
国際特許分類[G01S13/86]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ方式と非レーダ方式,例.ソーナ,方位測定機,との結合 (221)
国際特許分類[G01S13/86]に分類される特許
11 - 20 / 221
車両用物体検知装置
【課題】自車両の外部に存在する物体の静止および移動の状態を精度良く検知する。
【解決手段】車両用物体検知装置10は、レーダ装置12から発信された電磁波の物体上における反射点の位置を算出する反射点算出部21と、自車両から物体までの距離を算出する距離算出部22と、反射点の位置に基づき物体の水平方向の両方の端点を検出する端点検出部23と、検知対象物の何れか一方の端点が自車両から見て比較対象物に重なっているか否かを判定する重なり判定部24と、重なり判定部24により重なっていると判定され、かつ、時間経過と共に検知対象物までの距離が比較対象物までの距離よりも近くなった場合に、検知対象物の前記比較対象物に重なっていない他方の端点の横移動量に基づいて検知対象物の横移動速度を算出する端点移動速度算出部25とにより、検知対象物の横移動速度の検出精度を向上させる。
(もっと読む)
地中レーダ

【課題】地中の埋設物を探知する地中レーダシステムにおいて、地中レーダのオペレータの探査作業の効率化や探査データの品質を向上する。
【解決手段】地中に向けて電磁波を送出する電磁波送信部5と、送出された電磁波の反射波を受信する電磁波受信部6とを備えたレーダ本体2を有し、電磁波受信部6により受信された電磁波に基づく受信波データから地中に埋設された埋設物11を探査する地中レーダ1において、探査エリアでのレーダ本体2の二次元的な位置を測定する位置測定部3と、レーダ本体2の移動方向の情報を取得する方向測定部4と、探査エリアの探査時に、電磁波受信部6により受信した電磁波に基づく受信波データと、位置測定部3により取得された二次元位置データと、方向測定部4により取得された移動方向情報とを一単位の探査データとし、探査データを探査位置毎にそれぞれ記憶する記憶部8と、を備えて構成する。
(もっと読む)
物体識別装置、および物体識別プログラム
【課題】車両の進行方向に存在する物体を識別する物体識別装置において、物体を識別する際の処理負荷を軽減できるようにする。
【解決手段】衝突防止システムにおいては、レーダ装置から物体の位置および反射波の強度を含む物体情報を取得し(S110、S120)、進行方向を撮像した撮像画像を取得する(S130)。そして、物体情報に基づく反射波の強度に応じて、撮像画像中の物体を識別する際の画像処理手法を、予め設定された複数の画像処理手法の中から選択し(S140)、選択された画像処理手法を実施することで、取得した撮像画像中に存在する物体を識別し、この識別結果を出力する(S210〜S370)。このシステムによれば、物体からの反射波の強度に応じて、進行方向に存在する物体をある程度区別し、区別した物体に適した画像処理手法を選択することができるので、画像処理によって正確に物体を識別でき、処理負荷を軽減できる。
(もっと読む)
衝突回避装置、ヘリコプタ、及び衝突回避プログラム
【課題】ヘリコプタが障害物に近接した状態でも、ヘリコプタの障害物への衝突を回避する飛行を可能とする、ことを目的とする。
【解決手段】ヘリコプタ10は、GPS受信部34によって、受信したGPS信号に基づいて自機の位置を検知し、距離センサ18によって、自機と周囲の障害物との距離を測定する。そして、ヘリコプタ10は、詳細情報生成部40によって、地図情報記憶装置52に記憶されている地図情報から距離センサ18で検知した自機の位置を含む自機周囲情報を読み出し、読み出した自機周囲情報と距離センサ18による測定結果とから、自機の周囲の形状を示す自機周囲詳細情報を生成し、飛行制御部32によって、自機周囲詳細情報と自機の大きさとに基づいて、自機が障害物へ衝突することを抑制するための制御を行う。
(もっと読む)
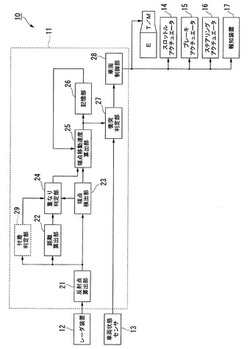
目標検出装置
【課題】 複数種類のセンサを組み合わせて双方の目標検出情報に基づいて目標検出の閾値を可変調整することにより、目標からの反射波あるいは物理的なエネルギー波の強度が低い目標の場合でも、目標の検出を可能にする。
