
物体検出装置、情報処理方法、および、情報処理システム
【課題】カメラで撮影した画像内の物体の種類を判定する場合の電子制御装置の処理負荷を軽減する技術を提供する。
【解決手段】レーダ装置により検出したレーダ情報に基づいて、物体の種類を予測する。その予測した物体の種類をもとにカメラで撮影した1フレームの画像の所定の画像範囲を切り出して、電子制御装置により物体の種類判定を行う。これにより電子処理装置の画像による物体の種類判定の処理負荷が軽減される。
【解決手段】レーダ装置により検出したレーダ情報に基づいて、物体の種類を予測する。その予測した物体の種類をもとにカメラで撮影した1フレームの画像の所定の画像範囲を切り出して、電子制御装置により物体の種類判定を行う。これにより電子処理装置の画像による物体の種類判定の処理負荷が軽減される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ装置により検出した物体情報と画像情報を用いて車両制御を行う技術に関する。
【背景技術】
【0002】
一般に、レーダ装置はアンテナから送信した電波などの信号が車外の物体からはね返り、そのはね返った信号をアンテナが受信する。アンテナから送信した信号とアンテナで受信した信号との時間差とドップラーシフトの情報に基づいて、車両と車外の物体間の距離と、車両からみた物体の速度と、車両からみた車外の物体の角度と、車外の物体から受信した受信波の反射強度とを検出できる。
【0003】
しかし、レーダ装置のみを用いて物体を検出する場合、物体から跳ね返った受信波の情報とノイズの情報とを区別するために所定の閾値を設定し、閾値を超える反射強度を有する信号を物体として検出する。その結果、反射強度が強い車両やガードレールなどの物体の検出は可能であるが、反射強度が弱い人を検出することは難しいという問題がある。そのため、反射強度が弱い人を検出するためには、物体を検出するための閾値を下げる必要があるが、閾値を下げた場合、ノイズの情報も物体として検出してしまい、誤った車両制御を行うという問題があった。
【0004】
また、車両にカメラを備えた画像処理装置を搭載して、カメラで撮影した1フレームごとの画像情報を走査して画像中の物体の種類を判別する技術がある。
【0005】
カメラを備えた画像処理装置のみにより物体を検出する場合、物体の種類の判別は可能であっても、相対速度の検出はできないことから、車両と物体とが衝突するまでの時間を検出することができず、衝突を回避する車両制御を行うことが困難であった。また、1フレームごとに画像の全領域について車両制御の対象となる物体を検出するための走査処理を行う必要があることから、車両に搭載されて画像の物体の種類判定を行う電子制御装置のCPUの処理負荷が大きくなり、迅速な車両制御ができないという問題があった。
【0006】
このようなレーダ装置のみを用いた場合、または、カメラのみを用いた場合の問題を解決するために、レーダ装置とカメラを備えた画像処理装置とを組み合わせて、車外の物体の距離、角度、相対速度、および、物体の種類を判別して、車両と物体との衝突を回避する車両制御を行う技術がある。
【0007】
また、レーダ装置と画像処理装置との情報を組み合わせて画像処理を行う場合、レーダ装置で検出した対象物の距離情報を用いて、カメラで撮影した画像処理範囲を限定する技術が開示されている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平9−264954号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、レーダ装置とカメラを用いた画像処理装置とを組み合わせて物体を検出する場合でも、1フレームごとに画像の全領域について車両制御の対象となる物体を検出するための走査処理を行う必要があることから、電子制御装置のCPUの処理負荷が大きくなり、迅速な車両制御ができないという問題があった。
【0010】
また、特許文献1記載の技術では、白線と車両を対象物とした場合に、1フレーム内の対象物の画像を含む所定範囲を画像処理の対象とすることで、画像処理負荷を軽減することについては記載されているものの、対象物の種類ごとにその対象物の大きさに応じて異なる範囲を画像処理することについては考慮されておらず、画像処理負荷が大きくなっていた。
【0011】
本発明は、上記課題に鑑みてなされたものであり、OLE_LINK1電子制御装置の画像処理負荷を軽減して車両制御を迅速に行う技術OLE_LINK1を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記課題を解決するため、請求項1の発明は、車両に設けられ前記車両外の物体の位置と速度を検出するレーダ装置からのレーダ情報と、前記車両に設けられ前記レーダ装置の検出範囲と重なる領域を撮像するカメラで得られた画像とに基づいて、前記車両外の検出対象を検出する物体検出装置であって、前記レーダ情報に基づいて、前記候補物体の種類を予測する予測手段と、前記レーダ情報に基づく前記検出対象の候補物体の前記画像中の座標を導出する導出手段と、前記画像中における前記候補物体の導出された座標の周辺の、当該候補物体の予測された種類に応じたサイズの領域を処理対象領域に設定する設定手段と、前記画像中の前記処理対象領域のみを対象に前記検出対象を検出する検出手段と、を有することを特徴とする物体検出装置。
【0013】
また、請求項2の発明は、請求項1記載の物体検出装置において、前記検出手段は、前記処理対象領域から前記検出対象を検出するときに、当該処理対象領域に対応する前記候補物体の予測された種類に応じた判定手法を用いることを特徴とする物体検出装置。
【0014】
また、請求項3の発明は、請求項1または2記載の物体検出装置において、前記車両の走行状況を示す走行情報を取得する取得手段と、前記走行情報に基づいて、前記レーダ情報に基づく前記候補物体の一部を処理対象として選択する手段、をさらに備えることを特徴とする物体検出装置。
【0015】
また、請求項4の発明は、請求項1乃至3のいずれか記載の物体検出装置において、前記導出手段、前記予測手段、前記設定手段、および、前記検出手段のうち少なくとも1の手段は、前記レーダ情報に基づく前記候補物体が複数あるとき、複数の前記候補物体のうちの前記車両との距離の近い順から処理対象とすることを特徴とする物体検出装置。
【0016】
また、請求項5の発明は、車両に設けられた前記車両外の物体の位置と相対速度を検出するレーダ装置からのレーダ情報と、前記車両に設けられ前記レーダ装置の検出範囲と重なる領域を撮像するカメラで得られた画像とに基づいて、前記車両外の検出対象を検出する物体検出方法であって、前記レーダ情報に基づいて、前記候補物体の種類を予測する工程と、前記レーダ情報に基づく前記検出対象との候補物体の前記画像中の座標を導出する工程と、前記画像中における前記候補物体の導出された座標の周辺の、当該候補物体の予測された種類に応じたサイズの領域を処理対象領域に設定する工程と、前記画像中の前記処理対象領域のみを対象に前記検出対象を検出する工程と、を有することを特徴とする物体検出方法。
【0017】
また、請求項6の発明は、物体検出システムであって、車両に設けられ前記車両外の物体の位置と速度を検出するレーダ装置と、前記車両に設けられ前記レーダ装置の検出範囲と重なる領域を撮像するカメラと、レーダ装置からのレーダ情報と、カメラで得られた画像とに基づいて、前記車両外の検出対象を検出する請求項1ないし4のいずれかに記載の物体検出装置と、を備えることを特徴とする物体検出システム。
【発明の効果】
【0018】
請求項1ないし6の発明によれば、電子制御装置が行う画像処理は検出対象とする物体が存在する画像領域に限定され、物体を検出する画像処理負荷を軽減するとともに、レーダ装置の処理を含めた物体検出システム全体の処理負荷の軽減が可能となる。また、電子制御装置の処理負荷軽減により、物体に対する車両制御を迅速に行うことができる。
【0019】
また、特に請求項2の発明によれば、レーダ装置からの情報により予め物体の種類を予測することで、電子制御装置による物体の種類判定を何度もやり直す必要はなく物体の種類判定が迅速に行える。さらに、電子制御装置の処理負荷軽減により、物体に対する車両制御を迅速に行うことができる。
【0020】
また、特に請求項3の発明によれば、車両の走行状況を示す走行情報をレーダ装置の情報とあわせて用いることで、車両が走行する状況に応じて、処理対象とする候補物体を選択できる。これにより、電子制御装置の処理負荷が軽減されるとともに、車両の走行状態に応じた車両制御を迅速に行うことができる。
【0021】
また、特に請求項4の発明によれば、車両制御の対象となる可能性の高い物体から順に検出することができ、ドライバーなど車両の乗員の安全確保を迅速に行うことが可能となる。
【図面の簡単な説明】
【0022】
【図1】図1は、車両の全体を示した図である。
【図2】図2は、物体検出システムのブロック図である。
【図3】図3は、レーダ装置とカメラを備えた画像処理装置の物体検出範囲を示した図である。
【図4】図4は、物体の情報を周波数とパワーで表した図である。
【図5】図5は、カメラを備えた画像処理装置による物体検出の画像を示した図である。
【図6】図6は、電子制御装置の処理フローチャートである。
【図7】図7は、ナビゲーション装置と各種センサを備えた物体検出システムのブロック図である。
【図8】図8は、カーブでのレーダ装置とカメラを備えた画像処理装置による物体検出範囲を示した図である。
【図9】図9は、カーブでのカメラを備えた画像処理装置による物体検出の画像を示した図である。
【図10】図10は、走行情報を用いた電子制御装置の処理フローチャートである。
【発明を実施するための形態】
【0023】
以下では、本発明の実施の形態について図面を参照して説明する。
【0024】
[実施の形態1]
<1−1.構成>
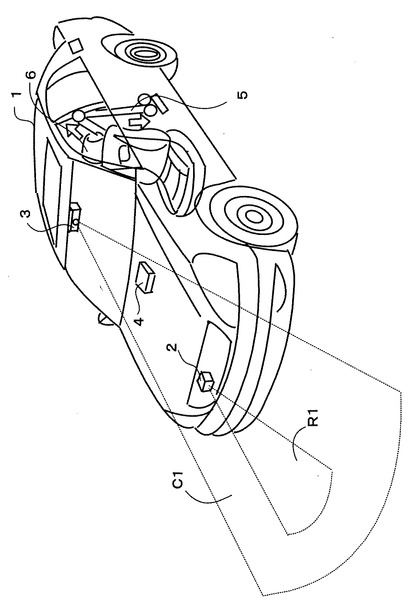
図1は、車両1の全体図である。車両1には、本実施の形態の物体検出システムが備える要素として、レーダ装置2、画像処理装置3及び電子制御装置4が設けられている。レーダ装置2は、車両前方のフロント部分に設けられている。レーダ装置2は、車両1と車外の物体間の距離、および、車両1からみた車外の物体の角度(以下、「物体の位置」という。)、車両1からみた車外の物体の速度である車両1と車外の物体との相対速度、または、車外の物体の絶対速度(以下、「速度情報」という。)を検出する。なお、レーダ装置2の車両1への搭載位置は車両前方のフロント部分に限らず、車両1の後方や側方に設けても良い。
【0025】
