
Fターム[5J070BF19]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | カーブ走行路に関するもの (40)
Fターム[5J070BF19]に分類される特許
1 - 20 / 40
先行車検知装置
【課題】継続して存在する先行車が一時的に先行車と認識できなくなった場合に、その車両を先行車として早期に再認識することが可能な先行車検知装置の提供。
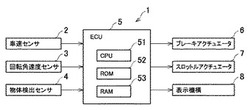
【解決手段】ECU5は、物体検知センサ2が今回検出した検出物体が前回よりも以前に検出された既検出の物体と同一であると推定した場合、その既検出の先行車の先行車適合情報を今回検出した物体の先行車適合情報として設定する引継ぎ処理を実行し、引き継がれた先行車適合情報に基づいて先行車の認定を行う。
(もっと読む)
道路端検出装置

【課題】自車両が走行する道路の道路端を検出する道路端検出装置において、道路端を検出する際の精度を向上できるようにする。
【解決手段】認識システムでは、道路端位置認識処理にて、自車両の進行方向における道路端の候補となる複数の検出点、および自車両の挙動の検出結果を取得する(S110)。そして、自車両が各検出点の真横まで移動したと仮定したときにおける自車両の位置に対する各検出点の位置を表す通過位置を、自車両の挙動に基づいて検出点毎に演算し、演算された各通過位置を、自車両と各検出点との距離に応じて予め設定された単位距離毎に複数のグループに振り分けたヒストグラムを生成する(S120)。このヒストグラムにおいて最も多くの通過位置が振り分けられたグループの代表値を自車両に対する道路端の位置として設定する(S130)。
(もっと読む)
車両制御装置
【課題】より確実に先先行車を検出してロストを防止する確率を高めることにより、他車両の位置に応じた処理における利便性を高めることができる車両制御装置を提供する。
【解決手段】車両制御装置10は、自車両Cの進行方向に照射したミリ波の先先行車両Bからの反射波を受信して得られる先先行車両Bの位置情報に基づいて自車両Cの速度制御を行なう車両制御装置において、先先行車両Bを検出できていないロスト状態が発生中であるか否かを検知するロスト検知部1と、ロスト検知部1によりロスト状態が発生中であると検知された場合に、自車両Cの周囲に反射物が存在するか否かを判定する反射判定部2と、反射判定部2により反射物が存在すると判定された場合に、自車両Cの走行軌道を反射物方向へ変更させる車両制御部3と、を備える。
(もっと読む)
物体検出装置、情報処理方法、および、情報処理システム
【課題】カメラで撮影した画像内の物体の種類を判定する場合の電子制御装置の処理負荷を軽減する技術を提供する。
【解決手段】レーダ装置により検出したレーダ情報に基づいて、物体の種類を予測する。その予測した物体の種類をもとにカメラで撮影した1フレームの画像の所定の画像範囲を切り出して、電子制御装置により物体の種類判定を行う。これにより電子処理装置の画像による物体の種類判定の処理負荷が軽減される。
(もっと読む)
道路曲率見積もりシステムおよび自動車目標状態見積もりシステム
【課題】道路の曲率を見積もる。
【解決手段】第一のカルマンフィルター(52)は、ヨーレートおよび速さの測定値をホスト車両内のそれぞれのセンサー(16、18)の測定値から見積もり、第二のカルマンフィルター(54)はそれらから道路曲率のクロソイドモデルのパラメータを見積もる。レーダーシステム(14)からのレンジ、レンジレートおよびアジマス角の測定値は、目標車両36の状態の非束縛の見積もりを提供するために拡張されたカルマンフィルター(56)によって処理される。関連する道路に束縛された目標の状態の見積もりは一または二以上の道路のレーンについて発生され、独立でまたは組み合わせで非束縛の見積もりと比較される。もし束縛された目標の状態の見積もりが非束縛の見積もりに対応しているなら、目標車両の状態は非束縛及び束縛の見積もりの統合で発生され、そうでないならば、非束縛の見積もりのみで与えられる。
