
国際特許分類[G01P3/36]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | 直線速度または角速度の測定;直線速度の差または角速度の差の測定 (1,568) | 光学的手段の使用によって特徴づけられた装置,例.赤外線,可視光線または紫外線の使用 (184)
国際特許分類[G01P3/36]の下位に属する分類
写真式手段を用いるもの (2)
ストロボ式手段を用いるもの (3)
国際特許分類[G01P3/36]に分類される特許
31 - 40 / 179
光学的車両レーザ検出システム
本発明は車両の動きを分析するレーザダイオードを用いたマルチビームレーザスポット画像処理システムに関連する。レーザダイオード(好ましくはVCSEL)を用いた画像処理システムは、車両の運動を分析するために使用される。1つ以上のレーザビームが路面に向けられている。CCDやCMOSカメラのような画像処理マトリクスセンサを含む小型画像処理システムは、個々のレーザスポットの位置又は距離を測定する。車両の積載状況、車両のピッチ及びロール角は、レーザスポットの位置や距離の変化を分析することで判明する。  (もっと読む)
(もっと読む)
車両用電子安定プログラムのための、レーザダイオードをベースにした自己混合センサ
本発明は、簡単にした車両安定制御のための、レーザダイオードをベースにした自己混合レーザセンサに関する。自己混合レーザセンサから、車両のサイドスリップ角、前輪及び後輪スリップ角、ヨーレート並びに横方向加速度が、はっきりと導き出される。ヨーレート、旋回半径及びタイヤスリップ角の分析に基づく3つの基準が、アンダーステア又はオーバーステアの発生を検出するのに用いられ、これは、簡単にした車両用電子安定プログラムを可能にする。 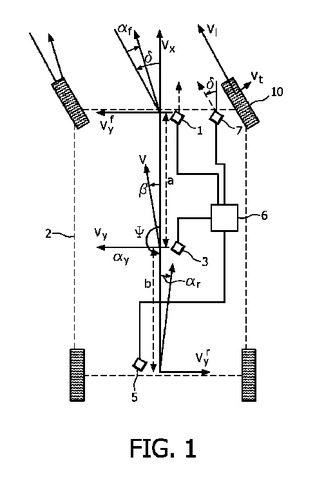 (もっと読む)
(もっと読む)
蒸気タービン内の液滴計測装置及び液滴計測方法

【課題】多方向に飛散する液滴に対応でき、流速の速い蒸気流中でも光ファイバが破損することが無く、複数回液滴が突き刺さっても精度良く計測する。
【解決手段】光ファイバ11と光ファイバ11を先端から離れた位置で支持する円筒部材12を蒸気流の方向に配置し、光ファイバ11に液滴Dが当たることにより液滴径と速度を計測する蒸気タービン内の液滴計測装置であって、円筒部材12に光ファイバ11を覆う液滴防護筒131を設ける。液滴防護筒131は、その底部に液滴排出孔14を有する。
(もっと読む)
衝突判断処理システム、コンピュータプログラムおよび風力発電装置

【課題】 三次元空間を移動する物体が所定領域に対して所定時間内に到達するか否かを判断するためのシステムにおいて、演算処理の複雑さを回避してリアルタイム処理の実現を図る。
【解決手段】 所定の空間領域(11)を異なる方向から同期させて連続撮影する左カメラ(12L)と右カメラ(12R)を備えた撮影手段と、その左側画像データおよび右側画像データの高さ方向を予め同一に設定するとともにその画面縦方向の上下に予め設定した許容範囲に限って粒子(15)の対応付けを実行して三次元データを作成するステレオマッチング手段(14)と、その三次元データの粒子(15)と次の時刻の粒子(15)の中で最短距離の粒子(15)を対応付ける時刻間対応付け手段と、その二つの時刻間の粒子(15)で三次元速度ベクトル(16)を算出する速度ベクトル算出手段と、その速度ベクトル(16)が予め設定した対象領域(17)へ所定時間内に到達するか否かを判断する衝突判断手段と、を備える。
(もっと読む)
張力・速度計測装置および方法
【課題】ウェブの種類によらずにウェブの張力を高精度に計測し、同時にウェブの速度を安価に計測する。
【解決手段】張力・速度計測装置は、搬送装置によって搬送中の物体であるウェブ11にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光とウェブ11からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力に含まれる干渉波形の数を数える信号抽出部7と、信号抽出部7の計数結果に基づいてウェブ11の速度および張力を算出する演算部8とを備える。