レーダ装置2は、アンテナから送信した電波などの信号(以下、「送信波」という。)が車外の物体に当たってはね返り、そのはね返った信号を受信する(以下、「受信波」という。)。この送信波と受信波の時間差とドップラーシフトの情報に基づいて、レーダ装置2は物体の位置、および、速度情報を検出する。レーダ装置2の物体検出範囲はR1の範囲である。
【0026】
画像処理装置3は、車両1のOLE_LINK2フロントガラスの車室内天井付近OLE_LINK2に設けられている。画像処理装置3は、検出範囲C1を撮影して電子的に画像を取得するカメラを備えており、これらの範囲の撮影による得られる画像内の物体の位置や大きさを検出する。カメラを備えた画像処理装置3の車両1への搭載位置はフロントガラスの車室内天井付近限らず、車両の内外で後方や側方に設けても良い。
【0027】
電子制御装置4は、車両1の車両本体内部に設けられている。電子制御装置4はレーダ装置2、および、画像処理装置3から得られた車外の物体の情報(物体の位置、速度情報、角度情報、物体から跳ね返ってレーダ装置2のアンテナが受信した受信波の反射強度、物体の画像上の位置、および、物体の大きさなど)を用いて車外の物体の種類を判定し、車外の物体と車両1との衝突の可能性に応じて車両制御を行う。
【0028】
車両制御は車両1と車外の物体との衝突の危険性を警報によりドライバーなどの乗員に報知したり、衝突前に運転操作に自動的に介入して、ブレーキをかけたり、ステアリングを所定の方向に操作することで、車外の物体との衝突を避ける。また、シートベルト5を矢印方向に自動的に引いて衝突時にドライバーなどの乗員の体を固定したり、衝突時にヘッドレスト6を矢印方向に移動させて衝突の衝撃を緩和し、ドライバーなどの乗員の安全を確保する車両制御もある。
【0029】
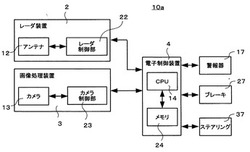
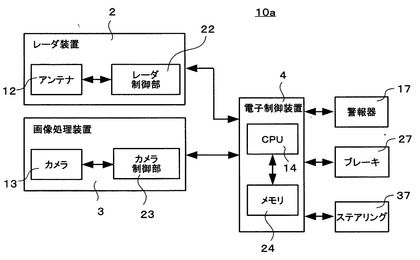
図2は、物体検出システム10のブロック図である。レーダ装置2はアンテナ12から送信波を出力し、車外の物体から跳ね返った受信波を受信する。レーダ制御部22は送信波を生成したり、アンテナ21が受信した受信波と送信波とをミキシングすることにより得られた送信波と受信波との時間差分とドップラーシフト分の情報をビート信号として算出する。レーダ制御部22は算出されたビート信号を高速フーリエ変換して車両1と車外の物体との距離情報と速度情報とを算出する。
【0030】
ここで、レーダ装置2による物体検出の具体的な例として、図3及び図4を用いて説明する。図3はレーダ装置とカメラとを備えた画像処理装置3の物体検出範囲を示した図であり、図4は物体の情報を周波数とパワーで表した図である。
【0031】
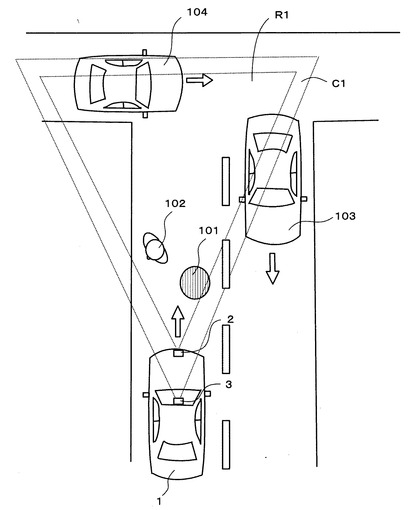
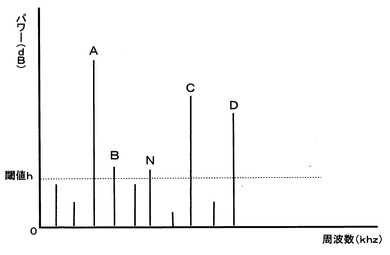
図3に示すようにレーダ装置2の検出範囲R1の中には、マンホール101、人102、対向車両103、および、遠方車両104がある。車両1との距離は近い順番からマンホール101、人102、対向車両103、遠方車両104である。これらの101から104の物体の情報を周波数とパワーで表したものが図4の図となる。図4の物体の情報を周波数とパワーで表した図は、横軸を周波数、縦軸をパワーとする表の中に物体の検出結果が表示されている。横軸の周波数は車両1と物体との距離を示すものであり、周波数が高くなるにつれて車両1と物体との距離は離れていることとなる。
【0032】
また、縦軸のパワーは、物体からの受信波の反射強度を示すものである。したがって、車両など反射する面積が広く電波などの信号が跳ね返りやすい(表面の信号の反射率が高い)場合はパワーは強くなり、車両1からの距離が近いほどパワーは強くなる。また、反射する面積が狭く表面の反射率が低いほどパワーは弱くなり、車両1からの距離が遠いほどパワーは弱くなる。なお、図4の表の中で強弱様々な値を有する信号をピークという。
【0033】
このピークが図3の物体のいずれに対応しているのかをみると、マンホール101の物体の情報は、図4に示す複数のピークの中で所定の閾値hを越えて、かつ、車両1から最も近い距離にあるピークAに該当する。ここで、所定の閾値は検出物体の中で最も反射強度が弱くなる人を検出できる値としたものであり、閾値を超えないピークはノイズとみなして物体としての検出対象とはしない。
【0034】
次にマンホール101の次に車両1から近い距離にある人102の物体情報は、図4のピークBに該当し、対向車両103はピークCに該当し、遠方車両104はピークDに該当する。ここで閾値hを超えて反射強度が人102と同じくらいの強度を有するピークNは図3の中のどの物体にも該当しない。人のように反射強度の弱い物体を検出するためには閾値hをできるだけ下げて、物体を検出するパワーの閾値hを超えるピークを物体の情報として抽出する必要があるが、パワーの閾値hを下げた結果、物体として存在しないものも物体の情報を有するピークとして抽出する可能性がある。このように本来存在しない物体の情報を物体が存在するものとして抽出した場合の処理については、後に述べる電子制御装置4による画像情報の処理により詳細に述べる。
【0035】
また、図4において、対向車両103に対応するピークC、及び、遠方車両104に対応するピークDに関しては、両方のピークともパワーの閾値hを超えており、ピークC、ピークDの順番に車両1からの距離が離れた状態となっている。
【0036】
なお、車両1からみた各物体の角度については、アンテナ12を所定の角度(例えば最大振角30度)に振ってスキャンを行う方式の場合は、アンテナの振角と受信波を対応付けて物体の角度を算出する。アンテナ12を振らずにアンテナを所定の方向に固定したままスキャンを行う場合は、図4の各ピークごとに有している受信波の位相差情報から角度を算出する。
【0037】
次に図2に戻って、画像処理装置3および電子制御装置4の説明を行う。画像処理装置3はレーダ装置2の物体検出範囲R1と重なる範囲であるC1の範囲をカメラ13を用いて撮影する。カメラ13と電気的に接続されているカメラ制御部23は、後述する電子制御装置4の情報に基づいて、撮影した1フレームの画像の中から所定の画像範囲のみに係る画像を電子制御装置4へ送信する。
【0038】
電子制御装置4は、レーダ装置2および画像処理装置3からの情報を受信するCPU14と、このCPU14に電気的に接続されているメモリ24とを備えている。CPU14は、レーダ装置2および画像処理装置3からの物体の位置、速度情報、および、物体の種類などの情報を受けて、後述する警報器17、ブレーキ27、ステアリング37を操作した車両制御を行う。また、メモリ24には物体の種類を判別するための情報が記憶されている。物体の種類を判別する情報の例としては、画像における物体の大きさを判定するための物体各種のテンプレート情報などである。
【0039】
電子制御装置4及び画像処理装置3が処理を行う画像の具体例を図3と図5とを用いて説明する。図5は、カメラを備えた画像処理装置3により取得された画像を示した図である。図3では画像処理装置3の撮影範囲であるC1の範囲内にはマンホール101、人102、対向車両103、および、遠方車両104がある。なお、レーダ装置2により検出され、図4のピークNとして説明したノイズは検出範囲には物体として存在しない。
【0040】
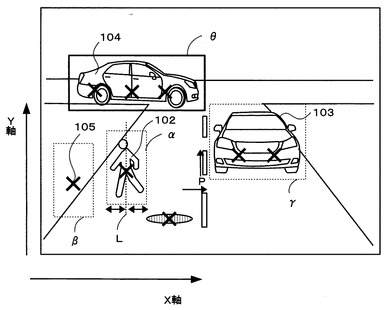
画像処理装置3により撮影した画像には図5に示すように、マンホール101、人102、対向車両103、および、遠方車両104が存在している。そして、それぞれの物体の画像の位置には×印が付されている。これらの×印はレーダ装置2により検出された物体の情報に対応して付されており、個々の×印が車両1との距離情報、速度情報、角度情報、および、反射強度の情報を有しており、電子制御装置4は、これらのレーダ装置2の物体情報の中から、距離と角度情報に基づいてそれぞれの物体が1フレームの画像上のどの位置に対応しているかを判別する。また、電子制御装置4は、速度情報と反射強度の情報から、個々の物体の情報である×印が組み合わされてひとつの物体を構成しているか否かも判定し、組み合わせた範囲の大きさなどの情報から物体の種類を予測している。なお、画像の中では図4に示したノイズのピークNの情報も物体105として画像上に検出されている。
【0041】
物体の種類の予測の具体例としては、例えば、マンホール101の絶対速度がゼロで反射強度が比較的強く、絶対速度がゼロで反射強度が比較的強いという同じ性質を有する反射点が周辺にないことから、複数の反射点を有する物体ではないことが判別できる。電子制御装置4は、電子制御装置4内のメモリ24に予め記憶している物体の種類の判別情報からマンホール101の物体の種類をマンホールと予測する。
【0042】
また、相対速度が比較的小さく反射強度が比較的弱い反射点で、同じ性質を有する反射点が周辺にないことから、電子制御装置4は、メモリ24の情報により人102の物体の種類を人と予測する。相対速度が比較的大きく反射強度が比較的強い反射点があり、かつ、同じ性質を有する反射点が近傍領域に複数あるため、電子制御装置4は、対向車両103の物体の種類を車両と予測する。また、相対速度は一定であるが、反射強度は比較的強く、同じ性質を有する反射点が近傍領域に複数あるため、電子制御装置4は、遠方車両104の物体の種類を車両と予測する。
【0043】
また、相対速度が比較的小さく反射強度が比較的弱い反射点で、同じ性質を有する反射点が周辺にないことから、電子制御装置4は、メモリ24の情報により物体105の物体の種類を人と予測する。
【0044】
このようにして電子制御装置4は、レーダ情報から物体の種類を推定し、その物体の種類に応じて、メモリ24に予め記憶している物体の種類の判別情報に応じたサイズの画像範囲を選択して、その選択した画像範囲の切り取りの指示を画像処理装置3に行う。例えば、推定した物体の種類が歩行者であれば比較的小さな縦長のサイズの領域が選択される。また、推定した物体の種類が車両であれば比較的大きな横長のサイズの領域が選択される。この切り取りの指示に応答して、画像処理装置3は、指定された画像範囲について切り取りを行う。また、物体の種類の判別パターンはこれまで説明した人や車両以外にも二輪車両、電柱、歩道橋、鉄橋など様々な物体の種類に応じた判別パターンをメモリ24に記憶させることができ、これら種類の異なる物体のサイズに応じた領域を選択可能である。
【0045】
