
国際特許分類[G01P21/02]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | このサブクラスの他のグループに包含される装置または器具の試験または較正 (327) | 速度計に関するもの (109)
国際特許分類[G01P21/02]に分類される特許
41 - 50 / 109
角速度補正装置及びその補正方法並びにナビゲーション装置
【目的】センサーの取り付けピッチ角、車両のピッチ角、ジャイロセンサーの感度誤差の3つの誤差要因に対処できる「角速度補正装置及びその補正方法並びにナビゲーション装置」を提供することである。
【構成】角速度検出センサーの水平面に対する傾斜角に起因するセンサー感度の変化および角速度検出センサーの感度誤差を考慮して該センサー感度を補正する第1のセンサー感度補正方法と、角速度検出センサーの感度誤差を考慮せず、角速度検出センサーの水平面に対する傾斜角に起因するセンサー感度の変化を考慮して該センサー感度を補正する第2のセンサー感度補正方法を実施可能にし、該第1のセンサー感度補正方法により得られたセンサー感度と第2のセンサー感度補正方法により得られたセンサー感度の比によりセンサーの感度誤差を算出し、該感度誤差を用いて角速度検出センサーが出力する角速度を補正する。
(もっと読む)
慣性センサの検査装置

【課題】特定の軸周りの回転方向に、安定した角周波数の周期で、慣性センサを正逆回転させ、振動させることができる慣性センサの検査装置を提供すること。
【解決手段】慣性力を検出する慣性センサ50の周波数特性を検査する慣性センサの検査装置10において、端面21に慣性センサ50を支持するための構造を有する支持柱20と、支持柱20の端面21に対して音波を出力することにより、端面21を支持柱20の軸周りに共振させる共振手段40と、を備える。
(もっと読む)
車両用現在位置検出装置及びプログラム
【課題】角速度センサのゲイン誤差の推定精度を向上させる。
【解決手段】車両の角速度を検出するジャイロ6のゲイン誤差を状態量としてその推定値をカルマンフィルタにより求める誤差推定部15と、ジャイロ6による検出値のゲイン補正に用いるゲイン補正量を、誤差推定部15により求められたゲイン誤差に基づき修正する補正部16とを備える。ここで、補正部16は、車両の旋回方向が右旋回と判定されている状態では右旋回専用のゲイン補正量をゲイン誤差に基づき修正し、左旋回と判定されている状態では左旋回専用のゲイン補正量をゲイン誤差に基づき修正する。
(もっと読む)
慣性センサ装置及び慣性センサ装置を備えた電子機器
【課題】慣性センサが角速度又は加速度が変化する運動を行っているときであっても、慣性センサの出力値に及ぼすバイアス成分の影響をより確実に軽減することができる慣性センサ装置を提供することを目的とする。
【解決手段】慣性センサと、前記慣性センサの非反転姿勢における出力値をy1と、前記慣性センサの反転姿勢における出力値をy2としたとき、次式(1)によって算出される前記慣性センサの出力値に含まれるバイアス成分b0を予め記憶する記憶手段7と、前記慣性センサの出力値を、前記記憶手段7が記憶するバイアス成分b0に基づいて補正する補正手段8とを備えたことを特徴とする慣性センサ装置1を提供する。
b0=(y1+y2)/2…(1)
(もっと読む)
運動計測装置及び位置計測装置
【課題】簡易な構成で、ロバスト性を確保して、移動体の運動を精度よく計測することができるようにする。
【解決手段】撮像画像に基づく運動推定処理を行い、自車両の運動の3軸角速度及び並進方向を示す成分の推定値を算出する(160)。そして、ジャイロセンサで検出された3軸角速度を取得し(162)、自車両の外部を撮像した複数の画像に基づいて算出された3軸角速度の平均値と、ジャイロセンサによって検出された3軸角速度の平均値との差に基づいて算出された補正量ΔRを取得する(164)。取得した3軸角速度の各々について、角速度Rjyroから、取得した補正量ΔRを減算して、補正した角速度R´jyroを算出し(166)、補正された3軸角速度と、得られた並進方向を示す成分とを、自車両の運動の推定値として出力する(168)。
