
国際特許分類[G01S13/42]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818) | 物標の位置データを決定する方式 (1,263) | 距離とそれに類する他のものとの同時測定 (186)
国際特許分類[G01S13/42]の下位に属する分類
モノパルスレーダ,すなわち同時ロービング (119)
国際特許分類[G01S13/42]に分類される特許
11 - 20 / 67
レーダ装置
【課題】ターゲットから反射波を受信した際に、当該ターゲットが上方構造物であるか車両であるかを判別できるようにする。
【解決手段】演算処理器26は、反射波の強度の2階微分値を算出し、当該2階微分値に基づいてターゲット32が上方構造物であるか車両であるかを判別する。または、反射波の強度波形を周波数成分に分離し、特定の周波数成分の強度に基づいてターゲット32が上方構造物であるか車両であるかを判別する。
(もっと読む)
車両感知器

【課題】安価な構成で、道路を通過する車両の種々の情報を取得することができる。
【解決手段】道路を通過する車両の高さを検出するための車両感知器であって、道路に向かって無線信号を送信し、送信した無線信号が反射した無線信号を受信するための送受信部51と、送受信部51によって受信された無線信号に基づいて、無線信号が反射した位置と送受信部との間の距離を測定するための距離測定部52と、距離測定部52の測定結果に基づいて、道路を通過する車両の高さを算出するための車高算出部52とを備える。
(もっと読む)
車両検知装置および車両検知システム
【課題】レーダにより検知された車両が走行している車線を判別する。
【解決手段】車両検知装置は、複数の車線の各々に設置され、設置車線に隣接する車線を検知範囲に含むレーダからの情報を用いて車両を検知する。車両検知装置は、取得部、観測レーダ特定部、および、判定部を備える。取得部は、各レーダから、検知された対象物と対象物を検知したレーダの間の距離を表す検知距離、および、対象物の検知時刻を取得する。観測レーダ特定部は、第1のレーダにより検知された第1の対象物の検知距離と、第1のレーダの設置車線に隣接する車線に設置されている第2のレーダにより検出された第2の対象物の検知距離のうち、最も短い距離を観測した距離観測レーダを特定する。判定部は、第1の対象物と第2の対象物の間の距離が第1の閾値以下の場合に、距離観測レーダが設置されている車線を車両が走行していると判定する。
(もっと読む)
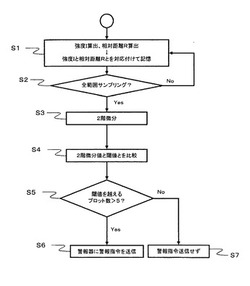
捜索レーダ装置および捜索レーダ装置における不要波成分抑圧方法
【課題】サイドローブの影響により発生するゴーストのレベルを抑圧し、所望信号レベルを相対的に向上させ確実に所望の目的検出を可能にした捜索レーダ装置を得る。
【解決手段】時分割で送信した複数の送信ビームに対し各送信ビーム毎に複数の各送信ビームと少なくとも同じ方向に関し同時に形成される複数の受信ビームに現れるアレーアンテナで受信した送信ビームの目標でのエコーから受信信号を抽出するレーダであり、各ビームスポット毎に、それぞれ複数の送信ビームのうちの所定数の連続する送信ビームからなる複数の送信ビーム群に対して受信ビームから抽出して得られる受信信号を時間軸上に並べた合成受信信号を生成する手段、合成受信信号とアレーアンテナのアンテナパターンを前記送信ビームの送信パルス幅及びビームスポット間隔に従い離散的に示す予め求めたパターン関数との相関処理を行い不要波成分を抑圧した受信信号を生成する手段を含む。
(もっと読む)
周波数検出器、この周波数検出器を備える合成帯域レーダ、及び飛翔体誘導装置
【課題】周波数検出器、この周波数検出器を備える合成帯域レーダ、及び飛翔体誘導装置を提供することを目的とする。
【解決手段】本発明の周波数検出器は、入力された複数の周波数バンドからなる周波数ホッピングの受信信号を複数サンプルのベースバンド信号に変換するベースバンド変換部と、前記ベースバンド変換部によって変換されたベースバンド信号を、複数の周波数ビンにフーリエ変換するフーリエ変換部と、前記フーリエ変換部によって変換された変換結果の各周波数ビンの値をノルムに変換するノルム変換部と、前記ノルムを周波数ビン毎に加算する加算部と、前記加算部によって加算された結果のピーク周波数を検出するピーク周波数検出部と、を具備することを特徴とする。