切り取られた画像は処理対象領域として画像処理装置3から電子制御装置4へ送信され、この処理対象領域のみを対象にして電子制御装置4により物体の種類判定のための画像認識が行われる。この際、当該処理対象領域を切り取る際に予測された物体の種類に応じた判定手法が用いられる。例えば、予測された物体の種類が人の場合の画像認識手法の例としては、レーダ情報に基づく候補物体の予測から人の大きさの画像範囲αを切り取り、その範囲を走査して画像の輝度の変化を検出する。所定の幅で輝度が変化していれば、その幅の大きさに該当する対象物を人と判別することができる。例えば、図5に示す物体102の場合では、中心軸LからX軸方向の左右対称に所定の幅を有していることから、当該物体の種類を人と判定することができる。一方で、同図に示す物体105の場合は、画像範囲βを切り取った画像を走査しても人の輝度変化にあたる画像の輝度の変化は検出されないことから、この判定結果により該当する物体の種類はなく、ノイズと判定する。
【0046】
また、予測された物体の種類が車両の場合の判定方法としては画像の輝度の変化を検出したエッジの部分から別方向に画像の輝度を検出し、検出した方向の輝度の変化の幅の大きさから対象物を判別する手法がある。例えば、図5では画像範囲γのX軸方向の画像走査により点Pの画像の輝度変化が検出された場合、次に点PからX軸方向ではなくY軸方向に画像の輝度変化を検出することで、対向車両103の物体の種類を車両と判定する。
【0047】
さらに、予測された物体の種類が人及び車両の双方の場合に用いることが可能な手法として、画像を走査して走査した画像の輝度の変化の範囲を検出して、予めメモリ24に記憶している対象物の大きさと形状のテンプレートを当てはめることで、対象物の種類を判別する手法もある。例えば図5では画像範囲θに車両のテンプレートを遠方車両104に当てはめることで、遠方車両104の物体の種類を車両と判定している。
【0048】
<1−2.動作>
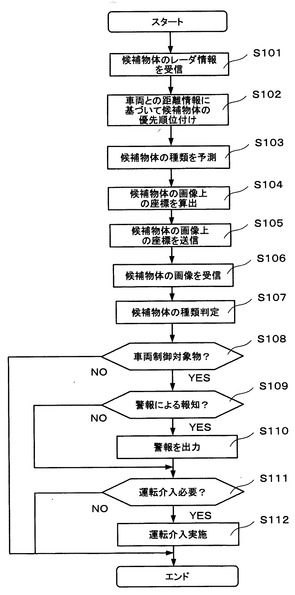
電子制御装置4の処理を図6に示すフローチャートを用いて説明する。電子制御装置4はレーダ装置2からレーダ情報を受信する(ステップS101)。レーダ情報は、検出対象の候補物体(以下、「候補物体」という。)が有する情報であり、車両1と車外の物体との距離情報、速度情報、角度情報、および、反射強度の情報である。
【0049】
電子制御装置4はレーダ情報に含まれる車両と物体との距離情報に基づいて、複数の候補物体に対して車両1との距離が近い順に処理の優先順位付けを行う(ステップS102)。これは車両1との距離が近ければ、車両1との衝突可能性が高いと考えられることから、車両1のドライバーなどの乗員に対して早期の警告を行ったり、車両1の運転に介入するような車両制御を迅速に行う必要性があるためである。なお、本実施形態の優先順位付けは距離が比較的近い物体の優先順位を高く設定することを例としたが、速度情報を優先順位付けの要素として、例えば、相対速度が大きい順番に優先順位付けを行ったり、車両1との距離が比較的近く、かつ、相対速度が大きい候補物体の優先順位を高くするようにしてもよい。
【0050】
次に電子制御装置4は処理の優先順位の高い候補物体からその物体の種類を予測する(ステップS103)。具体的には、候補物体がそれぞれ有しているレーダ情報から物体の種類を予測するもので、例えば距離が比較的近くて、相対速度が比較的大きく、反射強度の比較的強いレーダ情報を有する候補物体は車両と予測する。なお、車両はレーダ装置2の送信波を車体複数の箇所で跳ね返すため、レーダ情報の中でもほぼ同一の距離、相対速度、および、反射強度を有するレーダ情報が近い領域に複数ある場合は、これらのレーダ情報を同一の物体を構成する複数の反射点として扱い、1つの物体を形成する反射点が多いほど大きな物体であるとして物体の種類の予測を行う。
【0051】
距離が近くても相対速度が比較的小さく、反射強度は弱く、反射点の数が少ない場合は人と予測する。また、反射強度が強い場合で、絶対速度がゼロの場合は反射点の数が少ない場合は、道路にある静止物(例えば、マンホールやガードレールなど)と予測する。
【0052】
電子制御装置4は、候補物体のレーダ情報と物体の種類の情報に基づいて、該当する候補物体が画像処理装置3にある1フレームの画像の中のどの座標に該当するかを算出する(ステップS104)。具体的には処理の優先順位の高い候補物体のレーダ情報の距離と角度の情報により、画像処理装置3により撮影された1フレームの画像の中の座標位置と候補物体とを対応させる。また、予測した物体の種類に応じて、その座標位置を基準とした1フレームの画像の中の所定の範囲を算出する。
【0053】
電子制御装置4は予測した物体の種類に応じた画像の座標情報を画像処理装置3に送信する(ステップS105)。画像の範囲の座標情報を受信した画像処理装置3は、カメラ13を用いて撮影した1フレームの物体の種類に応じたサイズの画像範囲を切り出して、電子制御装置4に送信する。例えば、予測した物体の種類が歩行者であれば比較的小さな縦長の領域が切り出される。また、予測した物体の種類が車両であれば比較的大きな横長の領域が切り出される。なお、物体の種類の判別パターンはこれまで説明した人や車両などの物体以外にも二輪車両、電柱、歩道橋、鉄橋など様々な物体の種類に応じた判別パターンをメモリ24に記憶させることができ、これら種類の異なる物体のサイズに応じた領域を選択して切り出すことが可能である。
【0054】
電子制御装置4は画像処理装置3が送信した画像情報を処理対象領域として受信して(ステップS106)、受信した画像情報のみを対象に物体の種類判定を行う(ステップS107)。物体の種類の判定は、画像を走査判定して、対象画像の輝度の変化のある範囲を検出して、物体の種類を判定する。物体の種類の判定手法としては、処理対象領域に対応する物体の予測された種類に応じた判定手法を用いる。例えば、変化のある範囲の中心をとり、変化の範囲が対称性をみて物体の種類を判定する手法がある。また、所定の方向に走査して、変化がある点から交差する方向に走査方向を変更して、輝度の変化範囲に基づいて物体の種類を判定する手法がある。さらに、予めメモリ24に保存しているテンプレートを輝度が変化している画像の範囲に当てはめて、物体の種類を判定する手法がある。
【0055】
また、気温・湿度の変化により画像センサが検出する信号のS/N比が悪化し、弱い光の輝度の検出が困難となる場合がある。そのため、気温や湿度の変化により画像の輝度を検出する閾値を所定の値に設定することもできる。
【0056】
物体の種類判定の結果、その物体が車両制御の対象物である場合(ステップS108がYes)は、警報器17からの警報による報知を行うか否かを判断する(ステップS109)。物体が車両制御の対象でない場合は、処理を終了する(ステップS108がNo)。
【0057】
警報による報知が必要な場合(ステップS109がYes)は、警報器17から警報を出力する(ステップS110)。警報は車室内に備えているナビゲーション装置から音声による警告を行ったり、映像による警告を行う。
【0058】
警報を出力した後、または、警報による報知が必要ない場合(ステップS109がNo)は、運転介入が必要であるか否かを判断する(ステップS111)。運転介入が必要な場合(ステップS111がYes)は、ブレーキ27やステアリング37を自動的に操作して運転介入を行う(ステップS112)。運転介入の例としては、車外の物体に車両1が衝突する可能性が有る場合に、自動的にブレーキ27を操作して車両を停止させたり、物体が存在しない方向にステアリング37を自動的に操作するものがある。また、衝突前にシートベルト5を固定したり、ヘッドレスト6を固定したりすることで、衝突に備えて車両1のドライバーなどの乗員の安全を確保できる。
【0059】
運転介入が必要でない場合(ステップS111がNo)は、処理を終了する。例えばドライバーの操作により車外の物体との衝突が避けられる場合である。
【0060】
以上のように本実施の形態の物体検出システム10においては、電子制御装置4が、レーダ情報に基づく検出対象の候補物体の画像中の座標を導出するとともに、レーダ情報に基づいて候補物体の種類が予測する。そして、電子制御装置4は、画像中における候補物体の導出された座標の周辺における候補物体の予測された種類に応じたサイズの領域を処理対象領域として指定し、その画像領域について画像処理装置3に切り出しを行わせる。この切り出された画像領域のみを対象に物体の検出処理がなされる。これにより、電子制御装置4のCPU14が行う画像処理は検出対象とする物体が存在する画像領域に限定され、物体の種類を判定する画像処理負荷を軽減する。また、レーダ装置を採用したことにより、それ自体に負荷がかかるが、画像処理領域を限定することによる画像処理負荷が大幅に減少することから、物体検出システム全体の処理負荷の軽減が可能となる。さらに、電子制御装置4のCPU14の処理負荷軽減により、車外の物体に対する車両制御を迅速に行うことができる。
【0061】
また、レーダ装置2からの情報により予め物体の種類を予測して、電子制御装置4のCPU14による物体の種類判定において予測された種類に応じた判定手法を用いる。このため、物体の種類判定を何度もやり直す必要はなく物体の種類判定が迅速に行える。さらに、電子制御装置4のCPU14の処理負荷軽減により、物体に対する車両制御を迅速に行うことができる。
【0062】
また、候補物体が複数あるときには、複数の候補物体のうち車両との距離の近い順から処理対象とするため、車両制御の対象となる可能性の高い物体から順に検出することができ、ドライバーなど乗員の安全確保を迅速に行うことが可能となる。
【0063】
[実施の形態2]
<2−1.構成>
図7はナビゲーション装置と各種センサを備えた物体検出システムのブロック図であり、実施の形態1の図2に示したブロック図と主に異なる点は、ナビゲーション装置8と車速センサ19、ステアリングセンサ20、ヨーレートセンサ21の各種センサを新たに備えた点である。以下、実施の形態1に記載した動作内容は省略し、異なる動作内容について述べる。
【0064】
ナビゲーション装置8は、表示部18とナビゲーション制御部28を備えており、表示部18はドライバーなどの乗員に対して映像や音声で地図などのナビゲーション情報を通知したり、音楽やデジタルTVなどのオーディオコンテンツ情報を提供する。ナビゲーション制御部はこれらの情報をドライバーなどの乗員に提供するための制御を行う。
【0065】
車速センサ19は車両の速度情報を電子制御装置4に送信する。ステアリングセンサ29は車両のステアリングの舵角を検出して電子制御装置4に送信する。ヨーレートセンサ39は車両1の車体の向きの変化を角速度で検出して電子制御装置4に送信する。電子制御装置4はこれらの車両の走行状態に応じて、車両制御の対象とする候補物体の検出を行う。
【0066】
