
国際特許分類[G01S13/42]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818) | 物標の位置データを決定する方式 (1,263) | 距離とそれに類する他のものとの同時測定 (186)
国際特許分類[G01S13/42]の下位に属する分類
モノパルスレーダ,すなわち同時ロービング (119)
国際特許分類[G01S13/42]に分類される特許
51 - 60 / 67
レーダ装置
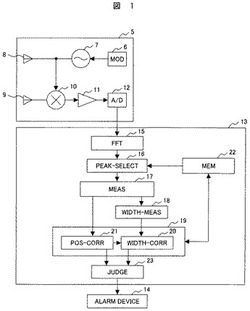
【課題】広角2次元監視をおこなうモノパルス方式のレーダを用いて、物体の種別を精度よく判定しうる安価な監視レーダ装置を提供する。
【解決手段】角度計測にモノパルス方式を採用したレーダ装置を用いて、監視領域内を移動する物体上の複数の箇所における反射波を受信し、各反射波について反射箇所を計測する。そして、計測データに基づき、移動物体の位置と監視レーダ装置の測角方向における大きさを算出する。
(もっと読む)
レーダシステム

本発明の実施の形態はレーダシステムに関し、特に地表に配置された対象を検知し追跡することに適した走査型レーダシステムに関する。ある実施の形態では、レーダシステムは走査型レーダシステムである。その走査型レーダシステムは、周波数発生器と、周波数走査型アンテナと、対象からの信号を受信して処理し、対象に伴うドップラー周波数を見出す受信器と、を備え、周波数発生器は、信号の組を複数生成し、その組はそれぞれ異なった特性周波数を有し、周波数発生器は、所与の特性周波数を持つ連続波信号を一連の変調パターンによって変調することで信号の組を生成するデジタルシンセサイザを含み、周波数走査型アンテナは、周波数発生器と協同して、発生された周波数に依存した角度範囲を有する領域に亘って放射を送受信する。したがって本発明の実施の形態は、精度良く周波数を生成し制御できるデジタルシンセサイザ技術と、受動的周波数走査技術及びドップラー処理技術を融合した。これにより、範囲および走査レートを正確に制御することが可能となり、対象の移動速度の早い遅いや信号対ノイズ比のような要素に対してレンジセルのサイズを最適化することが可能となり、したがって同様の電力を必要とする既知のシステムにおいて検知可能である距離よりもさらに大きな距離を隔てて位置する対象を検知することが可能となる。 (もっと読む)
被測定物検出装置
【課題】電磁波の照射による被測定物を検出する際の近距離における被測定物の検出を容易にすると共に、被測定物検出装置と被測定物との間にある阻害物体による検出感度の低下を改善する。
【解決手段】被測定物検出装置1であって、パルス状のレーザ光を拡散的に放射する投光部4と、投光部4から放射されたレーザ光を平行光に変換する凸レンズ9と、凸レンズ9で変換されたレーザ光が被測定物14に照射され、被測定物14で反射したレーザ光を、凸レンズ9を経由して受波する受光部5と、投光部4と凸レンズ9との間、および受光部5と凸レンズ9との間に介在し、投光部4から出射されたレーザ光を凸レンズ9に導くと共に、被測定物14で反射したレーザ光を凸レンズ9から受光部5に導くPBS6と、投光部4から放射されたレーザ光と、受光部5にて受波されたレーザ光とを比較し、被測定物14までの距離を検出する距離検出部13とを備える。
(もっと読む)
レーダ装置、レーダ信号処理器およびレーダ装置動作方法
【課題】レーダ装置使用中の経時変化、温度変化に起因する性能低下を効果的に補償するための構成を、車両への影響や、装置自身の大型化、複雑化、コスト増を局限しつつ実現すること。
【解決手段】位相差/利得差検出部33は、受信デジタル信号間に生ずる位相差/利得差を受信系ごとに検出する。初期位相差/初期利得差記憶部34は、受信系を構成する構成品の特性バラツキに起因して受信デジタル信号間に生ずる受信系ごとの位相差/利得差を初期位相差/初期利得差として予め記憶する。位相差/利得差補正量算出部37は、初期位相差/初期利得差と運用時に出力される位相差/利得差とに基づいて生成される位相差補正信号38/利得差補正信号39を位相/利得演算処理部31に出力する。位相/利得演算処理部31は、位相差補正信号38/利得差補正信号39に基づいて測角信号処理部32への出力信号を補正する。
(もっと読む)
レーダ装置およびその指向性制御方法
【課題】 車両周辺監視用レーダ装置において、大型化を招くことなく簡単な構成で指向性を変化可能とする。
