
国際特許分類[G01C21/20]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 航行の計算を行う機器 (19)
国際特許分類[G01C21/20]の下位に属する分類
海図板 (1)
国際特許分類[G01C21/20]に分類される特許
1 - 10 / 18
運航支援装置及び船
【課題】十分な燃料消費量の低減をすることができる運航支援装置及び船を提供する。
【解決手段】船舶航行時の周囲の海気象データを取得する通信装置11と、平水の影響下での船の平水中性能、波浪の影響下での船の波浪中性能、及び風の影響下での船の風中性能のそれぞれの個船性能を記憶する個船性能データベース8と、通信装置11で取得した海気象データ、個船性能データベース8に記憶した、平水中性能、波浪中性能、及び風中性能に基づいて、航海での燃料消費量である燃費が最小となる状態を推定する最適状態推定手段とを備えるものである。
(もっと読む)
船舶運航支援装置

【課題】適正燃費を達成し、操縦者の操縦上の負担を大幅に軽減することができる船舶運航支援装置を提供する。
【解決手段】入力手段22によって入力される船舶の航行情報と、及び記憶手段25から得られる前記航行情報に関連する海象情報と、位置情報認識手段30によって取得される航行中の船舶10の位置情報とから、前記航行情報に基づく船舶10の航行中の少なくとも推奨回転数情報を有する燃費情報を作成する制御手段23と、前記推奨回転数情報と実回転数情報とを操縦者に認識可能に表示する表示手段24とを有する船舶運航支援装置である。
(もっと読む)
オートパイロット制御装置
【課題】オートパイロット制御に必要なパラメータ値の設定操作をシンプル、かつ簡単なものとする。
【解決手段】 制御パラメータ(N個)を用いるオートパイロット制御装置において、(1)N個の制御パラメータ毎に1個づつ、合計N個設けられた、パラメータ値を最小値から最大値までの範囲で調整する、調整ツマミと、(2)複数種類の制御モード(M個)毎に、それぞれ、上記N個の制御パラメータの各スケーリングを記憶した合計M個のスケーリング記憶部と、(3)上記M個の制御モードを選択的に切り換える切換操作部と、(4)切換操作部で選択された制御モードに対応するスケーリング記憶部の各スケーリングに基づいて、各調整ツマミからの出力信号から、上記N個の制御パラメータ値を決定するN個の決定部と、設ける。これにより、個々のパラメータ値毎に、個別にツマミを操作する必要がなくなり、ワンタッチで各パラメータ値を一度に変更できる。
(もっと読む)
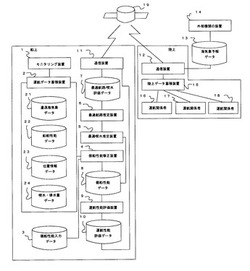
船舶運航支援システム
【課題】高精度の個船性能データを得ることができ、また、これにより最適航路評価を高めることができる船舶運航支援システムを提供する。
【解決手段】航行中の船舶が遭遇している海気象に係る遭遇海気象データ及び海気象における船舶の性能に係る船舶性能データを作成するモニタリング装置110と、船舶の平水中における性能を表す平水中性能データを作成するため、設定した条件を満たす遭遇海気象データ及び船舶性能データを抽出処理して平水中性能データを作成処理し、船舶に対してあらかじめ設定した個船性能に係る個船性能入力データを補正して、運航における個船性能に係る個船性能データを作成する個船性能作成装置120と、個船性能データ及び海気象予測データに基づいて、船舶の最適な航路を推定する処理を行う最適航路推定装置140とを備える。
(もっと読む)
船体用制御装置及び船体用制御プログラム並びに船体用制御プログラムを組み込んだ自動操舵装置
【課題】補助推進装置の設置や舵の制御が不要で、目標位置を設定するだけで目標位置までの経路上に船体を漂流させる船体用制御装置及び船体用制御プログラム並びに船体用制御プログラムを組み込んだ自動操舵装置を提供する。
