
国際特許分類[G01C21/12]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 速度または加速度の測定を使用するもの (157) | 航行体上で実施するもの;推測航法 (121)
国際特許分類[G01C21/12]の下位に属する分類
国際特許分類[G01C21/12]に分類される特許
31 - 40 / 45
慣性航法装置およびその誤差補正方法
【課題】磁気方位センサの誤差や荒天時の風などの外乱に左右されることなく、より安定して姿勢/方位の初期データの精度を向上させることができる慣性航法装置を実現する。
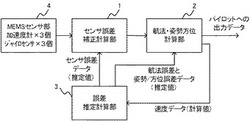
【解決手段】移動体搭乗者のヘルメットに取付けられたジャイロセンサと加速度計の出力を利用して当該搭乗者頭部の位置や姿勢を求める慣性航法装置において、ジャイロセンサおよび加速度計の出力を補正するセンサ誤差補正計算部と、センサ誤差補正計算部により補正されたジャイロセンサおよび加速度計の出力を利用して頭部の位置や姿勢を計算するとともに、頭部の位置や姿勢の計算結果を補正する航法・姿勢方位計算部と、頭部が静止状態にあるときに航法・姿勢方位計算部より出力される速度データを速度誤差として利用し、センサ誤差補正計算部で使用するセンサ誤差データを校正するとともに、姿勢/位置誤差データを校正する誤差推定計算部とを有することを特徴とする。
(もっと読む)
小型姿勢センサ

【課題】カルマンゲインやクォータニオンの算出を容易にして現実的な姿勢センサの実装を可能にし、さらに、小型化及び実時間処理を可能とする小型姿勢センサを提供することを目的とする。
【解決手段】移動物体の独立な3軸上の角速度を計測する角速度センサ101、移動物体の独立な3軸上の加速度を計測する加速度センサ102、移動物体の独立な3軸上の地磁気を計測する地磁気センサ103、角速度センサ101、加速度センサ102、及び地磁気センサ103の計測値を基にクォータニオンの推定値を算出する演算処理部104を備え、クォータニオン推定値をクォータニオンにより表現する三次元姿勢角として出力することを特徴とする小型姿勢センサを提供する。
(もっと読む)
固体の移動を推定するための方法
本発明は、3つの変数ベクトルによって定義される外乱を生成しうる媒体における固体移動体による方法であり、移動は、6つの変数ベクトルによって定義され、固体は、少なくとも3つの感度軸を有する加速度を感知する少なくとも1つのセンサと、少なくとも3つの感度軸を有する磁界を感知する少なくとも1つのセンサと、を備える。固体の移動を推定するための本発明の方法は、6つの変数の移動ベクトルと、3つの変数の外乱ベクトルからなる9つの変数ベクトル(Λ)を計算するステップ(B6)と、9つの変数ベクトルを推定されることになっている最大で5つの変数を有するベクトルに変換することができる9つの変数ベクトル(Λ)に重み付けを行うステップ(B6)と、を含む。 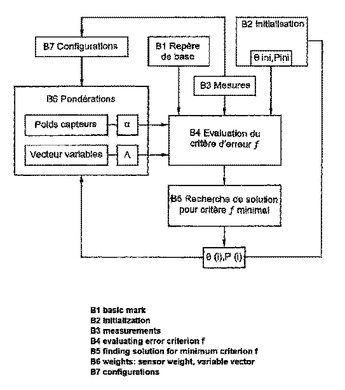 (もっと読む)
(もっと読む)
取付け角度算出装置
【課題】移動体が水平面を走行している状態もしくは車両が水平面に停車している状態のみではない実走行状態において、高度変化量の算出等の機能を有する他の高価なセンサーを用いることなく電子機器の筐体の取付け角度を精度良く算出することのできる取付け角度算出装置をを提供する。
【解決手段】取付け角度算出装置1は、移動体の角速度を検出する1軸の角速度センサ10と、車両の走行速度に応じてパルス周期が変化する車速パルスを発生する速度センサ11と、移動体の加速度を検出する加速度センサ12と、移動体の走行状況を判定するカーブ・直進判定手段14とを備え、取付け角度演算手段13は、移動体が直進しているとき取付け角度を算出し、カーブ走行時に算出した値が正確かどうか検証する。
(もっと読む)
回転数検出装置及び回転飛翔体
【課題】 外乱の影響を受けることなく、正確に回転飛翔体の回転数を検出することを目的とする。