次にナビゲーション装置8および各種センサを用いて行う候補物体検出の具体例について、図8のカーブでのレーダ装置とカメラを備えた画像処理装置による物体検出範囲を示した図、および、図9のカーブでのカメラを備えた画像処理装置による物体検出の画像を示した図を用いて説明する。
【0067】
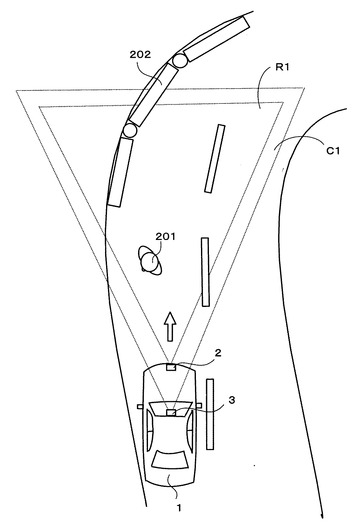
図8では車両1に備えられたレーダ装置2の物体検出範囲R1とカメラを備えた画像処理装置3のC1、C2の物体検出範囲が重なっている。レーダ装置2および画像処理装置3の物体検出範囲には人201とガードレール202が候補物体として入っている。ここで、車両1に備えられたナビゲーション装置4は車両1の進行方向の道路が車両1の現在の位置から所定の距離進むとカーブしていることを検出している。ここで本実施形態のカーブ半径は130m以下の場合をカーブとするが、これに限らず、本実施形態に述べる効果を有する場合は本実施形態のカーブ半径の値以下のカーブであってもよい。
【0068】
レーダ装置2のレーダ情報として、車両1との距離が例えば20m以上離れているような所定の距離を有し、絶対速度がゼロであり、角度は略進行方向正面であり、反射強度が強いピーク(ピークを検出する閾値を超えるパワーを有するピーク)が存在していれば、電子制御装置4から画像処理装置3への所定範囲を切り出す候補物体の対象としてこのレーダ情報を選択しない、または、候補物体として処理の優先順位付けを行わない。
【0069】
自車線内のカーブの入り口手前でカードレール202のような静止物は車両1の制御対象としなくとも、ドライバーのステアリング操作で回避できる。自動的な運転介入を行うことにより、カーブの角度に沿ったステアリングの操作よりも余計にステアリングを操作するような誤った車両制御を行う危険性がある。したがって、車両1がカーブに差し掛かる前に検出した自車線内のガードレールのような静止物は、車両制御の対象とはしない。
【0070】
なお、ガードレール202のような絶対速度がゼロの静止物体のレーダ情報を車両制御の候補物体として選択しない条件としては、ナビゲーション装置4の情報により、その物体が自車線上にあり、かつ、車両1に備えられたステアリングセンサ29、または、ヨーレートセンサ39によって車両1がカーブに沿って走行していないことを示していることも含まれる。ここで、自車線上とは本実施例では一例として車両が所定の車線を走行している場合に、その走行方向の両端にある白線から白線の距離約2.5mの間に車両1が存在する状態をいうが、これに限られず本実施形態の効果を有する範囲が含まれる。
【0071】
さらに、車両1がカーブの入り口に差し掛かり、ドライバーがステアリングをカーブの角度に沿って操作した場合は、その車の旋回の度合いに応じて、ステアリングセンサ29、ヨーレートセンサ39が車両1のカーブ走行状態を示す。車両1がカーブに沿って走行すると、レーダ装置2の検出範囲R2、および画像処理装置の検出範囲C1もカーブの角度に沿って移動する。その結果、レーダ情報により候補物体を検出していれば、車両1との距離や相対速度の情報に応じて優先順位付け行い、候補物体とし画像処理装置3が対象の範囲画像を切り取って、電子制御装置4で物体の種類判定を行い、車両制御の対象物であれば、その物体の状況に応じた車両制御を行うことが可能である。
【0072】
また、本実施形態の変形例としては、車両1が自車線上を走行中に車速センサ19からの車両1の速度情報を取得すると、速度と制動距離の関係から車両1の進行方向における対象物との衝突の可能性がある場合は、その物体を候補物体の処理の優先順位を高くして物体の種類判定を行い、迅速な車両制御を行うことができる。
【0073】
具体的には、ナビゲーション装置4の情報から路面が凍結しているような場合は、車速センサ19による車両1の速度情報と制動距離の関係を算出する。特に凍結路面では乾燥路面よりも制動距離が2倍から3倍以上伸びることを含めて、乾燥路面では優先順位を低くしているような、車両1との距離が他の候補物体よりも離れているレーダ情報の候補物体の処理の優先順位を高くする。
<2−2.動作>
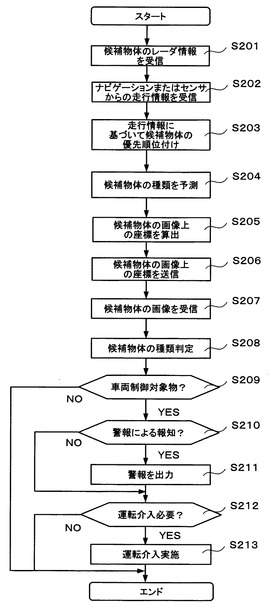
図10は走行情報を用いた電子制御装置の処理フローチャートである。電子制御装置4はレーダ装置2からレーダ情報を受信する(ステップS201)。
【0074】
次に、ナビゲーション装置4、車速センサ19、ステアリングセンサ29、または、ヨーレートセンサ39などの各種センサから車両1の走行情報を受信する(ステップS202)。ここで、走行情報とは上述のようにナビゲーション装置4から得られる道路のカーブや凍結の状態のほか道路の車線数、道路勾配、路面温度、気温、湿度などが含まれる。さらに、車両1の走行状態とは車両の速度や舵角が情報などである。
【0075】
電子制御装置4は、ナビゲーション装置4、および、各種センサからの走行情報を候補物体の優先順位付けの情報とともに、レーダ情報に含まれる距離の情報に基づいて、複数の候補物体に対して優先順位付けを行う(ステップS203)。
【0076】
具体的には、上述のように自車線上の進行路の所定の距離にカーブが存在する場合は、自車線上のガードレールなどのレーダ情報は電子制御装置4の物体の種類判定の対象としないように、候補物体として選択しない。または、候補物体としての処理の優先順位を他の候補物体よりも下げる。
【0077】
また、自車線上の道路が凍結している場合は、車両の速度と制動距離を考慮して、他の候補物体と比較して車両との距離が所定距離以上離れているレーダ情報も候補物体として、処理の優先順位を他の候補物体よりも上げる。
【0078】
次に電子制御装置4は処理の優先順位の高い候補物体からその物体の種類を予測し(ステップS204)、候補物体のレーダ情報と物体の種類の情報とに基づいて、該当する候補物体が画像処理装置3にある1フレームの画像の中のどの座標に該当するかを算出する(ステップS205)。
【0079】
電子制御装置4は予測した物体の種類に応じた画像範囲の座標情報を画像処理装置3に送信する(ステップS206)。画像の範囲の座標の情報を受信した画像処理装置3は、カメラ13を用いて撮影した1フレームの物体の種類に応じた画像範囲を切り出して、電子制御装置4に送信する。
【0080】
電子制御装置4は画像処理装置3が送信した画像情報を受信して(ステップS207)、物体の種類判定を行う(ステップS208)。
【0081】
物体の種類判定の結果、その物体が車両制御の対象物である場合(ステップS209がYes)は、警報器17からの警報による報知を行うか否かを判断する(ステップS210)。物体が車両制御の対象でない場合は(ステップS209がNo)、処理を終了する。
【0082】
警報による報知が必要な場合(ステップS210がYes)は、警報器17から警報を出力する(ステップS211)。警報は図示しない車室内ナビゲーション装置から音声による警告を出力したり、映像による警告を行う。
【0083】
警報を出力した後、または、警報による報知が必要ない場合(ステップS210がNo)は、運転介入が必要であるか否かを判断する(ステップS212)。運転介入が必要な場合(ステップS212がYes)は、ブレーキ27やステアリング37を自動的に操作して運転介入を行う(ステップS213)。
【0084】
運転介入が必要でない場合(ステップS212がNo)は、処理を終了する。例えばドライバーの操作により車外の物体との衝突が避けられる場合である。
【0085】
以上のように、本実施形態では、ナビゲーション装置8、または、各種センサから得られる車両の走行状況を示す走行情報をレーダ装置の情報とあわせて用いることで、車両1が走行する状況に応じて、検出対象とする物体の存在する処理対象領域を選択できる。これにより、電子制御装置4のCPU14の処理負荷が軽減されるとともに、車両1の走行状態に応じた車両制御を迅速に行うことができる。
【0086】
また、車両制御の対象となる可能性の高い物体から順に検出することができ、ドライバーなど車両の乗員の安全確保を迅速に行うことができる。
【符号の説明】
【0087】
1・・・・・ 車両
2・・・・・ レーダ装置
3・・・・・ 画像処理装置
5・・・・・ シートベルト
6・・・・・ ヘッドレスト
12・・・・ アンテナ
13・・・・ カメラ
14・・・・ CPU
17・・・・ 警報器
22・・・・ レーダ制御部
23・・・・ カメラ制御部
27・・・・ ブレーキ
37・・・・ ステアリング
【技術分野】
【0001】
本発明は、レーダ装置により検出した物体情報と画像情報を用いて車両制御を行う技術に関する。
【背景技術】
【0002】
一般に、レーダ装置はアンテナから送信した電波などの信号が車外の物体からはね返り、そのはね返った信号をアンテナが受信する。アンテナから送信した信号とアンテナで受信した信号との時間差とドップラーシフトの情報に基づいて、車両と車外の物体間の距離と、車両からみた物体の速度と、車両からみた車外の物体の角度と、車外の物体から受信した受信波の反射強度とを検出できる。
【0003】
しかし、レーダ装置のみを用いて物体を検出する場合、物体から跳ね返った受信波の情報とノイズの情報とを区別するために所定の閾値を設定し、閾値を超える反射強度を有する信号を物体として検出する。その結果、反射強度が強い車両やガードレールなどの物体の検出は可能であるが、反射強度が弱い人を検出することは難しいという問題がある。そのため、反射強度が弱い人を検出するためには、物体を検出するための閾値を下げる必要があるが、閾値を下げた場合、ノイズの情報も物体として検出してしまい、誤った車両制御を行うという問題があった。
【0004】
また、車両にカメラを備えた画像処理装置を搭載して、カメラで撮影した1フレームごとの画像情報を走査して画像中の物体の種類を判別する技術がある。
【0005】
カメラを備えた画像処理装置のみにより物体を検出する場合、物体の種類の判別は可能であっても、相対速度の検出はできないことから、車両と物体とが衝突するまでの時間を検出することができず、衝突を回避する車両制御を行うことが困難であった。また、1フレームごとに画像の全領域について車両制御の対象となる物体を検出するための走査処理を行う必要があることから、車両に搭載されて画像の物体の種類判定を行う電子制御装置のCPUの処理負荷が大きくなり、迅速な車両制御ができないという問題があった。
【0006】
このようなレーダ装置のみを用いた場合、または、カメラのみを用いた場合の問題を解決するために、レーダ装置とカメラを備えた画像処理装置とを組み合わせて、車外の物体の距離、角度、相対速度、および、物体の種類を判別して、車両と物体との衝突を回避する車両制御を行う技術がある。
【0007】