【解決手段】船体は、船体用制御装置1とGPS航法装置2とクラッチ制御装置3とスパンカーとを備える。繰船者が目標位置を設定すると、現在位置から目標位置までの設定経路が算出され、船体と設定経路との離間距離が限界偏位量を超えた場合、クラッチ制御装置3がクラッチ4を嵌めて船体を推進させ、船体が設定経路上に復帰するとクラッチ制御装置3がクラッチ4を脱して船体を停止させる。
(もっと読む)
航行情報表示装置
【課題】目標地点への到達が容易な航行情報表示装置を提供する。
【解決手段】表示画面10を備えた画像表示器と、自船の位置を検出し、自船位置情報として出力する自船位置検出装置と、自船の船首方向の方位を検出し、方位情報として出力する方位検出装置と、目標地点Tの位置情報を記憶する位置情報記憶手段と、自船位置情報と方位情報と目標地点Tの位置情報とに基づいて、現在の船首方向を上向きとし、かつ現在の自船位置を固定表示してなる仮想水面42上に、前記目標地点Tを示す目標マーク41と、該目標地点Tを基準とする複数の等距離線39とを変動表示してなる目標到達支援画像31を前記表示画面10に表示する表示制御手段とを具備するようにした。
(もっと読む)
建物用の経路案内グラフ
本明細書で開示される主題は、建物情報に少なくとも一部基づいて、経路案内グラフを作成するための、システム、方法などに関する。いくつかの例示的な実装形態では、方法は、建物構造の少なくとも一部を表す建物情報を得るステップを含む。点のグリッドが、建物情報に重畳されうる。少なくとも1つの経路案内グラフが、重畳された点のグリッドおよび建物情報に少なくとも一部基づいて、作成されうる。他の例示的な実装形態も、説明される。 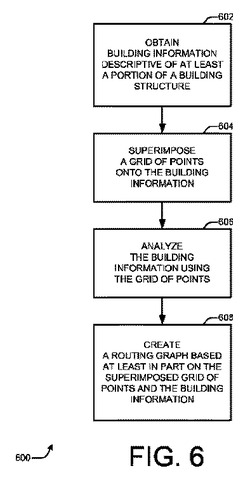 (もっと読む)
(もっと読む)
航海支援装置
【課題】
操船者が着目する各想定時刻における自船、物標の位置関係を最新時点の自船情報等に基づいて算出、表示できるようにする。
【解決手段】
所定の情報取得時刻毎に該時刻における自船等の位置、船速及び船針を含む自船情報を取得し、各想定時刻(位置等の算出時刻)における自船位置等を算出する。その際、表示させたい各想定時刻における自船等の位置の算出は、各算出時刻において、情報取得時刻のうち該算出時刻を基準として最新の情報取得時刻において取得された自船情報に基づいて算出するようにする。
(もっと読む)
位置検出装置および位置検出プログラム
【課題】累積される位置誤差を除去しながら屋内での移動位置を検出する位置検出装置を実現する。
【解決手段】ステップS1〜S6では、位置検出の基点となる開始点位置(もしくは前回検出した位置)から移動した方向および距離をセンサ出力に基づき算出して現在位置を検出する。そして、ステップS9では、検出した現在位置が建物の平面構造を表すレイアウトデータで示されるレイアウト図中の構造物と交差するか否かを判断する。交差する場合には、ステップS11に進み、その交差位置を新たな現在位置に更新して累積誤差をリセットする。そして、ステップS10では、更新された新たな現在位置をレイアウトデータで示されるレイアウト図上に重ね合わせて表示するので、累積される位置誤差を除去しながら屋内での移動位置を検出することができる。
(もっと読む)
走行軌跡生成方法及び走行軌跡生成装置
【課題】燃費特性を考慮した走行軌跡を生成する走行軌跡生成方法及び走行軌跡生成装置を提供することを課題とする。
【解決手段】駆動方式がハイブリッド方式の車両の将来の走行軌跡を生成する走行軌跡生成装置1であって、少なくとも道路境界線の条件を含む拘束条件を収束演算する拘束条件演算手段30と、拘束条件演算手段30での拘束条件を満たしている状態で、少なくともハイブリッドシステムにおける電力収支が正の場合の電力収支の評価を含む評価関数によって収束演算して走行軌跡を導出する評価関数演算手段30とを備えることを特徴とする。
(もっと読む)
1 - 10 / 18
[ Back to top ]