(もっと読む)
干渉防止レーダ装置
【課題】電波を送信する他の装置との電波干渉をより確実に防止することのできる干渉防止レーダ装置を提供する。
【解決手段】ミリ波を発信して当該ミリ波に対する反射波を受信するレーダセンサ1を有し、受信された当該反射波により周囲環境を検出する干渉防止レーダ装置10であって、ミリ波を発信する他のレーダ装置と同期してレーダセンサ1によりミリ波を発信するために用いられる時刻同期信号を受信する同期信号取得部42と、同期信号取得部42により受信された時刻同期信号に対応する方角に向けてミリ波が発信されるように、レーダセンサ1を制御する時分割駆動制御部41と、を備える。この干渉防止レーダ装置10により、ミリ波を送信する他の装置との電波干渉をより確実に防止することができる。
(もっと読む)
レーダ装置
【課題】レーダビームの上下左右方向の軸ずれ量を算出することができるレーダ装置を提供する。
【解決手段】レーダ装置1は、レーダ2と、このレーダ2と接続されたECU3とを備えている。ECU3は、レーダ2によって検出されたデータに基づいて、自車両と同一のレーンの直線路において前方正面を走行する先行車両を抽出する。そして、ECU3は、その先行車両について自車両に対する先行車両の距離及び上下左右方向がレーダ2によって所定回数検出された場合に、その所定回数検出されたデータに基づいてレーダビームの上下左右方向の角度ずれ量Δθx,Δθy(軸ずれ量)を算出する。
(もっと読む)
物体位置検出装置
【課題】 自車両の後方に存在する物体が位置する車線を精度良く推定できる物体位置検出装置を提供すること。
【解決手段】 自車両の後方に存在する他車両等の後方物体が位置する車線を推定する物体位置検出装置1であって、バッファ更新処理部82によって自車両の過去の走行位置を記憶し、他車両絶対位置演算部83によって後方物体の位置を検出し、自車両の過去の走行位置と後方物体の後方物体の位置との相対位置関係に基づいて、他車両車線推定部85によって後方物体が位置する車線を推定する。よって、自車両が走行した車線に対する後方物体の位置が推定できる。このため、後方物体が位置する車線を精度良く推定することができる。
(もっと読む)
道路形状推定装置
【課題】道路形状の推定精度の向上が図れる道路形状推定装置を提供すること。
【解決手段】車両Mに設けられるレーダ1により車両Mの進行方向側に存在する物体を検出し、検出された物体の検出点に基づいて道路形状を推定する道路形状推定装置であって、レーダ1が所定の周期で繰り返して物体の検出点の検出を行い、今回検出した物体の検出点のほか前回以前に検出した物体の検出点を用いて検出点の点列の形状に基づいて道路形状を推定する。これにより、過去の物体情報により現時点での物体情報の不足を補うことができる。このため、道路形状の推定精度の向上が図れる。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】車両の前側方監視用レーダ装置において目標物体の位置を精度よく検出する。
【解決手段】 車両に搭載されるとともに前記車両の側方の領域を含む走査領域を走査するレーダ送受信機の信号処理装置は、前記車両の前側方をY軸、前記Y軸と交差する方向をX軸としたときに前記走査領域における目標物体の位置のX、Y座標を検出する位置検出手段と、過去の検出サイクルで検出された前記目標物体の位置の前記検出サイクルあたりのX座標差分値とY座標差分値とに基づき、当該目標物体の位置のX、Y座標を予測する位置予測手段と、前記検出された位置のX、Y座標が前記予測された予測位置のX、Y座標それぞれの許容範囲に含まれるときに、当該検出された位置を確定する位置確定手段とを有するので、X座標の差分値が大きい目標物体の位置を精度良く予測でき、位置検出制度を向上できる。
(もっと読む)
衝突予測装置