また、レーダ装置と画像処理装置との情報を組み合わせて画像処理を行う場合、レーダ装置で検出した対象物の距離情報を用いて、カメラで撮影した画像処理範囲を限定する技術が開示されている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平9−264954号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、レーダ装置とカメラを用いた画像処理装置とを組み合わせて物体を検出する場合でも、1フレームごとに画像の全領域について車両制御の対象となる物体を検出するための走査処理を行う必要があることから、電子制御装置のCPUの処理負荷が大きくなり、迅速な車両制御ができないという問題があった。
【0010】
また、特許文献1記載の技術では、白線と車両を対象物とした場合に、1フレーム内の対象物の画像を含む所定範囲を画像処理の対象とすることで、画像処理負荷を軽減することについては記載されているものの、対象物の種類ごとにその対象物の大きさに応じて異なる範囲を画像処理することについては考慮されておらず、画像処理負荷が大きくなっていた。
【0011】
本発明は、上記課題に鑑みてなされたものであり、OLE_LINK1電子制御装置の画像処理負荷を軽減して車両制御を迅速に行う技術OLE_LINK1を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記課題を解決するため、請求項1の発明は、車両に設けられ前記車両外の物体の位置と速度を検出するレーダ装置からのレーダ情報と、前記車両に設けられ前記レーダ装置の検出範囲と重なる領域を撮像するカメラで得られた画像とに基づいて、前記車両外の検出対象を検出する物体検出装置であって、前記レーダ情報に基づいて、前記候補物体の種類を予測する予測手段と、前記レーダ情報に基づく前記検出対象の候補物体の前記画像中の座標を導出する導出手段と、前記画像中における前記候補物体の導出された座標の周辺の、当該候補物体の予測された種類に応じたサイズの領域を処理対象領域に設定する設定手段と、前記画像中の前記処理対象領域のみを対象に前記検出対象を検出する検出手段と、を有することを特徴とする物体検出装置。
【0013】
また、請求項2の発明は、請求項1記載の物体検出装置において、前記検出手段は、前記処理対象領域から前記検出対象を検出するときに、当該処理対象領域に対応する前記候補物体の予測された種類に応じた判定手法を用いることを特徴とする物体検出装置。
【0014】
また、請求項3の発明は、請求項1または2記載の物体検出装置において、前記車両の走行状況を示す走行情報を取得する取得手段と、前記走行情報に基づいて、前記レーダ情報に基づく前記候補物体の一部を処理対象として選択する手段、をさらに備えることを特徴とする物体検出装置。
【0015】
また、請求項4の発明は、請求項1乃至3のいずれか記載の物体検出装置において、前記導出手段、前記予測手段、前記設定手段、および、前記検出手段のうち少なくとも1の手段は、前記レーダ情報に基づく前記候補物体が複数あるとき、複数の前記候補物体のうちの前記車両との距離の近い順から処理対象とすることを特徴とする物体検出装置。
【0016】
また、請求項5の発明は、車両に設けられた前記車両外の物体の位置と相対速度を検出するレーダ装置からのレーダ情報と、前記車両に設けられ前記レーダ装置の検出範囲と重なる領域を撮像するカメラで得られた画像とに基づいて、前記車両外の検出対象を検出する物体検出方法であって、前記レーダ情報に基づいて、前記候補物体の種類を予測する工程と、前記レーダ情報に基づく前記検出対象との候補物体の前記画像中の座標を導出する工程と、前記画像中における前記候補物体の導出された座標の周辺の、当該候補物体の予測された種類に応じたサイズの領域を処理対象領域に設定する工程と、前記画像中の前記処理対象領域のみを対象に前記検出対象を検出する工程と、を有することを特徴とする物体検出方法。
【0017】
また、請求項6の発明は、物体検出システムであって、車両に設けられ前記車両外の物体の位置と速度を検出するレーダ装置と、前記車両に設けられ前記レーダ装置の検出範囲と重なる領域を撮像するカメラと、レーダ装置からのレーダ情報と、カメラで得られた画像とに基づいて、前記車両外の検出対象を検出する請求項1ないし4のいずれかに記載の物体検出装置と、を備えることを特徴とする物体検出システム。
【発明の効果】
【0018】
請求項1ないし6の発明によれば、電子制御装置が行う画像処理は検出対象とする物体が存在する画像領域に限定され、物体を検出する画像処理負荷を軽減するとともに、レーダ装置の処理を含めた物体検出システム全体の処理負荷の軽減が可能となる。また、電子制御装置の処理負荷軽減により、物体に対する車両制御を迅速に行うことができる。
【0019】
また、特に請求項2の発明によれば、レーダ装置からの情報により予め物体の種類を予測することで、電子制御装置による物体の種類判定を何度もやり直す必要はなく物体の種類判定が迅速に行える。さらに、電子制御装置の処理負荷軽減により、物体に対する車両制御を迅速に行うことができる。
【0020】
また、特に請求項3の発明によれば、車両の走行状況を示す走行情報をレーダ装置の情報とあわせて用いることで、車両が走行する状況に応じて、処理対象とする候補物体を選択できる。これにより、電子制御装置の処理負荷が軽減されるとともに、車両の走行状態に応じた車両制御を迅速に行うことができる。
【0021】
また、特に請求項4の発明によれば、車両制御の対象となる可能性の高い物体から順に検出することができ、ドライバーなど車両の乗員の安全確保を迅速に行うことが可能となる。
【図面の簡単な説明】
【0022】
【図1】図1は、車両の全体を示した図である。
【図2】図2は、物体検出システムのブロック図である。
【図3】図3は、レーダ装置とカメラを備えた画像処理装置の物体検出範囲を示した図である。
【図4】図4は、物体の情報を周波数とパワーで表した図である。
【図5】図5は、カメラを備えた画像処理装置による物体検出の画像を示した図である。
【図6】図6は、電子制御装置の処理フローチャートである。
【図7】図7は、ナビゲーション装置と各種センサを備えた物体検出システムのブロック図である。
【図8】図8は、カーブでのレーダ装置とカメラを備えた画像処理装置による物体検出範囲を示した図である。
【図9】図9は、カーブでのカメラを備えた画像処理装置による物体検出の画像を示した図である。
【図10】図10は、走行情報を用いた電子制御装置の処理フローチャートである。
【発明を実施するための形態】
【0023】
以下では、本発明の実施の形態について図面を参照して説明する。
【0024】
[実施の形態1]
<1−1.構成>
図1は、車両1の全体図である。車両1には、本実施の形態の物体検出システムが備える要素として、レーダ装置2、画像処理装置3及び電子制御装置4が設けられている。レーダ装置2は、車両前方のフロント部分に設けられている。レーダ装置2は、車両1と車外の物体間の距離、および、車両1からみた車外の物体の角度(以下、「物体の位置」という。)、車両1からみた車外の物体の速度である車両1と車外の物体との相対速度、または、車外の物体の絶対速度(以下、「速度情報」という。)を検出する。なお、レーダ装置2の車両1への搭載位置は車両前方のフロント部分に限らず、車両1の後方や側方に設けても良い。
【0025】
レーダ装置2は、アンテナから送信した電波などの信号(以下、「送信波」という。)が車外の物体に当たってはね返り、そのはね返った信号を受信する(以下、「受信波」という。)。この送信波と受信波の時間差とドップラーシフトの情報に基づいて、レーダ装置2は物体の位置、および、速度情報を検出する。レーダ装置2の物体検出範囲はR1の範囲である。
【0026】
画像処理装置3は、車両1のOLE_LINK2フロントガラスの車室内天井付近OLE_LINK2に設けられている。画像処理装置3は、検出範囲C1を撮影して電子的に画像を取得するカメラを備えており、これらの範囲の撮影による得られる画像内の物体の位置や大きさを検出する。カメラを備えた画像処理装置3の車両1への搭載位置はフロントガラスの車室内天井付近限らず、車両の内外で後方や側方に設けても良い。
【0027】
電子制御装置4は、車両1の車両本体内部に設けられている。電子制御装置4はレーダ装置2、および、画像処理装置3から得られた車外の物体の情報(物体の位置、速度情報、角度情報、物体から跳ね返ってレーダ装置2のアンテナが受信した受信波の反射強度、物体の画像上の位置、および、物体の大きさなど)を用いて車外の物体の種類を判定し、車外の物体と車両1との衝突の可能性に応じて車両制御を行う。
【0028】
車両制御は車両1と車外の物体との衝突の危険性を警報によりドライバーなどの乗員に報知したり、衝突前に運転操作に自動的に介入して、ブレーキをかけたり、ステアリングを所定の方向に操作することで、車外の物体との衝突を避ける。また、シートベルト5を矢印方向に自動的に引いて衝突時にドライバーなどの乗員の体を固定したり、衝突時にヘッドレスト6を矢印方向に移動させて衝突の衝撃を緩和し、ドライバーなどの乗員の安全を確保する車両制御もある。
【0029】
図2は、物体検出システム10のブロック図である。レーダ装置2はアンテナ12から送信波を出力し、車外の物体から跳ね返った受信波を受信する。レーダ制御部22は送信波を生成したり、アンテナ21が受信した受信波と送信波とをミキシングすることにより得られた送信波と受信波との時間差分とドップラーシフト分の情報をビート信号として算出する。レーダ制御部22は算出されたビート信号を高速フーリエ変換して車両1と車外の物体との距離情報と速度情報とを算出する。
【0030】
ここで、レーダ装置2による物体検出の具体的な例として、図3及び図4を用いて説明する。図3はレーダ装置とカメラとを備えた画像処理装置3の物体検出範囲を示した図であり、図4は物体の情報を周波数とパワーで表した図である。
【0031】
図3に示すようにレーダ装置2の検出範囲R1の中には、マンホール101、人102、対向車両103、および、遠方車両104がある。車両1との距離は近い順番からマンホール101、人102、対向車両103、遠方車両104である。これらの101から104の物体の情報を周波数とパワーで表したものが図4の図となる。図4の物体の情報を周波数とパワーで表した図は、横軸を周波数、縦軸をパワーとする表の中に物体の検出結果が表示されている。横軸の周波数は車両1と物体との距離を示すものであり、周波数が高くなるにつれて車両1と物体との距離は離れていることとなる。
【0032】
また、縦軸のパワーは、物体からの受信波の反射強度を示すものである。したがって、車両など反射する面積が広く電波などの信号が跳ね返りやすい(表面の信号の反射率が高い)場合はパワーは強くなり、車両1からの距離が近いほどパワーは強くなる。また、反射する面積が狭く表面の反射率が低いほどパワーは弱くなり、車両1からの距離が遠いほどパワーは弱くなる。なお、図4の表の中で強弱様々な値を有する信号をピークという。
