
国際特許分類[G01C21/12]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 速度または加速度の測定を使用するもの (157) | 航行体上で実施するもの;推測航法 (121)
国際特許分類[G01C21/12]の下位に属する分類
国際特許分類[G01C21/12]に分類される特許
41 - 45 / 45
ナビゲーション装置
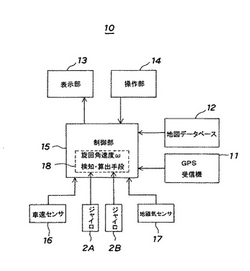
【目的】自動二輪車などの旋回時のロール角が大きな移動体の位置を精度良く求めるこ
とができ、ジャイロセンサの学習機能の構築が容易なカーナビゲーション装置を提供する
。
【構成】ナビゲーション装置10は、移動体1に設置されるとともにジャイロセンサに
よって前記移動体1の旋回角速度ωを検知・算出する旋回角速度検知・算出手段18を備
えており、特に、この旋回角速度検知・算出手段18は、移動体1の正立状態における上
下方向(X軸方向)及び前後方向(Y軸方向)に対して左右方向(Z軸方向)において、
上下方向のX軸に対して互いに逆方向に同一角度θ1、θ2(θ1=θ2=θ0)傾けて
左右対称に設置された同感度の2つのジャイロセンサ2A、2Bと、2つのジャイロセン
サ2A、2Bのセンサ出力回路9、9と、センサ出力回路9、9の出力信号の変化x1、
x2から移動体1の旋回角速度ωを算出する演算手段と、を備える構成である。
(もっと読む)
加速度計およびGPS受信機を用いた発射体の誘導
発射体には、その本体の直交座標系があることを特徴とする、ジャイロを持たない発射体誘導システム。この発射体には、3軸の加速度計があり、x、y、およびz軸に沿って測定したx、y、およびz加速度データを提供する。GPSアンテナおよび受信機手段は、機内に搭載したGPSからの位置および速度データを、地球の基準航行座標系で提供する。コンピュータおよびプログラム手段は、時間インデックス付きのGPS位置データおよびGPS速度データを記憶し、またそれにアクセスし、さらに、x、y、およびz軸加速度データを、本体座標系から航行座標系へと変換する。プログラム手段は、対応する時間インデックス付き加速度データと、GPS速度データおよび位置データとに応答し、推定した発射体のロール角、ピッチ角、およびヨー角を、最適なスムージング技術を用いて、現在位置の時間インデックスが繰り返されるたびに、その局所レベルに関して計算し、発射体を所定の位置に誘導する飛行制御システムに出力する。 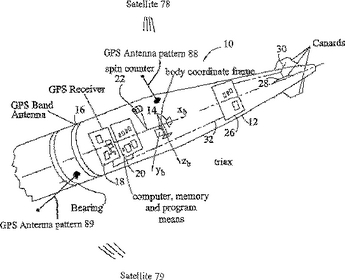 (もっと読む)
(もっと読む)
ナビゲーション装置

【課題】 道路の傾斜角を正確に算出して車両の現在位置を補正する動作を実行可能な「ナビゲーション装置」を提供する。
【解決手段】 車両の走行速度及び走行距離を検出する車速センサ103と、車両の進行方向の加速度を測定する加速度センサ101と、ナビゲーションコントローラ115とを有し、ナビゲーションコントローラ115が、車速センサ103から検出される走行速度に基づいて車速加速度Gpを算出し、車速加速度Gpと加速度センサ101で測定されたセンサ加速度Gcとに基づいて車両の傾斜角θを算出し、その後、車速加速度Gpとセンサ加速度Gcと傾斜角θとに基づいて車両の現在位置を補正することを特徴とするナビゲーション装置を構成する。
(もっと読む)
イメージ拡張型の慣性航行システム(IAINS)および方法
輸送手段(10)上に搭載されたイメージ拡張型の慣性航行システム(LAWS)は、航行状態ベクトルを推定するように構成された慣性航行システム(INS)と、イメージャーの視野(x,y,z)を通過する地形特徴に関連するピクセル信号を出力するように構成されたイメージャー(12)とを含む。システム(IAINS)は、慣性航行システム(INS)とイメージャー(12)とに動作可能に接続された処理装置をさらに含む。処理装置は、特徴ピクセル信号に関連する所与の画像フレームに対して、イメージャーからイメージャーの視野を通過する1つまたは複数の地形特徴の中心までの距離を感知するように構成される。処理装置はまた、地形特徴がイメージャーの視野を通過するにつれて、各地形特徴を追跡するようにも構成される。処理装置はさらに、追跡された地形特徴に関する慣性航行システム(INS)の計算されたNED(前、右、下)座標位置情報に基づき、慣性航行システム(INS)の航行状態ベクトルを更新するように構成される。 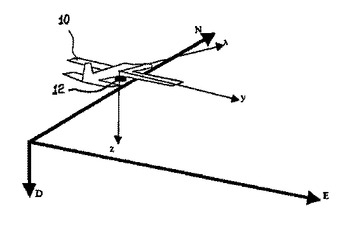 (もっと読む)
(もっと読む)
慣性システム用の入力された位置合わせデータを使用する慣性GPSナビゲーションシステム
慣性(「INS」)/GPS受信機は、それが、始動中に動いているときには、入力された位置合わせデータを使用してINSサブシステムの位置合わせを決定する。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、及び、受信機が搭載されている乗物と、慣性測定ユニット(「IMU」)の加速度計及びジャイロスコープに関連する慣性測定基準、または、ボディ、フレームとの間の既知のまたは既定の角度関係から決定される。制約をもたらすパラメータ化された表面情報は、受信機を収容している乗物が移動している表面の配向とすることができる。受信機は、初期のGPS位置を使用して、パラメータ化された表面上、したがって、既知の表面の配向上の乗物の位置を決定する。受信機は、次に、関連するGPS速度ベクトルを使用して、表面上の乗物のロール、ピッチ、及び方位を決定する。その後、受信機は、乗物の計算されたロール、ピッチ、方位、及び、乗物とIMUボディフレームとの間の既知のまたは既定の角度関係を使用して、IMUボディフレームを受信機によって使用される計算上のフレームまたは基準フレームに関連付ける回転行列を決定する。 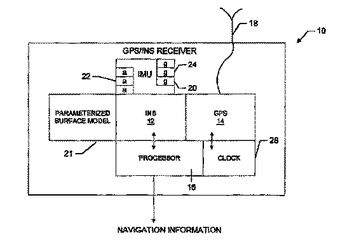 (もっと読む)
(もっと読む)
41 - 45 / 45
[ Back to top ]