
国際特許分類[G01C11/02]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 写真計量または映像計量,例.ステレオ法を用いた測量;写真測量 (242) | 写真計量または写真測量に特に適合する写真撮影装置,例.写真の重なりを制御するもの (38)
国際特許分類[G01C11/02]に分類される特許
1 - 10 / 38
線路周辺設備空間情報取得システム
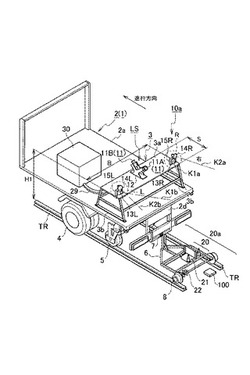
【課題】INS部、GPS部等を備えないで昼夜を問わず線路周辺設備のレーザデータに対応する移動車輌の位置及び移動距離を算出させることができる線路周辺設備空間情報取得システムを提供する。
【解決手段】軌陸車本体2に架台3を設け、車上子・エンコーダ用台車20aを接続する。架台3に下方スキャン用レーザ11Aと上方スキャン用レーザ11BをV字状に固定し、左の角部に、左カメラ・照明部Lを固定し、かつ右の角部に右カメラ・照明部Rを固定し、コントローラ部30が、その内部タイマの時刻をレーザスキャナ11A,11Bに設定して、これらのレーザスキャナ11A,11Bからのレーザエンコーダデータを50Hzで収集し、両方のカメラ13L,13Rからの赤外線画像データを30Hzで取得し、200Hzの周期で、エンコーダ22からのエンコーダパルス、ATS検出信号を取得して内部タイマの時刻をそれぞれに付加してメモリに記憶する。
(もっと読む)
捜索目標位置特定装置及び捜索目標位置特定方法並びにコンピュータプログラム

【課題】航空機から捜索した起伏の多い地表面の目標物を精度良く測定し、位置特定の精度を向上させることを可能にすること。
【解決手段】目標物3の位置を水平面に投影した位置は、捜索目標物3が水平面から高さHの位置に有るので、カメラ2から見て捜索目標物3の方向に延ばした直線L1と、水平面との交点からR1だけずれた位置となる。しかし、実際には、地表面4は高度情報を含む3次元地勢データのメッシュで区切られた階段状の高度7であるため、この位置は符号R1' で示す位置となり、誤差が生じている。そこで、捜索目標物3に近接する既知の位置情報を有するランドマーク5とランドマーク6との間のカメラ2から見た方向角を計測することにより、ランドマーク5及びランドマーク6の高度を各々計測し、この高度情報を用いて目標物3の高度情報を算出し、捜索目標物3の方向に延ばした直線との交点を求めて捜索目標物3の位置を特定する。
(もっと読む)
写真計測用画像処理装置、それを用いた現場記録システム、荷物記録システム並びにレーザ加工システム
【課題】1台のカメラを用いて建築構造物等の写真計測が行え、建造過程の品質管理の向上を図る写真計測用画像処理装置の提供。
【解決手段】1台のカメラと、計測用治具と、表示手段と入力手段と演算手段と記憶手段とデータ転送手段を有する情報演算端末を備えた写真計測用画像処理装置において、計測用治具は矩形頂点を形成する4点の写真計測用基準点を有する方形平板等の構造とされ被計測対象に隣接配設され、情報演算端末は記憶手段が予め算出されたカメラの内部標定要素を記憶し、データ転送手段がカメラを用いて撮影された被計測対象および計測用治具をカメラ視野内に含む1枚の画像を取り込み、演算手段が取り込んだ1枚の画像からカメラ画像と実座標の関連情報と外部標定要素を算出し、画像上の少なくとも2点以上の選択されたポイントの計測用治具のなす平面、その平行平面、及びそれらと既知の交角をもつ平面上での2次元座標位置や距離を計測する。
(もっと読む)
飛翔体位置測定装置
【課題】 鳥類等の飛翔体の3次元位置を簡易に測定する。
【解決手段】 本発明の飛翔体位置測定装置1は、超広角レンズよりも焦点距離の長いレンズを装着したカメラ10,11を用い、カメラ10,11を10m以下の近距離で配置した構成である。焦点距離の長いレンズを装着しているため、100m以上離れて飛行する飛翔体を近距離で配置した2台のカメラ10,11でステレオ撮影し、その3次元位置情報を得ることが可能である。カメラ10,11間の間隔が10m以下の近距離であるため、山間部等においてもカメラの設置作業が容易であると共に、数m四方から十数m四方の設置場所の範囲内に複数台のカメラを設置できることから、作業人員も従来よりも少なくすることができる。
(もっと読む)
形状測定装置およびプログラム
【課題】重複画像における誤対応点を自動判定することで、三次元形状の測定に必要な初期値を始めとする測定値を自動で取得する。
【解決手段】
