
国際特許分類[G01S13/86]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ方式と非レーダ方式,例.ソーナ,方位測定機,との結合 (221)
国際特許分類[G01S13/86]に分類される特許
31 - 40 / 221
走行支援装置
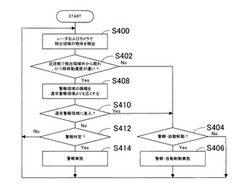
【課題】車両の前方の検出領域において、車両の進路に向かって横方向から検出領域に進入した物体を極力速く検出して警報を指令するとともに、誤検出を考慮して不適切な衝突回避の実行を防止する走行支援装置を提供する。
【解決手段】走行支援装置は、検出領域の外部から検出領域に、車両の進路に向かって横方向から進入した物体の横移動速度が所定速度以上であり、かつ物体と車両との距離が所定距離以下である場合(S402:Yes)、検出領域の範囲内で通常警報領域の側方に通常警報領域よりも横方向に広がる拡張警報領域を設定する(S408)。車両支援装置は、通常警報領域の外部の拡張警報領域の範囲内であれば(S410:No)、運転者によりブレーキ操作およびステアリング操作がなされておらず、車両と物体との衝突予測時間が所定の警報時間以下の場合(S412:Yes)、運転者に対する警報だけを車両制御ECUに指令する(S414)。
(もっと読む)
航法補完装置およびレーダ装置

【課題】本発明は、レーダ装置によって行われた測距または測位の結果を他のレーダ装置によって行われた測距または測位の結果で補完する航法補完装置と、その航法補完装置の機能を所定の機能分散の下で実現するレーダ装置とに関し、従来例に比べて構成が大幅に変更されることなく、至近点に位置する目標の裏に生じる死角を緩和し、または回避できることを目的とする。
【解決手段】異なる位置で距離または位置の測定を個別に行う第一のレーダ装置と第二のレーダ装置との間における連係を通信路を介して行う連係手段と、前記第一のレーダ装置および前記第二のレーダ装置の内、一方によって行われた測定の結果を他方によって行われた測定の結果で補完する補完手段とを備る。
(もっと読む)
センサを用いた追突事故防止装置
【課題】速度のみが検出可能な非接触式のミリ波センサの出力情報のみで、追突事故を防止するために運転手に警報を与えるシステムを比較的安価に提供する。
【解決手段】複数のミリ波センサにより、同一方向の目標物との相対速度が測定可能な構成となっていて、かつ各々のミリ波センサの検出範囲を異なるものとし、最も遠くから検出できるミリ波センサから順に判定用の速度閾値を小さくなるようにあらかじめ設定し、各々のミリ波センサで計測した速度がそれぞれ設定された閾値以上であるか判定し、閾値以上であった場合には追突する可能性があると判定するように構成した。
(もっと読む)
角速度推定装置及びコンピュータプログラム及び角速度推定方法
【課題】移動体の角速度を精度よく推定する。
【解決手段】周辺物体観測装置811(レーダ)は、移動体の周辺に存在する物体について、移動体を基準とした物体の相対位置を繰り返し観測する。相対位置取得部211は、周辺物体観測装置811が観測した観測結果を取得する。静止物体判定部220(停止物識別部)は、周辺物体観測装置811が相対位置を観測した物体が静止しているか否かを判定する。物体相関部230(停止物用追尾部)は、周辺物体観測装置811が観測した複数の相対位置のなかから、同一の物体について周辺物体観測装置811が観測した複数の相対位置を判定する。角速度推定部(状態推定部240、軌道推定部)は、移動体の角速度を推定する。
(もっと読む)
測距・通信複合システム
【課題】測距機能と通信機能とを一体化して処理可能な測距・通信複合システムを提供する。
【解決手段】本発明の測距・通信複合システム1は、送信部2と受信部3から構成されており、測距と通信の2つの機能を統合化している。送信部2は、送信回路4、搬送波変調手段5、及び送信アンテナ6から構成されており、受信部3は、受信回路7、検波器8、低雑音増幅器(LNA)9、及び受信アンテナ10から構成されている。送信回路4で行われるデータ変調は、PPM方式を用いている。また、受信回路7は測距と通信の復調処理を並列して行えるよう、測距回路11と通信回路12を別々に設けている。