【0033】
このピークが図3の物体のいずれに対応しているのかをみると、マンホール101の物体の情報は、図4に示す複数のピークの中で所定の閾値hを越えて、かつ、車両1から最も近い距離にあるピークAに該当する。ここで、所定の閾値は検出物体の中で最も反射強度が弱くなる人を検出できる値としたものであり、閾値を超えないピークはノイズとみなして物体としての検出対象とはしない。
【0034】
次にマンホール101の次に車両1から近い距離にある人102の物体情報は、図4のピークBに該当し、対向車両103はピークCに該当し、遠方車両104はピークDに該当する。ここで閾値hを超えて反射強度が人102と同じくらいの強度を有するピークNは図3の中のどの物体にも該当しない。人のように反射強度の弱い物体を検出するためには閾値hをできるだけ下げて、物体を検出するパワーの閾値hを超えるピークを物体の情報として抽出する必要があるが、パワーの閾値hを下げた結果、物体として存在しないものも物体の情報を有するピークとして抽出する可能性がある。このように本来存在しない物体の情報を物体が存在するものとして抽出した場合の処理については、後に述べる電子制御装置4による画像情報の処理により詳細に述べる。
【0035】
また、図4において、対向車両103に対応するピークC、及び、遠方車両104に対応するピークDに関しては、両方のピークともパワーの閾値hを超えており、ピークC、ピークDの順番に車両1からの距離が離れた状態となっている。
【0036】
なお、車両1からみた各物体の角度については、アンテナ12を所定の角度(例えば最大振角30度)に振ってスキャンを行う方式の場合は、アンテナの振角と受信波を対応付けて物体の角度を算出する。アンテナ12を振らずにアンテナを所定の方向に固定したままスキャンを行う場合は、図4の各ピークごとに有している受信波の位相差情報から角度を算出する。
【0037】
次に図2に戻って、画像処理装置3および電子制御装置4の説明を行う。画像処理装置3はレーダ装置2の物体検出範囲R1と重なる範囲であるC1の範囲をカメラ13を用いて撮影する。カメラ13と電気的に接続されているカメラ制御部23は、後述する電子制御装置4の情報に基づいて、撮影した1フレームの画像の中から所定の画像範囲のみに係る画像を電子制御装置4へ送信する。
【0038】
電子制御装置4は、レーダ装置2および画像処理装置3からの情報を受信するCPU14と、このCPU14に電気的に接続されているメモリ24とを備えている。CPU14は、レーダ装置2および画像処理装置3からの物体の位置、速度情報、および、物体の種類などの情報を受けて、後述する警報器17、ブレーキ27、ステアリング37を操作した車両制御を行う。また、メモリ24には物体の種類を判別するための情報が記憶されている。物体の種類を判別する情報の例としては、画像における物体の大きさを判定するための物体各種のテンプレート情報などである。
【0039】
電子制御装置4及び画像処理装置3が処理を行う画像の具体例を図3と図5とを用いて説明する。図5は、カメラを備えた画像処理装置3により取得された画像を示した図である。図3では画像処理装置3の撮影範囲であるC1の範囲内にはマンホール101、人102、対向車両103、および、遠方車両104がある。なお、レーダ装置2により検出され、図4のピークNとして説明したノイズは検出範囲には物体として存在しない。
【0040】
画像処理装置3により撮影した画像には図5に示すように、マンホール101、人102、対向車両103、および、遠方車両104が存在している。そして、それぞれの物体の画像の位置には×印が付されている。これらの×印はレーダ装置2により検出された物体の情報に対応して付されており、個々の×印が車両1との距離情報、速度情報、角度情報、および、反射強度の情報を有しており、電子制御装置4は、これらのレーダ装置2の物体情報の中から、距離と角度情報に基づいてそれぞれの物体が1フレームの画像上のどの位置に対応しているかを判別する。また、電子制御装置4は、速度情報と反射強度の情報から、個々の物体の情報である×印が組み合わされてひとつの物体を構成しているか否かも判定し、組み合わせた範囲の大きさなどの情報から物体の種類を予測している。なお、画像の中では図4に示したノイズのピークNの情報も物体105として画像上に検出されている。
【0041】
物体の種類の予測の具体例としては、例えば、マンホール101の絶対速度がゼロで反射強度が比較的強く、絶対速度がゼロで反射強度が比較的強いという同じ性質を有する反射点が周辺にないことから、複数の反射点を有する物体ではないことが判別できる。電子制御装置4は、電子制御装置4内のメモリ24に予め記憶している物体の種類の判別情報からマンホール101の物体の種類をマンホールと予測する。
【0042】
また、相対速度が比較的小さく反射強度が比較的弱い反射点で、同じ性質を有する反射点が周辺にないことから、電子制御装置4は、メモリ24の情報により人102の物体の種類を人と予測する。相対速度が比較的大きく反射強度が比較的強い反射点があり、かつ、同じ性質を有する反射点が近傍領域に複数あるため、電子制御装置4は、対向車両103の物体の種類を車両と予測する。また、相対速度は一定であるが、反射強度は比較的強く、同じ性質を有する反射点が近傍領域に複数あるため、電子制御装置4は、遠方車両104の物体の種類を車両と予測する。
【0043】
また、相対速度が比較的小さく反射強度が比較的弱い反射点で、同じ性質を有する反射点が周辺にないことから、電子制御装置4は、メモリ24の情報により物体105の物体の種類を人と予測する。
【0044】
このようにして電子制御装置4は、レーダ情報から物体の種類を推定し、その物体の種類に応じて、メモリ24に予め記憶している物体の種類の判別情報に応じたサイズの画像範囲を選択して、その選択した画像範囲の切り取りの指示を画像処理装置3に行う。例えば、推定した物体の種類が歩行者であれば比較的小さな縦長のサイズの領域が選択される。また、推定した物体の種類が車両であれば比較的大きな横長のサイズの領域が選択される。この切り取りの指示に応答して、画像処理装置3は、指定された画像範囲について切り取りを行う。また、物体の種類の判別パターンはこれまで説明した人や車両以外にも二輪車両、電柱、歩道橋、鉄橋など様々な物体の種類に応じた判別パターンをメモリ24に記憶させることができ、これら種類の異なる物体のサイズに応じた領域を選択可能である。
【0045】
切り取られた画像は処理対象領域として画像処理装置3から電子制御装置4へ送信され、この処理対象領域のみを対象にして電子制御装置4により物体の種類判定のための画像認識が行われる。この際、当該処理対象領域を切り取る際に予測された物体の種類に応じた判定手法が用いられる。例えば、予測された物体の種類が人の場合の画像認識手法の例としては、レーダ情報に基づく候補物体の予測から人の大きさの画像範囲αを切り取り、その範囲を走査して画像の輝度の変化を検出する。所定の幅で輝度が変化していれば、その幅の大きさに該当する対象物を人と判別することができる。例えば、図5に示す物体102の場合では、中心軸LからX軸方向の左右対称に所定の幅を有していることから、当該物体の種類を人と判定することができる。一方で、同図に示す物体105の場合は、画像範囲βを切り取った画像を走査しても人の輝度変化にあたる画像の輝度の変化は検出されないことから、この判定結果により該当する物体の種類はなく、ノイズと判定する。
【0046】
また、予測された物体の種類が車両の場合の判定方法としては画像の輝度の変化を検出したエッジの部分から別方向に画像の輝度を検出し、検出した方向の輝度の変化の幅の大きさから対象物を判別する手法がある。例えば、図5では画像範囲γのX軸方向の画像走査により点Pの画像の輝度変化が検出された場合、次に点PからX軸方向ではなくY軸方向に画像の輝度変化を検出することで、対向車両103の物体の種類を車両と判定する。
【0047】
さらに、予測された物体の種類が人及び車両の双方の場合に用いることが可能な手法として、画像を走査して走査した画像の輝度の変化の範囲を検出して、予めメモリ24に記憶している対象物の大きさと形状のテンプレートを当てはめることで、対象物の種類を判別する手法もある。例えば図5では画像範囲θに車両のテンプレートを遠方車両104に当てはめることで、遠方車両104の物体の種類を車両と判定している。
【0048】
<1−2.動作>
電子制御装置4の処理を図6に示すフローチャートを用いて説明する。電子制御装置4はレーダ装置2からレーダ情報を受信する(ステップS101)。レーダ情報は、検出対象の候補物体(以下、「候補物体」という。)が有する情報であり、車両1と車外の物体との距離情報、速度情報、角度情報、および、反射強度の情報である。
【0049】
電子制御装置4はレーダ情報に含まれる車両と物体との距離情報に基づいて、複数の候補物体に対して車両1との距離が近い順に処理の優先順位付けを行う(ステップS102)。これは車両1との距離が近ければ、車両1との衝突可能性が高いと考えられることから、車両1のドライバーなどの乗員に対して早期の警告を行ったり、車両1の運転に介入するような車両制御を迅速に行う必要性があるためである。なお、本実施形態の優先順位付けは距離が比較的近い物体の優先順位を高く設定することを例としたが、速度情報を優先順位付けの要素として、例えば、相対速度が大きい順番に優先順位付けを行ったり、車両1との距離が比較的近く、かつ、相対速度が大きい候補物体の優先順位を高くするようにしてもよい。
【0050】
次に電子制御装置4は処理の優先順位の高い候補物体からその物体の種類を予測する(ステップS103)。具体的には、候補物体がそれぞれ有しているレーダ情報から物体の種類を予測するもので、例えば距離が比較的近くて、相対速度が比較的大きく、反射強度の比較的強いレーダ情報を有する候補物体は車両と予測する。なお、車両はレーダ装置2の送信波を車体複数の箇所で跳ね返すため、レーダ情報の中でもほぼ同一の距離、相対速度、および、反射強度を有するレーダ情報が近い領域に複数ある場合は、これらのレーダ情報を同一の物体を構成する複数の反射点として扱い、1つの物体を形成する反射点が多いほど大きな物体であるとして物体の種類の予測を行う。
【0051】
距離が近くても相対速度が比較的小さく、反射強度は弱く、反射点の数が少ない場合は人と予測する。また、反射強度が強い場合で、絶対速度がゼロの場合は反射点の数が少ない場合は、道路にある静止物(例えば、マンホールやガードレールなど)と予測する。
【0052】
