
国際特許分類[G01S13/86]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ方式と非レーダ方式,例.ソーナ,方位測定機,との結合 (221)
国際特許分類[G01S13/86]に分類される特許
41 - 50 / 221
ハンドヘルド測地デバイスによるグラフィクス支援遠隔位置測定
【課題】付加的な設置機器を使用せずに、位置を計測することが可能である測地デバイスを提供すること。
【解決手段】関心のある地点の位置を決定する装置であって、複数の衛星からの位置データを受信する少なくとも1つのアンテナと、該少なくとも1つのアンテナに結合される少なくとも1つの受信機と、画像データを獲得する画像化回路であって、該画像化回路は、光学センサと光軸とを含む、画像化回路と、配向データを獲得する配向回路と、該画像データおよび該配向データの表現を表示して、該装置を位置決定する際に使用者を支援するディスプレイと、該位置データ、該画像データおよび該配向データに少なくとも基づいて、該関心のある地点の該位置を決定する位置決定回路とを含む、装置。
(もっと読む)
物体検出装置

【課題】レーダによって取得されるレーダ物標情報とカメラによって取得される画像物標情報とをフュージョンさせることで物体を検出する物体検出装置において、物体の検出精度をより向上させる。
【解決手段】レーダによって認識された物標の位置から、レーダの受信波の強度に応じて設定された所定の横幅の範囲内にある画像物標情報のみを用いて、レーダ物標情報と画像物標情報とをフュージョンさせる。
(もっと読む)
新規なセンサフュージョン手法を用いた、移動体の状態推定のための装置、方法、およびプログラム
【課題】さまざまな異なる環境に適用できる状態推定系を実現する。
【解決手段】系の状態を推定するための装置であって、(a) ひとつ以上の第一のセンサと、(b) ひとつ以上の第二のセンサと、(c) ひとつ以上の第一のセンサのいずれかから各々が出力を受けて記憶手段に格納する複数の下位モジュールとを含み、下位モジュールが有する記憶手段は下位モジュールの各々に対応する地図と、系の状態を推定するための情報でありひとつ以上の第二のセンサのいずれかの出力から生成され第一のセンサのいずれかの出力と地図とに基づいて更新をされる第一のデータセットとを有し、さらに(d) 複数の下位モジュールの各々から出力された第一のデータセットを受けとり下位モジュールの各々に第一のデータセットの改善を行わせ第一のデータセットを統合し系の状態を推定して下位モジュールの各々へフィードバックする上位モジュールを含む。
(もっと読む)
目標追跡装置
【課題】追跡精度を向上させることができる目標追跡装置を提供する。
【解決手段】目標を追跡するアクティブセンサ3からの観測値に基づく目標航跡と、目標の角度を測定するパッシブセンサ1からの観測値に基づく目標航跡とが同一目標を示していると判定した場合にこれら2つの目標航跡のデータ融合を行ってデータ融合航跡として出力するデータ融合部5と、データ融合部からのデータ融合航跡に基づいて、パッシブセンサからの観測値を入力して目標の航跡を算出するための補正情報を算出する補正情報算出部6aと、パッシブセンサからの観測値と補正情報算出部からの補正情報に基づいて、目標の航跡を算出して目標航跡として出力するパッシブセンサ処理部2aを備える。
(もっと読む)
物体検出システム
【課題】レーダー及び立体視センサーを含む物体検出システムを提供する。
【解決手段】物体検出システムは、レーダー信号が送信される少なくとも一つの開口及び反射したレーダー信号が受信される少なくとも一つの開口を備えるレーダーシステムを含む。検出システムは、第1のセンサー及び第2のセンサーを含む立体視システムも含む。第1のセンサー及び第2のセンサーは、オフセットにより分離される。立体視システムは、単一のアセンブリを形成するためにレーダーシステムに取り付けられる。レーダーシステムは、第1のセンサーと第2のセンサーとの間のオフセット内に設置される。