(もっと読む)
受信装置及びその方法並びにレーダ装置及びその受信方法
【課題】受信系のダイナミックレンジの拡大等を図る。
【解決手段】送信系20から目標に向けて送信信号を放射する。目標で反射されて戻る反射信号は、受信手段401で受信される。受信手段401から第1の受信系402及び第2の受信系403に入力される。基準信号発生器30から送信信号のデットタイム時に基準信号が第1の受信系402及び第2の受信系403に入力される。第1の受信系402及び第2の受信系403の振幅位相検出器27,37から出力される受信信号の振幅及び位相を振幅位相補正/選択器38で補正して基準信号の振幅値に基づいて第1の受信系402及び第2の受信系403のうちの1つを選択して受信信号の補正された振幅及び位相をRCS算出器28へ供給する。
(もっと読む)
無線センサ装置
【課題】移動体の有無と、移動体が存在する場合にはその移動体の方位とを同時に検知できる無線センサ装置を提供すること。
【解決手段】第1、第2及び第3の送受信アンテナ1L,1C,1Rと、第1、第2及び第3の検出用ダイオード3L,3C,3Rと、これら送受信アンテナ1L,1C,1R及び検出用ダイオード3L,3C,3Rにそれぞれパルス信号を供給するパルス発生器2と、第1の検出用ダイオード3Lの出力信号と第3の検出用ダイオード3Cの出力信号とが入力する第1の差動増幅回路4と、第2の検出用ダイオード3Rの出力信号と第3の検出用ダイオード3Cの出力信号とが入力する第2の差動増幅回路5と、第1の差動増幅回路4の出力信号と第2の差動増幅回路5の出力信号との和信号を検出する加算器11と、第1の差動増幅回路4の出力信号と第2の差動増幅回路5の出力信号との差信号を検出する減算回路12とを具備した無線センサ装置である。
(もっと読む)
障害物検出装置
【課題】車両周辺の障害物の位置・形状及びスペースを広範囲かつ正確に検出すること。
【解決手段】アレイ状に配置された素子から送信波を送信し、障害物での反射波を各素子で受信する。その受信信号を受信した時間から障害物の距離を算出し、各素子の受信信号の位相差から障害物の方向を算出する。また、広範囲で障害物を検出するために、各素子に入力する送信信号の位相差を適宜変えて、送信波の合成指向性を制御するとともに、各素子の受信信号に乗算する係数を適宜変えて、受信波の合成指向性を制御する。特に、隣接素子間に位相差を同相、逆相交互に設定することで、指向性を狭角、広角と交互に切り替え、広範囲の障害物の位置検出を可能とする。さらに、移動しながら検出した位置情報から、車両走行経路周辺の障害物の位置・形状及びスペースの認識を可能とする。
(もっと読む)
目標追尾装置
【課題】高分解能のレーダセンサによる観測情報の時系列データに基づいて、目標の位置、速度と同時に目標の長さを推定する際に、目標の長さを安定的に推定する目標追尾装置を提供する。
【解決手段】目標の位置、速度を推定する追尾フィルタである位置・速度推定部210と共に、目標の長さを推定する追尾フィルタである目標長さ推定部220を備える。位置・速度推定部210と目標長さ推定部220の間では、目標の位置、速度の各成分の平滑値と目標長さの平滑値を互いに相関させながら、目標の位置、速度と同時に目標の長さを推定する。
(もっと読む)
レーダ装置
【課題】超分解能測角処理時に、不要な他の信号が混入して誤った方位角が得られることがある。
【解決手段】複数目標との相対距離や相対速度を算出し、超分解能測角処理を行う演算装置13を用いて方位角を測定するレーダ装置において、前記演算装置13は、検出したある目標について、2つの方位角が得られた場合、検出した他の目標の中から、方位角が前記2つの方位角のいずれかに等しく、かつ上昇または降いずれかの変調時にビート信号の周波数が等しい目標を探す他信号検出処理を行い、前記他信号検出処理により、条件を満たす他の目標が検出された場合には、前記検出したある目標の2つの方位角のうち、他信号検出処理により検出された他の目標の方位角と等しい側の方位角を削除するようにした。
(もっと読む)
11 - 20 / 67
[ Back to top ]