電子制御装置4は、候補物体のレーダ情報と物体の種類の情報に基づいて、該当する候補物体が画像処理装置3にある1フレームの画像の中のどの座標に該当するかを算出する(ステップS104)。具体的には処理の優先順位の高い候補物体のレーダ情報の距離と角度の情報により、画像処理装置3により撮影された1フレームの画像の中の座標位置と候補物体とを対応させる。また、予測した物体の種類に応じて、その座標位置を基準とした1フレームの画像の中の所定の範囲を算出する。
【0053】
電子制御装置4は予測した物体の種類に応じた画像の座標情報を画像処理装置3に送信する(ステップS105)。画像の範囲の座標情報を受信した画像処理装置3は、カメラ13を用いて撮影した1フレームの物体の種類に応じたサイズの画像範囲を切り出して、電子制御装置4に送信する。例えば、予測した物体の種類が歩行者であれば比較的小さな縦長の領域が切り出される。また、予測した物体の種類が車両であれば比較的大きな横長の領域が切り出される。なお、物体の種類の判別パターンはこれまで説明した人や車両などの物体以外にも二輪車両、電柱、歩道橋、鉄橋など様々な物体の種類に応じた判別パターンをメモリ24に記憶させることができ、これら種類の異なる物体のサイズに応じた領域を選択して切り出すことが可能である。
【0054】
電子制御装置4は画像処理装置3が送信した画像情報を処理対象領域として受信して(ステップS106)、受信した画像情報のみを対象に物体の種類判定を行う(ステップS107)。物体の種類の判定は、画像を走査判定して、対象画像の輝度の変化のある範囲を検出して、物体の種類を判定する。物体の種類の判定手法としては、処理対象領域に対応する物体の予測された種類に応じた判定手法を用いる。例えば、変化のある範囲の中心をとり、変化の範囲が対称性をみて物体の種類を判定する手法がある。また、所定の方向に走査して、変化がある点から交差する方向に走査方向を変更して、輝度の変化範囲に基づいて物体の種類を判定する手法がある。さらに、予めメモリ24に保存しているテンプレートを輝度が変化している画像の範囲に当てはめて、物体の種類を判定する手法がある。
【0055】
また、気温・湿度の変化により画像センサが検出する信号のS/N比が悪化し、弱い光の輝度の検出が困難となる場合がある。そのため、気温や湿度の変化により画像の輝度を検出する閾値を所定の値に設定することもできる。
【0056】
物体の種類判定の結果、その物体が車両制御の対象物である場合(ステップS108がYes)は、警報器17からの警報による報知を行うか否かを判断する(ステップS109)。物体が車両制御の対象でない場合は、処理を終了する(ステップS108がNo)。
【0057】
警報による報知が必要な場合(ステップS109がYes)は、警報器17から警報を出力する(ステップS110)。警報は車室内に備えているナビゲーション装置から音声による警告を行ったり、映像による警告を行う。
【0058】
警報を出力した後、または、警報による報知が必要ない場合(ステップS109がNo)は、運転介入が必要であるか否かを判断する(ステップS111)。運転介入が必要な場合(ステップS111がYes)は、ブレーキ27やステアリング37を自動的に操作して運転介入を行う(ステップS112)。運転介入の例としては、車外の物体に車両1が衝突する可能性が有る場合に、自動的にブレーキ27を操作して車両を停止させたり、物体が存在しない方向にステアリング37を自動的に操作するものがある。また、衝突前にシートベルト5を固定したり、ヘッドレスト6を固定したりすることで、衝突に備えて車両1のドライバーなどの乗員の安全を確保できる。
【0059】
運転介入が必要でない場合(ステップS111がNo)は、処理を終了する。例えばドライバーの操作により車外の物体との衝突が避けられる場合である。
【0060】
以上のように本実施の形態の物体検出システム10においては、電子制御装置4が、レーダ情報に基づく検出対象の候補物体の画像中の座標を導出するとともに、レーダ情報に基づいて候補物体の種類が予測する。そして、電子制御装置4は、画像中における候補物体の導出された座標の周辺における候補物体の予測された種類に応じたサイズの領域を処理対象領域として指定し、その画像領域について画像処理装置3に切り出しを行わせる。この切り出された画像領域のみを対象に物体の検出処理がなされる。これにより、電子制御装置4のCPU14が行う画像処理は検出対象とする物体が存在する画像領域に限定され、物体の種類を判定する画像処理負荷を軽減する。また、レーダ装置を採用したことにより、それ自体に負荷がかかるが、画像処理領域を限定することによる画像処理負荷が大幅に減少することから、物体検出システム全体の処理負荷の軽減が可能となる。さらに、電子制御装置4のCPU14の処理負荷軽減により、車外の物体に対する車両制御を迅速に行うことができる。
【0061】
また、レーダ装置2からの情報により予め物体の種類を予測して、電子制御装置4のCPU14による物体の種類判定において予測された種類に応じた判定手法を用いる。このため、物体の種類判定を何度もやり直す必要はなく物体の種類判定が迅速に行える。さらに、電子制御装置4のCPU14の処理負荷軽減により、物体に対する車両制御を迅速に行うことができる。
【0062】
また、候補物体が複数あるときには、複数の候補物体のうち車両との距離の近い順から処理対象とするため、車両制御の対象となる可能性の高い物体から順に検出することができ、ドライバーなど乗員の安全確保を迅速に行うことが可能となる。
【0063】
[実施の形態2]
<2−1.構成>
図7はナビゲーション装置と各種センサを備えた物体検出システムのブロック図であり、実施の形態1の図2に示したブロック図と主に異なる点は、ナビゲーション装置8と車速センサ19、ステアリングセンサ20、ヨーレートセンサ21の各種センサを新たに備えた点である。以下、実施の形態1に記載した動作内容は省略し、異なる動作内容について述べる。
【0064】
ナビゲーション装置8は、表示部18とナビゲーション制御部28を備えており、表示部18はドライバーなどの乗員に対して映像や音声で地図などのナビゲーション情報を通知したり、音楽やデジタルTVなどのオーディオコンテンツ情報を提供する。ナビゲーション制御部はこれらの情報をドライバーなどの乗員に提供するための制御を行う。
【0065】
車速センサ19は車両の速度情報を電子制御装置4に送信する。ステアリングセンサ29は車両のステアリングの舵角を検出して電子制御装置4に送信する。ヨーレートセンサ39は車両1の車体の向きの変化を角速度で検出して電子制御装置4に送信する。電子制御装置4はこれらの車両の走行状態に応じて、車両制御の対象とする候補物体の検出を行う。
【0066】
次にナビゲーション装置8および各種センサを用いて行う候補物体検出の具体例について、図8のカーブでのレーダ装置とカメラを備えた画像処理装置による物体検出範囲を示した図、および、図9のカーブでのカメラを備えた画像処理装置による物体検出の画像を示した図を用いて説明する。
【0067】
図8では車両1に備えられたレーダ装置2の物体検出範囲R1とカメラを備えた画像処理装置3のC1、C2の物体検出範囲が重なっている。レーダ装置2および画像処理装置3の物体検出範囲には人201とガードレール202が候補物体として入っている。ここで、車両1に備えられたナビゲーション装置4は車両1の進行方向の道路が車両1の現在の位置から所定の距離進むとカーブしていることを検出している。ここで本実施形態のカーブ半径は130m以下の場合をカーブとするが、これに限らず、本実施形態に述べる効果を有する場合は本実施形態のカーブ半径の値以下のカーブであってもよい。
【0068】
レーダ装置2のレーダ情報として、車両1との距離が例えば20m以上離れているような所定の距離を有し、絶対速度がゼロであり、角度は略進行方向正面であり、反射強度が強いピーク(ピークを検出する閾値を超えるパワーを有するピーク)が存在していれば、電子制御装置4から画像処理装置3への所定範囲を切り出す候補物体の対象としてこのレーダ情報を選択しない、または、候補物体として処理の優先順位付けを行わない。
【0069】
自車線内のカーブの入り口手前でカードレール202のような静止物は車両1の制御対象としなくとも、ドライバーのステアリング操作で回避できる。自動的な運転介入を行うことにより、カーブの角度に沿ったステアリングの操作よりも余計にステアリングを操作するような誤った車両制御を行う危険性がある。したがって、車両1がカーブに差し掛かる前に検出した自車線内のガードレールのような静止物は、車両制御の対象とはしない。
【0070】
なお、ガードレール202のような絶対速度がゼロの静止物体のレーダ情報を車両制御の候補物体として選択しない条件としては、ナビゲーション装置4の情報により、その物体が自車線上にあり、かつ、車両1に備えられたステアリングセンサ29、または、ヨーレートセンサ39によって車両1がカーブに沿って走行していないことを示していることも含まれる。ここで、自車線上とは本実施例では一例として車両が所定の車線を走行している場合に、その走行方向の両端にある白線から白線の距離約2.5mの間に車両1が存在する状態をいうが、これに限られず本実施形態の効果を有する範囲が含まれる。
【0071】
さらに、車両1がカーブの入り口に差し掛かり、ドライバーがステアリングをカーブの角度に沿って操作した場合は、その車の旋回の度合いに応じて、ステアリングセンサ29、ヨーレートセンサ39が車両1のカーブ走行状態を示す。車両1がカーブに沿って走行すると、レーダ装置2の検出範囲R2、および画像処理装置の検出範囲C1もカーブの角度に沿って移動する。その結果、レーダ情報により候補物体を検出していれば、車両1との距離や相対速度の情報に応じて優先順位付け行い、候補物体とし画像処理装置3が対象の範囲画像を切り取って、電子制御装置4で物体の種類判定を行い、車両制御の対象物であれば、その物体の状況に応じた車両制御を行うことが可能である。
【0072】
また、本実施形態の変形例としては、車両1が自車線上を走行中に車速センサ19からの車両1の速度情報を取得すると、速度と制動距離の関係から車両1の進行方向における対象物との衝突の可能性がある場合は、その物体を候補物体の処理の優先順位を高くして物体の種類判定を行い、迅速な車両制御を行うことができる。
【0073】
具体的には、ナビゲーション装置4の情報から路面が凍結しているような場合は、車速センサ19による車両1の速度情報と制動距離の関係を算出する。特に凍結路面では乾燥路面よりも制動距離が2倍から3倍以上伸びることを含めて、乾燥路面では優先順位を低くしているような、車両1との距離が他の候補物体よりも離れているレーダ情報の候補物体の処理の優先順位を高くする。
<2−2.動作>