(もっと読む)
張力・速度計測装置および方法
【課題】ウェブの種類によらずにウェブの張力を高精度に計測し、同時にウェブの速度を安価に計測する。
【解決手段】張力・速度計測装置は、搬送装置によって搬送中のウェブ11にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1からのレーザ光とウェブ11からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2と電流−電圧変換増幅部5とフィルタ部6と、フィルタ部6の出力に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7が計測した個々の周期の基準周期に対する変化に基づいてウェブ11の速度および張力を算出する演算部8とを備える。
(もっと読む)
鳥威嚇装置および風力発電装置
【課題】 高性能なコンピュータを使わなくても飛翔物の速度をリアルタイムで算出し、飛翔物が鳥であることを検出し、鳥に対して効果的な威嚇を行うことによってバードストライク回避の可能性を高める。
【解決手段】 鳥威嚇装置(13)は、所定の空間領域(11)を連続撮影する撮影装置(12)と、その撮影装置(12)が取得した複数の画像データ間のモード変化で画像内の飛翔体(30)の速度をオプティカルフロー方式で算出し、その算出した飛翔体(30)の速度が予め設定した設定速度以上であって当該速度が鳥による速度に相応しい場合に鳥(31)であると判断する鳥検出装置(46)と、その鳥検出装置(46)が鳥(31)であることを検出したときに前記所定の空間領域(11)に向けて威嚇出力を出力する威嚇装置(13)と、を備える。
(もっと読む)
球形物体の飛行情報測定システム及び方法(SYSTEMANDmETHODFORmEASURINGFLIGHTPARAMETERSOFASPHERICALOBJECT)
球形物体の飛行情報測定システム及び方法が開示される。トリガー信号生成部は球形物体が検出されると、第1トリガー信号を生成して出力し、第1トリガー信号の生成時点から球形物体の最大飛行速度及び最大回転速度に基づいて設定された基準時間間隔が経過すると、第2トリガー信号を生成して出力する。撮影部は、所定面積を有する第1映像獲得領域に対して球形物体が存在する映像を第1トリガー信号及び第2トリガー信号のそれぞれに対して複数撮影する。映像獲得部は、トリガー信号生成部から入力された第1トリガー信号及び第2トリガー信号を撮影部に提供し、第1トリガー信号及び第2トリガー信号のそれぞれに対応して撮影部から入力された複数の映像をデジタル映像に変換して貯蔵する。情報測定部は、複数のデジタル映像から球形物体の飛行速度、飛行角度、回転速度及び回転軸を含む飛行情報を算出する。
 (もっと読む)
(もっと読む)
レーザードップラー速度計
【課題】被検体の速度を安定して精度良く測定するレーザードップラー速度計を提供する。
【解決手段】レーザードップラー速度計100は、被検体Dの表面で干渉及び反射された散乱光を受光する複数の受光素子120を含む光学センサ110と信号処理ユニット130とを有し、信号処理ユニット130は、複数の受光素子120の出力のうち信号レベルが許容値以上であるかどうかを判断することによってその一つ選択するための選択信号を生成するCPU138と、選択信号に基づいて信号S1を信号S2に切り替える選択切換部146と、信号S1と信号S2の位相差に対応する時間差だけ信号S2の立ち上がり及び立ち下がりを遅延させて信号S1と重ねることによってパルス信号を生成する差分遅延処理部148と、を有する。
(もっと読む)
車両の速度を測定する自己混合レーザセンサシステムを調整する方法
本発明は、センサの該センサに対して移動する表面に対する向きを決定し、次いで横方向速度が小さく且つ前方向速度が大きなデータを取得することに基づくものである。次いで、前方向速度の方向に対する当該センサの向きが決定され、続いて測定される速度データは、上記基準表面及び前方向速度の方向に対する該測定されたセンサの向きを用いて補正される。  (もっと読む)
(もっと読む)
31 - 40 / 179
[ Back to top ]