【課題】 物体との衝突部位の予測精度を向上させることができる衝突予測装置を提供する。
【解決手段】 衝突予測装置は、自車両周辺の障害物を検出すると共に、自車両が走行する道路のカーブ半径を推定し、その推定カーブ半径の微分値を算出する。そして、衝突予測装置は、推定カーブ半径の微分値をR補正係数で補正して推定カーブ半径微分係数を算出し、その推定カーブ半径微分係数を用いて、自車両の部位区間毎に蓄積された衝突確率の積算値を補正する。そして、衝突予測装置は、自車両における障害物との衝突部位を予測し、上記の推定カーブ半径微分係数を用いて、衝突確率の積算上げ幅を設定する。そして、衝突予測装置は、該当する衝突部位における衝突確率の積算値に対して今回の衝突確率を積算上げ幅の分だけ加算し、衝突部位毎の衝突確率の積算値に基づいて、自車両のある部位区間に障害物が衝突するかどうかを判定する。
(もっと読む)
物体検出装置
【課題】複数の移動物体が近接している場合であっても、各移動物体との正確な距離を検出する。
【解決手段】物体検出ECU1は、粗決定サーチ関数及び精決定サーチ関数に基づいて、移動物体毎に対応する遅延時間を特定できるか否かの判定を行う時間判定部106と、ステレオカメラ23を介して、複数の移動物体を含む画像を取得する画像取得部108と、遅延時間を特定できないと判定された場合に、取得された画像に基づいて、遅延時間を特定できないと判定された移動物体である特定困難物体に対応する粗決定サーチ関数及び精決定サーチ関数を補正する関数補正部112と、補正された粗決定サーチ関数及び精決定サーチ関数に基づいて、特定困難物体に対応する遅延時間を特定する遅延時間特定部113と、特定された遅延時間に基づいて、特定困難物体との距離を求める距離算出部114と、を備える。
(もっと読む)
信号処理装置、レーダ装置、及び、信号処理方法
【課題】受信領域端部に実在する物体からの受信信号から検出される方位角のうち、受信領域中心部で誤検出された方位角を誤りと判定するとともに、受信領域端部において検出される方位角を正しいと判定する。
【課題を解決するための手段】
基準方向にレーダ信号を送信し、所定間隔離間したアンテナ対で受信したレーダ信号対の位相差から物体の方位角を検出する信号処理装置において、前記受信信号対の強度が、当該受信信号対から検出された前記方位角と前記距離との組合せに対応する基準値以上のときに、当該方位角が正しいと判定し、前記強度が前記基準値未満のときに当該方位角が誤りと判定する。このとき基準値は、前記距離に応じて異なるとともに、前記方位角に応じて異なるので、受信領域中心部内で誤検出された方位角を誤りと判定するとともに、受信領域端部において検出される方位角を正しいと判定することができる。
(もっと読む)
先行車検出装置およびこれを用いた車速制御装置
【課題】 先行車の車線変更を検出できる先行車検出装置およびそれを用いた車速制御装置を提供する。
【解決手段】 先行車検出装置100は、先行車の自車両に対する進行角度である背面角度を検出する先行車横位置および車体傾き演算記憶部303と、自車両の直進状態を検出し、自車両の直進中に背面角度が増加後減少した場合、先行車は車線変更したと判定する先行車および走行路判定部302と、を備える。
(もっと読む)
車両における交通環境を検出するためのレーダセンサ
【課題】交通状況に応じて車両用レーダセンサの送信および/または受信動作におけるセンサ感度を調整可能にする。
【解決手段】調整可能な送信および/または受信増幅器22、30と、送信および/または受信ゲインを調整するための調整装置34とを備えるレーダセンサにおいて、アナログ/デジタル変換器24を通過したデジタル受信信号を解析回路26において解析し、車両環境デジタル測定データを連続して評価して、目下の評価に従って調整装置34に作用する評価装置32を備えた。
(もっと読む)
前方車両検出装置及び制駆動力制御装置
