
国際特許分類[G01S13/42]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818) | 物標の位置データを決定する方式 (1,263) | 距離とそれに類する他のものとの同時測定 (186)
国際特許分類[G01S13/42]の下位に属する分類
モノパルスレーダ,すなわち同時ロービング (119)
国際特許分類[G01S13/42]に分類される特許
31 - 40 / 67
レーダ方式
【課題】全周波数帯域での方位測定より分解能を向上する。
【解決手段】分解能は、周波数が高いほどビームの収束径が小さくなるので、受信波形に含まれる周波数成分から、高い周波数成分を抽出して方位測定をおこなうことにより高解像度で方位を得る。距離測定については、全周波数帯域を用いて高い距離分解能を得る。偶然高い周波数成分においてスペックルが発生した場合、イメージが乱れることになり重要な問題となる。この問題を回避するため受信波形に含まれる周波数を数帯域に分割して、各々の帯域でイメージ処理し、各帯域のイメージを選択するとともに、任意の帯域のイメージを合成することにより回避する。
(もっと読む)
レーダ装置

【課題】機械走査方式のレーダ装置における受光素子の数を低減して、装置のコストダウン、小型化を図ることが可能な機械走査方式のレーダ装置を提供する。
【解決手段】アンテナをモータで往復動させて走査する機械走査方式のレーダ装置であって、アンテナの反転、振り角をスリット板8と発光素子と受光素子を備えるエンコーダ7で検出する機械走査方式のレーダ装置において、エンコーダ7には、発光素子と、受光素子28を設け、スリット板8に設けるスリット4は、スリット板8の中心Cに対して左方向と右方向とで、パターンを非対称とした。パターンを非対称とするには、スリット板8の左端と右端でスリット数を変える、スリットの幅を左右で変える、等がある。
(もっと読む)
物体種別判定装置、物体種別判定方法、及び物体種別判定用プログラム
【課題】レーダによる検出結果に基づいて、車両等の物体の種別を適切に判定することができる物体種別判定装置、方法、及び物体種別判定用プログラムを提供する。
【解決手段】物体種別判定装置は、レーダ20により複数の方位角に電磁波を照射し、それぞれの方位角における物体の検出点を取得する検出点取得手段11と、取得された複数の検出点のうち、同一の物体についての検出点であると想定される検出点をグループ化して、点列データとして抽出する点列データ抽出手段12と、抽出された点列データが、方位角が増加又は減少するに従って、検出点のレーダ20からの距離が直線的に減少する第1の状態から直線的に増加する第2の状態に切り替わる変位特性を有するか否かを認識する変位特性認識手段13と、変位特性認識手段による認識結果に応じて、点列データが抽出された物体の種別を判断する種別判断手段14とを備える。
(もっと読む)
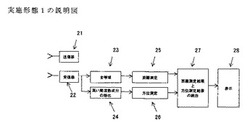
レーダ信号処理装置およびレーダ信号処理方法
【課題】レーダ装置はできるだけ多くの信号を、できるだけ短時間での処理が要求され、信号の要求精度を落とさずに高精度の高分解能処理の削減で負荷を削減する。
【解決手段】目標物からの反射波をアンテナで受信してA/D変換部でディジタル化し、時間フーリエ変換部でドップラー周波数次元に変換して目標物の相対速度を算出し、ドップラー周波数次元の信号に対しピーク検出部で受信レベルのピーク検出を行い距離ゲートまたは相対速度情報から信号の重要度を重要度判定部で判定して、データ並び替え部で重要度順に並び替え、この各信号と重要度を、異なる複数の高分解能処理方法における演算精度および所定数の信号の処理時間を処理方法との組合せ毎に格納されたデータベースと照合し、各信号と高分解能処理方法とをデータ割当て部で対応させ、高分解能処理部で角度または距離を算出する。
(もっと読む)
目標高度計測方法、目標高度計測方式及びレーダ装置
【課題】距離と方位角のみを計測する従来の二次元レーダにより等高度で等速直線運動する目標の高度を推定する。