【解決手段】 アレイアンテナ部2で送受する送信、受信信号をRF回路部3で処理し、遅延時間差に基づいて信号処理部4の距離計測部22が距離を算出する。電磁波放射部18は所定の固定経路差でそれぞれ送信信号給電線に結合された複数のアンテナ素子からなり、スイッチ回路17が励振すべきアンテナ素子数を切り替える。送信周波数制御部23により送信周波数を変化させると検知方位が変化し、アレイ数制御部24によりスイッチ回路を制御してアンテナ素子数を変化させると検知幅が変化して指向性が変化する。検知エリア設定部26が走行環境等に基づいて必要な検知エリアを設定して送信周波数制御部23とアレイ数制御部24に指示することにより、自動的に電磁波放射部の指向性が変化される。
(もっと読む)
車両用測距装置
【課題】車両からの反射波の波形パターンが路面での反射波の波形パターンに近似する状況下でも先行車のロストの発生を防止する。
【解決手段】レーザレーダ装置(車両用測距装置)は、レーザ光を2次元スキャンするスキャナ13と、制御回路11とを備えている。制御回路11は、スキャンにより得られた受光データから、検出した物体までの距離が所定範囲内にあるか否かを判定し、所定の範囲内にあると判定したとき、少なくとも、第1の条件と第2の条件が充足されると該物体をその後のスキャンにおいても車両として確定認識する車両確定フラグをセットする。第1の条件は、該物体が先行車として所定の時間以上連続して先行車として認識されていることである。第2の条件は、垂直方向で最上のスキャン又はその近辺のスキャンにより測定した該物体までの距離と該物体に対応する先行車までの測定距離との距離差が所定範囲内にあることである。
(もっと読む)
距離計測装置、距離計測方法および距離計測プログラム
【課題】高精度で詳細な距離情報を迅速に取得すること。
【解決手段】本発明にかかる距離計測装置1は、撮像部10から出力された画像信号群に基づいて撮像視野内に位置する物体までの距離を演算する距離演算部20と、検出範囲内に位置する物体までの距離を検出するレーダ60と、レーダ60の検出値間に距離演算部20の演算値で補間した検出範囲内データと、レーダ60の検出範囲外に対応する演算値からなる検出範囲外データとを組み合わせた距離データを作成する補間部31とを備える。補間部31は、現処理中の検出範囲外データの取得完了までの間、前回の検出範囲外データを用いて距離データを作成する。
(もっと読む)
レーダ装置
アンテナビームの組み合わせから得られる複数の目標の方向を精度よく分離する。前記複数の方向に放射されたビームのうち、一部が重なり合う少なくとも2つのビームの受信波より前記信号検出器が算出した特徴量の組み合わせから、前記目標の方向である1次方向を算出する方向算出器と、前記方向算出器が算出した1次方向が複数存在する場合に、複数の前記1次方向の分布が所定の密度以上となる領域からその領域に属する1次方向に基づいて真の目標の方向である統合方向を算出する方向統合器を備えた。  (もっと読む)
(もっと読む)
車載用レーダ装置
【課題】 走行区画に存在する目標物を精度良く検出することの出来る車載用レーダ装置の提供
【解決手段】自車両15前方に向けて扇形の走査範囲RGに渡り送信信号OSを一定の送信周期で電磁波として放射する送信アンテナ3、放射された電磁波が目標物で反射された反射波を受信して受信信号RSを出力する複数の受信用アンテナ5、受信信号と送信信号から周波数複素振幅スペクトルを演算するスペクトル演算手段9、自車両の進行方向RDを演算取得する進行方向演算取得手段11、取得された進行方向に基づいて、周波数複素振幅スペクトルの、進行方向に対応する方向成分を演算抽出しその演算結果データを出力する進行方向成分抽出手段10、演算結果データに基づいて自車両の距離方位スペクトルを演算する距離方位スペクトル演算手段12、演算された距離方位スペクトルに基づいて、自車両の前方の目標物を検出する目標物検出部13を有して構成される。
(もっと読む)
物体検出方法及び装置
【課題】検出された物体が交通弱者のような特定物体かどうかを、当該物体が遠方に在る場合にも、正確、且つ確実に精度良く識別し得るようにした物体検出方法及び装置を提供する。
【解決手段】パルスレーザ光が照射されて所定の走査領域を走査し、光反射物体から反射光として戻ってくるまでの時間tを基に光反射物体までの距離Lを求めると共に、光反射物体からの反射光を基に求めた反射光強度H及び距離Lを基に検出した物体データの点群のうちに、最大反射光強度値Hmaxが、基準距離Loと基準反射光強度Hoから定まる反射光強度閾値HL以上のものがある場合に、当該物体データは視覚障害者や車椅子両者等の特定物体であると判定する。
(もっと読む)
51 - 60 / 67
[ Back to top ]