(もっと読む)
レーダ装置
【課題】周波数ホッピングの実行の有無にかかわらず、DBF方式レーダおよびモノパルス方式レーダへの適用が可能で、かつ低演算量なMLEを用いる測高法を実現したレーダ装置を得る。
【解決手段】アンテナ1からの受信信号から複数チャネルの受信信号を生成する受信機2と、複数チャネルの受信信号からディジタル信号に変換した複数チャネルの受信信号ベクトルを出力するAD変換器3と、受信信号ベクトル、ビーム指向方向情報、目標距離情報、目標高度想定範囲および海面反射係数想定範囲を入力情報として、目標の測高値を算出する目標測高手段4とを備えている。目標測高手段4は、受信信号ベクトルから相関行列を算出する手段と、各種情報からアレーマニフォルドを算出する手段と、相関行列およびアレーマニフォルドから測高値を算出する手段とを含む。
(もっと読む)
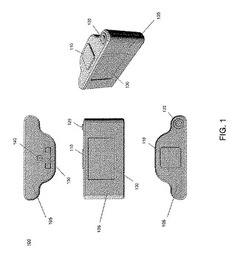
レーダ装置
【課題】物体の左右方向及び上下方向の少なくとも一方の位置を正確に検出することの可能なレーダ装置の提供。
【解決手段】レーダ装置100は、左右方向に配列され、少なくとも一部が上下方向にずれて配設された複数(ここでは、3個)の素子アンテナ(21、22、23)を有する受信アンテナ2と、位置検出ECU(5)と、を備える。また、位置検出ECU(5)は、前記複数の素子アンテナ(21、22、23)で受信された受信信号の位相差に基づいて、物体TGの上下方向位置P1を検出する第1位置検出部53と、上下方向位置P1の履歴に基づいて、該上下方向位置P1を補正して、補正後の上下方向位置である第1補正位置P1Aを求める第1位置補正部(54)と、を備える。
【選択図】図2 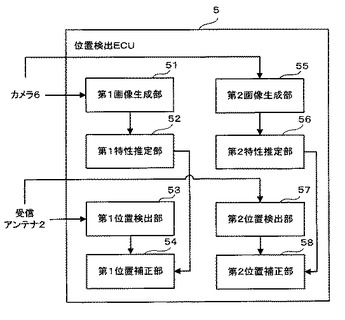 (もっと読む)
(もっと読む)
物体検出装置、情報処理方法、および、情報処理システム
【課題】カメラで撮影した画像内の物体の種類を判定する場合の電子制御装置の処理負荷を軽減する技術を提供する。
【解決手段】レーダ装置により検出したレーダ情報に基づいて、物体の種類を予測する。その予測した物体の種類をもとにカメラで撮影した1フレームの画像の所定の画像範囲を切り出して、電子制御装置により物体の種類判定を行う。これにより電子処理装置の画像による物体の種類判定の処理負荷が軽減される。
(もっと読む)
電波発射源可視化装置
【課題】電波発射源可視化装置において、特に近距離の電波発射源をカメラ画像中から特定する際にも、良好な位置精度を維持できる電波発射源可視化装置を得る。
【解決手段】アレイアンテナ部11の中心軸に沿って前方にレーザ光を照射し、このレーザ光の照射された位置をカメラ画像の撮像視野の中心となるようにカメラ部13の撮像方向を調整して両者の軸合わせを行った後、電波到来方向を推定した2次元の波源画像とカメラ画像とを重ね合わせて、電波発射源可視化画像を得る。
(もっと読む)
マルチラテレーション装置及びこれを用いた空港面監視システム
【課題】 空港面監視システム内の目標検出装置であるMLAT装置は、複数の受信機2で受信しその時間差から目標(航空機)の位置を特定する。このため受信機数が多いと、受信機の組合せ数により多数の検出位置解が発生し、特に1つ以上の検出位置解がマルチパス等により大きく外れると検出位置がばらついてしまう。
【解決手段】航空機5が通過予定である経路のセンターライン位置情報を利用するためセンターラインDB14に蓄積する。複数の検出位置解から検出位置を特定する際に、基準となるセンターラインから各検出位置解までの距離に応じて重み付けを行ない位置座標を特定する。この結果検出位置のばらつきが押さえられ、検出位置精度が向上する。また、他の目標検出装置が検出した位置座標と統合する以前に早い段階で、MLAT装置1にて検出精度が向上するので、管制官の負担を軽減した空港面監視システムを構築できる。
(もっと読む)
41 - 50 / 221
[ Back to top ]