【解決手段】距離と方位角のみを計測する従来の二次元レーダにおいても、等高度で等速直線運動を行う目標について、3スキャン分の目標の検出距離と検出方位角を用いて目標の高度を推定する。
(もっと読む)
物体検知装置
【課題】基準走査方向に存在する物体の検知可能距離を確保し、かつこの基準走査方向から外れた位置に存在する物体の検知能力を確保することができる物体検知装置を提供する。
【解決手段】レーダ装置1は、水平方向に分割した検知領域毎に、その検知領域における存在を検知したい物体の距離範囲に応じて垂直方向の走査範囲を変化させる。例えば、水平方向における基準走査方向を正面前方に決定している場合、この基準走査方向から離れるにつれて、レーザ光の垂直走査範囲を大きくする。これにより、レーダ装置1は、水平方向における走査角度毎に、その走査角度において、存在を検知したい物体の距離範囲で、垂直方向におけるレーザ光の照射範囲をほぼ同じにする。
(もっと読む)
物体検出装置
【課題】検出時刻が異なる場合でも、物体の同じ部位の位置情報を取得することにより、より精度良く物体の位置情報を導出することができる物体検出装置を提供する。
【解決手段】物体検出装置10において、レーダ14が放射電磁波の反射波に基づいて他車両等200の物体の物標点を検出し、形状推定部26cが、レーダ14が検出した物標点に基づいて他車両200の少なくとも側面と前面とを推定し、位置情報導出部26dが、形状推定部26cが推定した側面と前面とから特定される代表点から他車両200の位置情報を導出する。これによれば、レーダ14の物標点の検出情報から検出誤差の影響を排除した生成情報である他車両200の側面及び前面を推定し、検出誤差を含む物標点そのものではなく、検出誤差に影響されない生成情報を利用するため、他車両200の特定部位の位置情報の時間変化を導出することができる。
(もっと読む)
複合モードレーダ装置
【課題】狭帯域レーダと広帯域レーダとを一体化して協調動作させることで、高性能で高機能な角度測定手段を実現する複合モードレーダ装置を提供する。
【解決手段】複合モードレーダ装置100は、狭帯域レーダ部102と広帯域レーダ部103とが同じ筐体内に設けられており、演算部101からの制御で両者が協調して動作するように構成されている。また、狭帯域レーダ部102及び広帯域レーダ部103で測定されたデータはともに演算部101に入力され、両者から入力した検知データをもとに演算部101で測角を高精度に行えるようにしている。狭帯域レーダ部102は第1の周波数を中心周波数とする狭帯域信号を、また広帯域レーダ103は第2の周波数を中心周波数とする広帯域信号を、それぞれ角度測定に用いている。
(もっと読む)
複合モードレーダ装置
【課題】狭帯域レーダと広帯域レーダとを併用して協調動作させることで、高精度な位置測定を可能とするとともに、他システムとの干渉を低減させた複合モードレーダ装置を提供する。
【解決手段】複合モードレーダ装置100は、狭帯域レーダ部102と広帯域レーダ部103とが同じ筐体内に設けられており、演算部101からの制御で両者が協調して動作するように構成されている。また、狭帯域レーダ部102及び広帯域レーダ部103で測定されたデータはともに演算部101に入力され、両者から入力した測定データをもとに演算部101で測距を高精度に行えるようにしている。
(もっと読む)
レーダ装置
【課題】物体までの距離や物体とレーダ装置との相対速度が変化する環境においても、波数推定を正確に行うレーダ装置を提供する。
【解決手段】電波を送信する送信部と、電波を受けた物体から反射される電波を受信する複数のアンテナと、複数のアンテナから供給される受信信号に応じて、物体に反射される電波の反射波強度の角度スペクトラムを算出し、角度スペクトラムにおいて設定される閾値を越える部分をカウントすることにより到来する電波の波数を推定し、推定された波数と複数のアンテナから供給される受信信号とに応じて、測角方法を用いて物体の存在する方向を判定する信号処理部とを有するレーダ装置であって、信号処理部は、複数のアンテナから供給される受信信号に応じて、電波を反射する物体までの距離を算出し、算出された距離に応じて閾値を設定する。
(もっと読む)
31 - 40 / 67
[ Back to top ]