(もっと読む)
検査装置
【課題】静電容量検出方式のジャイロセンサの電気的特性を検査するに際し、プローブおよびプローブに接続された配線パターンによって生じる寄生容量の影響を低減し、測定精度を向上させることができる検査装置を提供する。
【解決手段】第1プローブ32aと第3プローブ32cとの間の寄生容量をCen1、第2プローブ32bと第3プローブ32cとの間の寄生容量をCen2、第2配線33bと第3配線33cとの間の寄生容量をCep1、第1配線33aと第3配線33cとの間の寄生容量をCep2とし、Cen1≠Cen2、Cep1≠Cep2としたとき、Cen1−Cen2=Cep1−Cep2の条件を満たすように各配線33a〜33cをレイアウトする(図3(b))。
(もっと読む)
移動中の人の推移を測定する方法および装置
本発明は、物理測定に使用される測定装置に関し、特に、移動中の人の推移を測定するための方法および装置に関する。本発明による解決方法では、移動する人物の推移を表す量は、加速度センサにより測定された加速度値から得られた、歩周期別加速段階特徴加速度a+および歩周期別ブレーキ段階特徴加速度a−と、その測定された時間と、に基づいて計算される。本発明は、従来の解決方法に比べてより良くより簡単な、移動中の人の推移を測定するための解決方法を提供することを目的とする。なお、前記解決方法は、異なる種類の移動のための、多くの測定解決方法の使用に適応可能である。 (もっと読む)
車両用角速度センサの零点補正装置
【課題】車両に搭載される角速度センサの零点補正精度を向上させるとともに、車両が実際に使用されている状態での零点補正処理の頻度を上げる。
【解決手段】オフディレイ回路42は、イグニッションスイッチ50のオフ後にオン状態になっている所定時間にバッテリ40からイグニッションスイッチ50を迂回して3軸角速度センサ22、3軸加速度センサ24に電源+Bを供給する。この所定時間に車両停止状態検知センサ14(例えば、燃料計)の出力変化に基づいて車両が停止していると判断したとき、零点補正手段30が、3軸角速度センサ22の出力を更新後の零点補正値として記憶手段28に記憶し、更新後の零点補正値により3軸角速度センサ22の検出値を補正する。
(もっと読む)
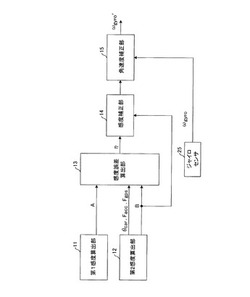
ナビゲーション装置、傾斜角を用いた角速度補正装置および方法
【課題】車両の傾きが存在する環境でも、簡単なアルゴリズムで感度補正とゼロ点補正を行うことができ、自律航法精度を向上させることができる「ナビゲーション装置、傾斜角を用いた角速度補正装置および方法」を提供する。
【解決手段】加速度傾斜角θaccおよびGPS傾斜角θgpsからセンサ傾斜角θsensorと車両傾斜角θcarとを算出し、この2つの傾斜角θsensor,θcarに基づいて角速度ωgyroを補正することにより、車両が傾いているときでも、角速度センサ4の感度補正と同時に加速度センサ1のゼロ点補正を行うことができるようにする。また、このように同じ演算の中で角速度センサ4の感度補正と加速度センサ1のゼロ点補正とを行うことにより、簡単なアルゴリズムで感度補正とゼロ点補正を行うことができるようにする。
(もっと読む)
角速度センサ制御装置
【課題】より正確にオフセット電圧を補正できるようにする。
【解決手段】車速センサから入力される車速信号に基づいて車両が停車状態か否かを判定し(S100)、車両が停車状態であると判定された場合、カメラ14によって同一方向を撮影した複数の画像の一致または不一致により車両が停車状態であるか否かを判定し(S202)、車両が停車状態でないと判定された場合、キャリブレーション処理を禁止する。
(もっと読む)
41 - 50 / 109
[ Back to top ]