図10は走行情報を用いた電子制御装置の処理フローチャートである。電子制御装置4はレーダ装置2からレーダ情報を受信する(ステップS201)。
【0074】
次に、ナビゲーション装置4、車速センサ19、ステアリングセンサ29、または、ヨーレートセンサ39などの各種センサから車両1の走行情報を受信する(ステップS202)。ここで、走行情報とは上述のようにナビゲーション装置4から得られる道路のカーブや凍結の状態のほか道路の車線数、道路勾配、路面温度、気温、湿度などが含まれる。さらに、車両1の走行状態とは車両の速度や舵角が情報などである。
【0075】
電子制御装置4は、ナビゲーション装置4、および、各種センサからの走行情報を候補物体の優先順位付けの情報とともに、レーダ情報に含まれる距離の情報に基づいて、複数の候補物体に対して優先順位付けを行う(ステップS203)。
【0076】
具体的には、上述のように自車線上の進行路の所定の距離にカーブが存在する場合は、自車線上のガードレールなどのレーダ情報は電子制御装置4の物体の種類判定の対象としないように、候補物体として選択しない。または、候補物体としての処理の優先順位を他の候補物体よりも下げる。
【0077】
また、自車線上の道路が凍結している場合は、車両の速度と制動距離を考慮して、他の候補物体と比較して車両との距離が所定距離以上離れているレーダ情報も候補物体として、処理の優先順位を他の候補物体よりも上げる。
【0078】
次に電子制御装置4は処理の優先順位の高い候補物体からその物体の種類を予測し(ステップS204)、候補物体のレーダ情報と物体の種類の情報とに基づいて、該当する候補物体が画像処理装置3にある1フレームの画像の中のどの座標に該当するかを算出する(ステップS205)。
【0079】
電子制御装置4は予測した物体の種類に応じた画像範囲の座標情報を画像処理装置3に送信する(ステップS206)。画像の範囲の座標の情報を受信した画像処理装置3は、カメラ13を用いて撮影した1フレームの物体の種類に応じた画像範囲を切り出して、電子制御装置4に送信する。
【0080】
電子制御装置4は画像処理装置3が送信した画像情報を受信して(ステップS207)、物体の種類判定を行う(ステップS208)。
【0081】
物体の種類判定の結果、その物体が車両制御の対象物である場合(ステップS209がYes)は、警報器17からの警報による報知を行うか否かを判断する(ステップS210)。物体が車両制御の対象でない場合は(ステップS209がNo)、処理を終了する。
【0082】
警報による報知が必要な場合(ステップS210がYes)は、警報器17から警報を出力する(ステップS211)。警報は図示しない車室内ナビゲーション装置から音声による警告を出力したり、映像による警告を行う。
【0083】
警報を出力した後、または、警報による報知が必要ない場合(ステップS210がNo)は、運転介入が必要であるか否かを判断する(ステップS212)。運転介入が必要な場合(ステップS212がYes)は、ブレーキ27やステアリング37を自動的に操作して運転介入を行う(ステップS213)。
【0084】
運転介入が必要でない場合(ステップS212がNo)は、処理を終了する。例えばドライバーの操作により車外の物体との衝突が避けられる場合である。
【0085】
以上のように、本実施形態では、ナビゲーション装置8、または、各種センサから得られる車両の走行状況を示す走行情報をレーダ装置の情報とあわせて用いることで、車両1が走行する状況に応じて、検出対象とする物体の存在する処理対象領域を選択できる。これにより、電子制御装置4のCPU14の処理負荷が軽減されるとともに、車両1の走行状態に応じた車両制御を迅速に行うことができる。
【0086】
また、車両制御の対象となる可能性の高い物体から順に検出することができ、ドライバーなど車両の乗員の安全確保を迅速に行うことができる。
【符号の説明】
【0087】
1・・・・・ 車両
2・・・・・ レーダ装置
3・・・・・ 画像処理装置
5・・・・・ シートベルト
6・・・・・ ヘッドレスト
12・・・・ アンテナ
13・・・・ カメラ
14・・・・ CPU
17・・・・ 警報器
22・・・・ レーダ制御部
23・・・・ カメラ制御部
27・・・・ ブレーキ
37・・・・ ステアリング
【特許請求の範囲】
【請求項1】
車両に設けられ前記車両外の物体の位置と速度を検出するレーダ装置からのレーダ情報と、前記車両に設けられ前記レーダ装置の検出範囲と重なる領域を撮像するカメラで得られた画像とに基づいて、前記車両外の検出対象を検出する物体検出装置であって、
前記レーダ情報に基づく前記検出対象の候補物体の前記画像中の座標を導出する導出手段と、
前記レーダ情報に基づいて、前記候補物体の種類を予測する予測手段と、
前記画像中における前記候補物体の導出された座標の周辺の、当該候補物体の予測された種類に応じたサイズの領域を処理対象領域に設定する設定手段と、
前記画像中の前記処理対象領域のみを対象に前記検出対象を検出する検出手段と、
を有することを特徴とする物体検出装置。
【請求項2】
請求項1記載の物体検出装置において、
前記検出手段は、前記処理対象領域から前記検出対象を検出するときに、当該処理対象領域に対応する前記候補物体の予測された種類に応じた判定手法を用いることを特徴とする物体検出装置。
【請求項3】
請求項1または2記載の物体検出装置において、
前記車両の走行状況を示す走行情報を取得する取得手段と、
前記走行情報に基づいて、前記レーダ情報に基づく前記候補物体の一部を処理対象として選択する手段、
をさらに備えることを特徴とする物体検出装置。
【請求項4】
請求項1乃至3のいずれか記載の物体検出装置において、
前記導出手段、前記予測手段、前記設定手段、および、前記検出手段のうち少なくとも1の手段は、
前記レーダ情報に基づく前記候補物体が複数あるとき、複数の前記候補物体のうちの前記車両との距離の近い順から処理対象とすることを特徴とする物体検出装置。
【請求項5】
車両に設けられた前記車両外の物体の位置と速度を検出するレーダ装置からのレーダ情報と、前記車両に設けられ前記レーダ装置の検出範囲と重なる領域を撮像するカメラで得られた画像とに基づいて、前記車両外の検出対象を検出する物体検出方法であって、
前記レーダ情報に基づく前記検出対象との候補物体の前記画像中の座標を導出する工程と、
前記レーダ情報に基づいて、前記候補物体の種類を予測する工程と、
前記画像中における前記候補物体の導出された座標の周辺の、当該候補物体の予測された種類に応じたサイズの領域を処理対象領域に設定する工程と、
前記画像中の前記処理対象領域のみを対象に前記検出対象を検出する工程と、
を有することを特徴とする物体検出方法。
【請求項6】
物体検出システムであって、
車両に設けられ前記車両外の物体の位置と速度を検出するレーダ装置と、
前記車両に設けられ前記レーダ装置の検出範囲と重なる領域を撮像するカメラと、
レーダ装置からのレーダ情報と、カメラで得られた画像とに基づいて、前記車両外の検出対象を検出する請求項1ないし4のいずれかに記載の物体検出装置と、
を備えることを特徴とする物体検出システム。
【請求項1】
車両に設けられ前記車両外の物体の位置と速度を検出するレーダ装置からのレーダ情報と、前記車両に設けられ前記レーダ装置の検出範囲と重なる領域を撮像するカメラで得られた画像とに基づいて、前記車両外の検出対象を検出する物体検出装置であって、
前記レーダ情報に基づく前記検出対象の候補物体の前記画像中の座標を導出する導出手段と、
前記レーダ情報に基づいて、前記候補物体の種類を予測する予測手段と、
前記画像中における前記候補物体の導出された座標の周辺の、当該候補物体の予測された種類に応じたサイズの領域を処理対象領域に設定する設定手段と、
前記画像中の前記処理対象領域のみを対象に前記検出対象を検出する検出手段と、
を有することを特徴とする物体検出装置。
【請求項2】
請求項1記載の物体検出装置において、
前記検出手段は、前記処理対象領域から前記検出対象を検出するときに、当該処理対象領域に対応する前記候補物体の予測された種類に応じた判定手法を用いることを特徴とする物体検出装置。
【請求項3】
請求項1または2記載の物体検出装置において、
前記車両の走行状況を示す走行情報を取得する取得手段と、
前記走行情報に基づいて、前記レーダ情報に基づく前記候補物体の一部を処理対象として選択する手段、
をさらに備えることを特徴とする物体検出装置。
【請求項4】
請求項1乃至3のいずれか記載の物体検出装置において、
前記導出手段、前記予測手段、前記設定手段、および、前記検出手段のうち少なくとも1の手段は、
前記レーダ情報に基づく前記候補物体が複数あるとき、複数の前記候補物体のうちの前記車両との距離の近い順から処理対象とすることを特徴とする物体検出装置。
【請求項5】
車両に設けられた前記車両外の物体の位置と速度を検出するレーダ装置からのレーダ情報と、前記車両に設けられ前記レーダ装置の検出範囲と重なる領域を撮像するカメラで得られた画像とに基づいて、前記車両外の検出対象を検出する物体検出方法であって、
前記レーダ情報に基づく前記検出対象との候補物体の前記画像中の座標を導出する工程と、
前記レーダ情報に基づいて、前記候補物体の種類を予測する工程と、
前記画像中における前記候補物体の導出された座標の周辺の、当該候補物体の予測された種類に応じたサイズの領域を処理対象領域に設定する工程と、
前記画像中の前記処理対象領域のみを対象に前記検出対象を検出する工程と、
を有することを特徴とする物体検出方法。
【請求項6】
物体検出システムであって、
車両に設けられ前記車両外の物体の位置と速度を検出するレーダ装置と、
前記車両に設けられ前記レーダ装置の検出範囲と重なる領域を撮像するカメラと、
レーダ装置からのレーダ情報と、カメラで得られた画像とに基づいて、前記車両外の検出対象を検出する請求項1ないし4のいずれかに記載の物体検出装置と、
を備えることを特徴とする物体検出システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】

【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−27457(P2011−27457A)
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願番号】特願2009−171014(P2009−171014)
【出願日】平成21年7月22日(2009.7.22)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願日】平成21年7月22日(2009.7.22)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]