
国際特許分類[G01P21/02]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | このサブクラスの他のグループに包含される装置または器具の試験または較正 (327) | 速度計に関するもの (109)
国際特許分類[G01P21/02]に分類される特許
101 - 109 / 109
車両の速度検出装置

【課題】 隊列走行時に各車両の基準となる速度を一致させることを可能とした車両の速度検出装置を提供する。
【解決手段】 レーダ装置1や前方カメラ2と画像処理装置21により、先行車との車間距離や相対速度情報を求め、これと通信装置40により受信した先行車の速度情報を基にして制御ECU5は、現在の自車速度の算出または校正を行う。こうして求めた車速情報を用いて隊列走行を行うことで、隊列走行グループ内での基準速度が一致し、整然とした走行を行うことが可能となる。
(もっと読む)
車載検出装置の出力補正装置

【課題】 本発明は、補正を行う機会を増やすことができる車載検出装置の出力補正装置の提供を目的とする。
【解決手段】 コーナリング時に変化する車両状態量(ヨーレート、操舵角)の検出をする車載検出装置の出力値を零点補正する車載検出装置の出力補正装置において、前記零点補正に確実に直進している期間であるETCレーン9走行中の前記出力値を用いることを特徴とする車載検出装置の出力補正装置。車輪速の検出をする車載検出装置の出力値における左右の車輪速差を補正する車載検出装置の出力補正装置において、前記補正に確実に直進している期間であるETCレーン9走行中の前記出力値を用いることを特徴とする車載検出装置の出力補正装置。
(もっと読む)
角速度センサの中点補正装置
【課題】 角速度センサの中点補正の信頼度をより高めること。
【解決手段】 自動車に搭載され、所定の検出対象軸回りの角速度を検出するヨーレートセンサ20,30と、ヨーレートセンサ20,30の出力に基づいてその中点YR1n,YR2nを定める中点決定手段11と、中点決定手段11で定められた各中点YR1n,YR2nおよびヨーレートセンサ20,30の前回分の中点補正値YR1a,YR2aに基づいて、自動車の無回転状態を判定する無回転状態判定手段13と、無回転状態判定手段13で無回転状態が判定されたときに、中点決定手段11で定められた各中点YR1n,YR2nによりヨーレートセンサ20,30の前回分の各中点補正値YR1a,YR2aを更新するとともに、更新後の中点補正値YR1a,YR2aに基づき今回分の前記各中点YR1n,YR2nを補正する補正手段12とを備える。
(もっと読む)
状態検出装置およびその状態算出方法
【課題】 状態センサの応答速度が遅い場合でも、速い応答速度で状態量を取得することができ、かつ状態速度センサのオフセットがある場合でも発散することなく状態量が取得できる状態検出装置とその状態算出方法を得る。
【解決手段】 本発明の状態検出装置は、状態速度センサ1の情報とオフセット補正値との差分Aを算出する第1演算器34と、算出差分Aを積分し積分値を算出する積分器31と、積分値に対し状態センサ1の応答遅れと等しいフィルタ値を算出する遅れフィルタ32と、前記フィルタ値と前記状態センサの情報との差分Bを算出する第2演算器35と、前記差分Bとゲインとの積を前記オフセット補正値とし、前記差分Bを前記積分値から差し引いた値を状態量検出値4とする第3演算器32とを設けたものである。
(もっと読む)
加速度・角速度センサユニット
【課題】 基板の実装密度が低下する点を解決することで、基板の実装密度を向上させることを可能にするとともに、センサの実装精度が悪化する点を解決することで、センサの実装精度の向上を図ることを可能にする。
【解決手段】 基板61の裏面61bに、前後Gセンサ51及びロールレートセンサ54をX軸に平行に実装し、且つ左右Gセンサ52及びピッチレートセンサ55をY軸に平行に実装するとともに、前後Gセンサ51及び左右Gセンサ52を近接させ、且つロールレートセンサ54及びピッチレートセンサ55を近接させて実装し、基板61の表面61aに、上下Gセンサ53及びヨーレートセンサ56をZ軸に垂直に実装するとともに、上下Gセンサ53及びヨーレートセンサ56を近接させ実装した。