【課題】前方車両との位置関係を検出する場合に、前方車両が、自車両の走行する車線上を走行しているか否かをより確実に判定できる前方車両検出装置を提供する。
【解決手段】レーダ装置を備え、前記レーダ装置の検出結果に基づいて、自車両が走行する車線と同一車線における前記自車両の前方を走行する前方車両を検出する前方車両検出装置であって、前記レーダ装置における予め定められた所定幅を有する検索領域で検出された車両が、前記自車両が走行する車線以外の領域に存在するか否かを判定する走行車線判定手段(S8)を備え、前記走行車線判定手段の判定結果に基づいて、前記検索領域で検出された前記車両が、前記自車両が走行する車線と同一車線を走行しているか否かが判定される。
(もっと読む)
信号処理装置及び信号処理方法
【課題】レーダ信号の信号処理装置において、物標の誤検出を防止しつつ、迅速に検出結果を出力する。
【解決手段】信号処理装置は、レーダ装置から複数の角度方向に送信された送信信号と、物標により反射されて前記車載レーダ装置に受信された受信信号から物標の角度方向を検出する物標検出部と、過去に検出された角度方向と今回検出された角度方向との連続性の有無を判定する連続性判定部を有する。そして、前記物標の横位置が所定の範囲内であり、且つ前記所定範囲内の物標数が所定数以下のときは、誤検出の可能性が大きいので連続性の判定回数を多くして誤検出を防止し、それ以外のときは、誤検出の可能性が小さいので連続性の判定回数を少なくして、検出結果をより早く出力できる。
(もっと読む)
車載用レーダ装置
【課題】先行車との車間距離を目標車間距離に維持すべく自車の制駆動力を制御する機能を備えるACCシステムにおいて、S字カーブ等においても、先行車を適確に捕捉しえるようにする。
【解決手段】ヨーレートセンサおよび車速検出手段の検出信号に基づいて自車の進行方向に沿う曲率を推定する手段23、自車進行路の車線幅を設定する手段24、自車進行路の曲率と車線幅とから自車進行路の車線形状を設定する手段25、前方車の位置を検出する手段21、自車進行路の車線形状上の最も近い前方車を所定の車間距離を保つべき対象の先行車と確定する手段26、ヨーレートセンサの検出誤差を補正する手段(ヨーレートの検出値=推定曲率に対応するゲイン×ヨーレートの出力値に補正する手段31)、を備える。
(もっと読む)
車載用レーダ装置
【課題】先行車との車間距離を目標車間距離に維持すべく自車の制駆動力を制御する機能を備えるACCシステムにおいて、S字カーブ等においても、先行車を適確に捕捉しえるようにする。
【解決手段】ヨーレートの検出信号と車速の検出信号とから自車の進行方向に沿う中心線の曲率を推定する手段23、自車の進行方向に沿う曲率とその中心線に与える水平方向の車線幅とから自車進行路の車線形状を設定する手段25、前方車との距離および角度を検出する手段21、自車の進行方向に沿う曲率と前方車との距離に応じて車線形状の水平方向の車線幅を変更する手段(図8のS8)、自車進行路の車線形状上の最も近い前方車を所定の車間距離を保つべき対象の先行車と確定する手段26、を備える。
(もっと読む)
軸調整機能付き車載レーダ
【課題】電波放射方向の軸調整を簡単に行うことができる軸調整機能付き車載レーダを提供する。
【解決手段】モータ30により車載レーダ10の仰角方向のアンテナ12の角度を変化させつつ車載レーダから電波を放射し、そのときの距離に対し、車載レーダ10で受信した電波の受信強度を記憶装置40に順次記憶させる。そして、記憶させた各距離における平均電波強度の和を算出し、算出した平均電波強度の和と現在の他車両105との距離における電波強度の和とを比較し、前回の平均電波強度の和の方が大きければ、モータ30によって車載レーダ10のアンテナ12の角度を前回の角度とし、小さければ、今回の角度とするようにアンテナ12の角度を調整する。平均電波強度の和の算出の際には、他車両105までの距離が遠いほど大きな重みを付ける。
(もっと読む)
1 - 20 / 40
[ Back to top ]