形状測定装置1は、重複撮影領域で測定対象物18を撮影する撮影部2〜9と、撮影部2〜9によって撮影された重複画像における測定対象物18の特徴点の位置を対応付ける特徴点対応付部21と、特徴点対応付部で対応付けた特徴点同士を線分で結び三角形網を形成する三角形網形成部23と、三角形網形成部23で形成した三角形網の辺長、面積、角度の少なくとも一つに基づき、誤対応点を判定する誤対応点判定部24と、誤対応点判定部24で誤対応点と判定された点を除いた特徴点の位置等に基づき、測定対象物18のの三次元形状を求める三次元形状測定部25とを備える。
(もっと読む)
位置計測装置、認識対象物およびプログラム
【課題】対象物に備えられた点光源および基準部材を撮影し、撮影された画像から点光源および基準部材の位置を高精度に計測することで、対象物の位置計測を高精度に行うことができる位置計測装置等を提供する。
【解決手段】対象物100に配置する基準部材16の像を撮影するカメラ30と、カメラ30により撮影された基準部材16の像から3点以上の第1基準点の位置および1点以上の第2基準点の位置を導出し、第1基準点および第2基準点の対象物100における位置関係を取得し、画像中での第1基準点および第2基準点の位置と対象物100上での第1基準点および第2基準点の位置関係より対象物100の位置を求める演算装置40と、を備えることを特徴とする位置計測装置300。
(もっと読む)
位置計測装置
【課題】撮像距離に影響されず、画像中の形状が変化することのないランドマークを用いるとともに、周囲の明るさの影響を受けにくい位置検出処理を行う位置計測装置を得る。
【解決手段】撮像距離によらず相似形に撮像される放射状模様を有し、位置を計測する計測対象物に離間して付設される複数のランドマーク9と、前記複数のランドマーク9を同一画像に撮像するように設置固定されたカメラ8と、前記カメラ8の撮像画像から前記複数のランドマーク9の位置を検出し、該画像中の複数のランドマーク9の位置を用いて前記計測対象物であるスプレッダ5の位置を演算によって求める画像処理部7とを備える。
(もっと読む)
位置誤差補正装置及び位置誤差補正プログラム
【課題】衛星画像に関する光学マルチセンサデータのシステム補正処理から幾何モデルパラメータ調整までの一連の処理を再帰的に自動で行う装置を提供する。
【解決手段】画像処理部10は、光学マルチセンサデータ、人工衛星の軌道・姿勢データ、幾何モデルパラメータに基づき、複数帯域の衛星画像データを作成する。バンド間位置誤差算出部20は、所定の帯域の衛星画像データを基準画像データとし、基準画像データ以外の各帯域の衛星画像データを参照画像データとし、基準画像データと各参照画像データとの間の位置誤差をバンド間位置誤差として参照画像データごとに算出する。幾何モデルパラメータ算出部40は、各バンド間位置誤差に基づき、新たな幾何モデルパラメータを算出する。画像処理部10は、前記光学マルチセンサデータ、前記軌道・姿勢衛星データ、新たに算出された幾何モデルパラメータとから新たに複数帯域の衛星画像データを作成する。
(もっと読む)
市街景観画像情報較正システム
【課題】 実画像を用いた都市景観3次元動画を提供するシステムに対して実画像取得にともなう位置情報、撮影方向等のメタデータの精度向上手段を提供する。
【解決手段】 都市市街を地上から高密度に多方向から撮影した画像をデータベース化し、任意の都市の位置に対して任意の視点経路と視線方向に対応した画像をデータベースから検索して、検索した画像を実際の視点との視差に対応してモーフィング処理により連続した滑らかな3次元動画に生成することを特徴とする都市景観3次元動画システムにおいて、生成する3次元動画の品質を向上させるの区的で、実画像取得にともなう位置情報、撮影方向等のメタデータの精度向上を行う手段を提供する。
(もっと読む)
縦に繋がれたカメラ及び/又は距離測定特徴を含んでいる大領域画像を詳細にとらえるシステム及び方法
システム及び方法は、大領域物体又は大領域に関する画像の獲得に関係して開示されている。1つの例示的な実施形態においては、1つ又はそれ以上の第1画像獲得装置を含む第1システムを介して、第1領域を描いている概観画像を得る又は獲得するとともに、複数の画像獲得装置を含む第2システムを介して、画像軸に沿って互いに関係しているが如く特徴付けられている詳細画像を得る又は獲得する、方法が提供されている。さらには、詳細画像は第1領域の部分集合である第2領域を描いて良く、それらは画像軸に対し平行な片に配置されて良く、そしてそれらは第1領域の対応している部分より高解像を有して良い。 (もっと読む)
1 - 10 / 38
[ Back to top ]