(もっと読む)
作業車輌における傾斜自動制御装置
【課題】 角速度センサの基準値を刻々と補正する際の演算負荷や必要なメモリ容量が小さく済み、しかも、角速度センサ出力の読み込み頻度が少なくても補正の精度が必要十分に確保される作業車輌における傾斜自動制御装置を提供する。
【解決手段】 一定時間ごとに角速度センサの出力データから現在の基準データを差し引いて差分データを求め、新しい基準データ=現在の基準データ+修正量、修正量=差分データ/(2のn乗)という演算を実行して基準データを修正するので、角速度センサの角速度0に対応する基準値が変化すると、新しい基準値に対応するレベルへ向かって基準データが演算ごとに誘導される。差分データが小さい場合は乗数nを段階的に増加させて修正量を減らすが、差分データが大きい場合は乗数nを段階的に減少させて1回あたりの修正量を増やす。
(もっと読む)
MEMS振動型慣性センサ用組込み試験
本発明は、慣性センサによって供給された、誤っているかまたは紛らわしいデータの識別を支援することにより信頼性改善を支援する、あるレベルの組込み試験を有するMEMS振動型慣性センサを提供する。試験信号がMEMS振動型慣性センサの1つまたは複数の入力に注入され、この試験信号は、1つまたは複数のMEMS振動型慣性センサ出力で試験信号成分を生成する。次いで、この試験信号成分が1つまたは複数の出力で観測される。この試験信号成分が、元の試験信号の少なくとも所定の特性と一致するなら、MEMS振動型慣性センサが適正に動作しており、誤っているかまたは紛らわしいデータを生成していないことがより有望である。実施形態には、試験信号が通常の機能動作中に供給され観測されるものがある。本発明は、慣性センサによって供給された、誤っているかまたは紛らわしいデータの識別を支援することにより信頼性改善を支援する、あるレベルの組込み試験を有するMEMS振動型慣性センサを提供する。例示の一実施形態では、試験信号がMEMS振動型慣性センサの1つまたは複数の入力に注入され、この試験信号は、1つまたは複数のMEMS振動型慣性センサ出力で試験信号成分を生成する。次いで、この試験信号成分が1つまたは複数の出力で観測される。この試験信号成分が、元の試験信号の少なくとも所定の特性と一致するなら、MEMS振動型慣性センサが適正に動作しており、誤っているかまたは紛らわしいデータを生成していないことがより有望である。実施形態には、MEMS振動型慣性センサの通常の機能動作中に試験信号が与えられて観測され、それによってセンサ稼動中の組込み試験を提供するものがある。 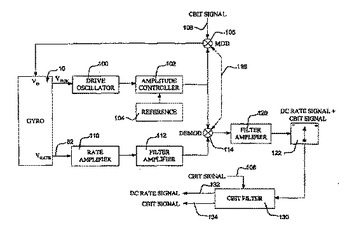 (もっと読む)
(もっと読む)
角速度センサ及び運送機器
角速度検知素子2及び第1及び第2の信号処理部21,22の各出力は、その個数に応じた入力端子数を有するスイッチ回路7の各入力端子に供給され、スイッチ回路7の出力端子は、出力端子4に接続される。スイッチ回路7は、モード信号発生回路8から出力されるモード信号に応じて接続状態を切り替え、角速度検知素子2及び第1及び第2の信号処理部21,22の各出力のいずれかを選択して出力端子4へ供給する。 (もっと読む)
角速度センサ
【課題】本発明は、音叉振動子上に特別の異常診断用信号入力電極や角速度検出の誤差を低減する為の基準電位接地電極を設けることなしに、異常診断が可能な角速度センサを提供することを目的とするものである。
【解決手段】スイッチ45,48を用いて出力端子49,50に同相の駆動信号を生じせしめることによりアーム2,3を同じZ軸方向に撓ませ、アーム2,3上に設けられた第10、第12の電極22,25から得られる電荷を第1、第2の増幅器62,63により増幅し、これらの出力を差動増幅器64に入力し、その出力と基準値発生手段82から発せられた所定の値とを比較器81により比較し、所定値を超える場合には異常と判断できるように構成した。
(もっと読む)
101 - 109 / 109
[ Back to top ]