【解決手段】キー機構71は、シャフト凹部72、ホルダ凹部73及びこれらシャフト凹部72とホルダ凹部73とを連通するようにトルクリミットリング57に形成された連通孔74により区画される収容室75内に収容される係合部材76を備えた。このシャフト凹部72を、モータシャフト30とロックホルダ52とが互いに相対回転可能となるように係合部材76を収容可能に形成するとともに、ホルダ凹部73を、モータシャフト30とロックホルダ52とが相対回転不能となるように係合部材76の一部がシャフト凹部72内に突出した状態で該係合部材76を収容可能に形成した。そして、係合部材76を、モータシャフト30とロックホルダ52とが相対回転可能となる位置と相対回転不能となる位置との間で移動可能に構成した。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保し、旋回性能を改善することができる電気自動車およびプログラムを提供する。
【解決手段】この電気自動車1は、前輪側の左右輪に第1の差動装置4fを介して制駆動力を伝達する第1の電気モータ3fと、後輪側の左右輪に第2の差動装置4rを介して制駆動力を伝達する第2の電気モータ3rと、第1および第2の電気モータ3f、3rの制駆動力を制御する制御部とを備え、第1および第2の差動装置4f、4rは、制御部により左右への動力配分率が制御可能な構成を有する。
(もっと読む)
駆動制御装置
【課題】 車両の走行状態に応じて適切に旋回することができる駆動制御装置を提供すること。
【解決手段】 第1規範ヨーレイト算出手段8a4によって、横加速度センサ32で検出された加速度に応じて第1規範ヨーレイトが算出され、第2規範ヨーレイト算出手段8a5によって、横加速度推定手段8a3で推定した加速度に応じて第2規範ヨーレイトが算出される。横加速度推定手段8a3は、操舵角と走行速度に基づいて加速度を推定する。走行速度と操舵角とに応じて規範ヨーレイト選択手段8a6によって選択された規範ヨーレイトと走行速度とに基づいて、基準差回転算出手段8a7によって基準差回転が算出される。制御手段8a1によって、実差回転と基準差回転との偏差に応じて差回転設定機構Tを制御する。
(もっと読む)
駆動力制御装置
【課題】差動制限または/およびトルク差制御が可能な軽量かつコンパクトな低コストの駆動力制御装置を提供する。
【解決手段】ブレーキ41およびクラッチ42を選択的に摩擦係合させてトランスファ出力軸13,14の間の差動制限または/およびトルク配分制御を実行する駆動力制御装置で、アクチュエータ43と、これにより駆動される回転の中心軸線から離れた第1、第2駆動側カム部を有する駆動側カムプレート51と、第1転動体54を介して駆動側カムプレート51の第1駆動側カム部により駆動されるとき中心軸線方向に変位する第1の従動側カムプレート52と、第2転動体55を介して駆動側カムプレート51の第2駆動側カム部により駆動されるとき中心軸線方向に変位する第2の従動側カムプレート53と、を備え、第1および第2の従動側カムプレート52,53によって摩擦係合要素41,42の作動状態を切り替えるように構成されている。
(もっと読む)
1 - 10 / 239
[ Back to top ]