(もっと読む)
車両の周辺監視装置
【課題】レーダデータと赤外線カメラデータの同期ずれを補正する。
【解決手段】車両の周辺の物体を検出するレーダと、車両の周辺の画像を撮像するカメラと、を備える車両周辺監視装置において、レーダが検出した物体の位置に対応する、カメラが撮像した対応画像上の所定領域を特定して当該所定領域内の前記物体を特定する手段とを備え、特定された対応画像上の所定領域の移動量の時間変化と、カメラが撮像した画像上での所定物体の移動量の時間変化との位相ずれ量を算出する手段と、位相ずれ量がゼロになるように、レーダまたはカメラの出力信号の位相補正をおこなう位相補正手段と、を有する。
(もっと読む)
先行車位置判定装置
【課題】GPSによる相対距離および相対速度等の位置情報と、自律センサによる位置情報とを比較して先行車両を特定する際に、複数の他車両が存在する場合はGPSによる位置情報の誤差に応じて比較の閾値を変化させることで、より厳密に先行車を特定することができる先行車位置判定装置を提供することを課題とする。
【解決手段】ECUは、自車両と当該自車両前方を走行する他車両との相対位置に関する相対位置情報、および、当該相対位置の誤差に関する誤差情報を取得し、自車両の直前を走行する先行車の位置を検出し、取得された相対位置情報に基づく相対位置と、検出された位置とを比較して先行車の位置を特定し、複数の他車両の相対位置情報が取得された場合、取得された相対位置情報に基づく相対位置と、検出された位置とを、誤差情報に応じて変化させた閾値を用いて比較して先行車の位置を特定する。
(もっと読む)
距離測定装置及び飛翔体位置測定装置
【課題】 鳥類等の飛翔体までの距離及び位置を簡易に測定する。
【解決手段】 レーザー距離計10の接眼レンズ11にリレーレンズ20を介してビデオカメラ30を装着した構成であり、レーザー距離計10の接眼レンズ11に表示される飛翔体の画像をビデオカメラ30のモニタ画面31に表示させることができる。従って、観測者は、レーザー距離計10の接眼レンズ11をのぞき込み、アイポイント位置を保ちながらレーザーを照射する必要はなく、ビデオカメラ30のモニタ画面31を見ながら、レーザー距離計10を操作して飛翔体を追尾でき、飛翔体を追尾しながらのレーザー照射作業が容易となる。
(もっと読む)
位置推定装置およびプログラム
【課題】無線信号を送信する送信装置の位置を高精度で推定することのできる位置推定装置およびプログラムを得る。
【解決手段】入館管理装置20により、RFIDタグ52の位置を送信された無線信号に基づいて推定し、かつ当該推定対象とする領域を撮影するカメラ40によって得られた画像情報に基づいて前記領域に存在する人の位置を導出し、少なくとも推定したRFIDタグ52の位置を入力情報とし、補正後のRFIDタグ52の位置を示す物理量を出力情報とし、当該出力情報の正解情報を用いた学習機能を有するニューラル・ネットワークにより得られた物理量を用いて、推定したRFIDタグ52の位置を補正する一方、位置の推定対象としたRFIDタグ52の所持者が、位置の導出対象とした人とみなされる予め定められた条件を満足した場合に、導出した前記人の位置を示す物理量を前記正解情報としてニューラル・ネットワークを学習させる。
(もっと読む)
物体検出装置
【課題】カメラとレーダ等の複数のセンサを用いて物体を検出する物体検出装置において、複数のセンサから得られる情報を利用して検出精度を向上する。
【解決手段】光、電波、超音波の少なくとも一つの信号により物体を計測する少なくとも二つの計測部と、該計測部から得られる出力信号を処理する処理部2を具備する物体検出装置1において、前記少なくとも二つの計測部は、少なくとも二つの互いに異なる計測原理で構成される計測部であって、前記複数の計測部から得られる複数の出力信号を、共通の処理系のメモリに格納する取込手段を具備し、前記出力信号を、前記複数の計測部から得られる出力信号を共通の処理部2で処理する。
(もっと読む)
31 - 40 / 221
[ Back to top ]