【解決手段】 第1のセンサからの受信信号を入力し、該受信信号より目標を検出し、第1の目標検出情報を出力する第1の目標検出器と、第1の目標検出器とは異なる物理的性質をもつ第2のセンサからの受信信号を入力し、該受信信号より目標を検出し第2の目標検出情報を出力する第2の目標検出器と、第1の目標検出器及び第2の目標検出器からの目標検出情報を入力とし、最終的に目標が存在するか否かを判定し、判定結果を出力するとともに、判定結果に基づき、修正された目標検出のための閾値を第1の目標検出器並びに第2の目標検出器に対して出力する目標探知判定器を備える。
(もっと読む)
物体検出装置及び物体検出方法
【課題】誤結合検出を防止することにより、物体検出精度を向上させることができる、物体検出装置及び物体検出方法を提供すること。
【解決手段】物体検出装置200において、検出物体領域補正部103が、基準画像平面内の座標群と、レーダによって検出された、各座標における検出移動速度とが対応付けられた移動速度マップ情報に基づいて、検出物体領域設定部102によって設定された検出物体領域を補正する。こうすることで、検出物体領域が誤結合の結果として得られたものであっても、その検出物体領域を移動速度マップ情報を用いて修正することができる。この結果、物体検出精度を向上させることができる。
(もっと読む)
車両の物体検出装置
【課題】物体の検出精度の低下や誤検出が少なく、認識精度を向上できる車両の物体検出装置を提供する。
【解決手段】ミリ波レーダセンサ4は、車両1の前方の物体2を検知し、送信波と受信波とのビート信号からピーク周波数を検出する。他車情報演算処理部11は、車車間通信又は路車間通信によって取得した他車両3の位置及び速度と、自車位置センサ5及び自車速センサ6によって取得した車両1の位置及び速度とから他車両3と車両1との参照距離及び参照相対速度を求める。判定処理部12は、ミリ波レーダセンサ4が検出したピーク周波数から、参照距離と参照相対速度とに相当するピーク周波数を探索し、探索できた場合は物体2を他車両3と判定する。物体情報演算処理部13は、他車両3と判定した物体2のピーク周波数を除いたピーク周波数から、他車両3と判定した物体2を除く物体2と車両1との距離及び相対速度を演算する。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置は、全方位に亘って同一PRIを使用しているため、見通し外となる範囲を含む方位に対しても同一PRIを使用し、時間的リソースを有効に使用できていない。
【解決手段】 この発明のレーダ装置は、自己位置を検出する自己位置検出部と、前記自己位置検出部で検出した自己位置周辺の地形データを記憶する地形データベースと、前記地形データを用い前記自己位置を中心とした方位毎の見通し距離を算出し、当該見通し距離に基き方位毎のPRI(Pulse Repetition Interval)を算出する算出部と、前記方位毎のPRIに基いて、各方位に向けて前記方位に関連付けされたPRIの電波を放射する送信制御部とを備えるようにした。
(もっと読む)
レーダ装置
【課題】検知範囲の変更が可能で、而も小型化を可能としたレーダ装置を提供する。
【解決手段】中心に設けられる信号処理ユニット2と、該信号処理ユニットに組込まれ、ホーン型送受信アンテナ6を有する少なくとも1つの高周波ユニット3とを具備し、前記信号処理ユニットは円周方向に等角度で順次傾斜する側面を有し、内部に信号処理部を有すると共に前記側面には前記信号処理部に接続されたソケットが設けられ、前記高周波ユニットは上下に縦長の送信用アンテナ開口21と受信用アンテナ開口22とを有すると共に前記ソケットに嵌合するコネクタとを有する。
(もっと読む)
レーダ断面積の計測方法、及びレーダ断面積の計測装置
【課題】 レーダ断面積計測を実施する際に、計測目標と対比するための既知のレーダ断面積を有する基準目標のレーダ反射特性のみを計測し、校正の基準となる信号源からの放射信号を用いた校正を実施することで、高精度に計測目標のレーダ断面積を計測する。
【解決手段】 送受信アンテナから等距離となる位置に、基準目標以外の不要物が存在しないように、送受信アンテナからの距離が気球とは異なる位置で、基準目標を気球に懸吊して、そのレーダ断面積を計測するとともに、基準信号送信ユニットを気球に取り付けて、基準信号送信ユニットからの信号を用いて、レーダ断面積の計測値の校正を行う。
(もっと読む)
11 - 20 / 221
[ Back to top ]