【解決手段】 回転体が回転することによって生じる遠心加速度と重力加速度とを検知すると共に当該遠心加速度と重力加速度との合成加速度に応じた加速度検出信号を出力する加速度検出手段と、前記加速度検出信号の変動周期に基づいて前記回転体の回転数を検出する信号処理手段とを具備する、という手段を採用する。
(もっと読む)
船舶用表示装置
【課題】船舶を迅速且つ正確に接岸又は離岸させることを可能とする船舶用表示装置を提供する。
【解決手段】航跡処理部36は、入力データ記憶部34から入力された船舶の現在時刻における船首尾線方向及び正横方向の速度に基づいて予測航跡を生成し、座標データ記憶部40を介して画像生成部42に出力する。速度ベクトル処理部38は、入力データ記憶部34から入力された前記速度に基づいて、前記現在時刻における加速度を求め、求められた前記加速度に基づいて、前記予測航跡上における前記船舶の速度ベクトルを生成し、座標データ記憶部40を介して画像生成部42に出力する。画像生成部42は、前記予測航跡上に前記速度ベクトルを重畳表示させた画像情報を生成し、生成された前記画像情報を表示部44に出力させる。
(もっと読む)
ナビゲーション装置
【課題】 装置の取り付けの簡素化、安全性の向上を図ることができるナビゲーション装置を提供する。
【解決手段】 車両の進行方向における加速度を検出する加速度センサ101と、車両のヨー動作方向の角速度を検出するジャイロセンサ3とを備え、演算手段109は、まず加速度センサ101により得た加速度情報より速度および走行距離△Dnを計算し、ジャイロセンサ102により得た角速度情報より移動方位
θznを計算し、求めた走行距離△Dnと移動方位θznと車両の位置を求める。
(もっと読む)
車載機器
【課題】 温度変化によるずれを補正することで、実際の車体の状況に即した表示を可能とする。
【解決手段】 この車載機器には、車体に取り付けられる車載機器本体と、車載機器本体に設けられて種々の情報を表示する表示手段と、車載機器本体の進行方向に対する傾き及び水平方向に対する傾きを検出することで加速度を検出する加速度検出手段と、加速度検出手段の検出結果に基づいて表示手段を制御する制御手段とが備えられている。制御手段は、加速度検出手段が検出した進行方向に対する傾き及び水平方向に対する傾きが所定時間一定であった場合には、車体が停止状態と判断して、所定時間一定であった傾きを進行方向及び水平方向の基準値として設定する。
(もっと読む)
ジャイロセンサ及びナビゲーション装置
【課題】 移動体が傾いた状態でも移動体の相対的な方位を正確に求めることが可能な高性能なジャイロセンサを提供すると共に、このようなジャイロセンサを用いることにより移動体の現在位置の検出精度向上を図った信頼性の高いナビゲーション装置を提供する。
【解決手段】 GPS電波を受信するGPS受信部1と、回転角を出力して自車の相対的な方位を検出するジャイロセンサ2と、走行距離を算出する車速センサ3とが設けられている。さらに、傾斜センサ20及び回転角補正部21が設けられている。傾斜センサ20は走行車両の傾斜角θを求めるものであり、回転角補正部21は前記傾斜角θに基づいてジャイロセンサ2が出力した回転角を補正する部分である。
(もっと読む)
自立航法センサ
【課題】 より少ない磁気検出素子数で、コンパクトな自立航法センサを提供すること。
【解決手段】 自立航法センサは、車両に設置され、車両に備わる少なくとも1個のタイヤに備わるスチールベルトの残留磁気による磁界と、地磁気に基づく磁界との合成磁界を検出するX軸磁気検出素子11と、X軸磁気検出素子11が検出対象とする合成磁界と直交する直交磁界を検出するY軸磁気検出素子13とを備える。ここで、両磁気検出素子11及び13はタイヤ近傍に配置される。自立航法センサはさらに、X軸磁気検出素子11で検出された合成磁界及び/又はY軸磁気検出素子13で検出された直交磁界に基づいて、車両に備わる車輪の回転を表す回転信号を生成する回転信号生成部3と、X軸磁気検出素子11で検出された合成磁界及び/又はY軸磁気検出素子13で検出された直交磁界に基づいて、車両の向き方位を算出する方位角算出部4とを備える。
(もっと読む)
31 - 40 / 45
[ Back to top ]