
国際特許分類[G01S7/62]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | グループ13/00,15/00,17/00による方式の細部 (3,965) | グループ15/00による方式のもの (803) | 表示装置 (65) | 陰極線管表示 (50)
国際特許分類[G01S7/62]に分類される特許
1 - 10 / 50
魚群探知装置
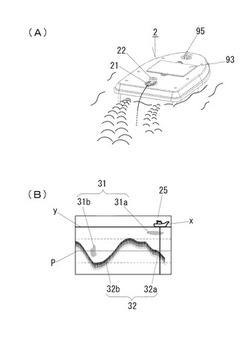
【課題】遠隔操作可能なラジコンボートを用いて魚群を探知する構成で、該魚群のポイントを容易に特定できる魚群探知装置を提案する。
【解決手段】送受波器を備えたラジコンボート2を右旋回すると、画像表示器の反響波表示領域25の右側から左側に向かって過去反響波情報31b,32bを時系列的に表示し、左旋回すると、該反響波表示領域25の左側から右側に向かって過去反響波情報を時系列的に表示するように、左右方向の時間軸線P方向を自動的に反転表示するようにしたことによって、旋回するラジコンボート2の進行方向と反響波表示領域25の時間軸線Pの進行方向とが同じ向きとなるため、操縦者がラジコンボート2から目を離した場合にも、ラジコンボート2の航跡をイメージし易く、魚群を探知したポイントを特定し易い。
(もっと読む)
水中映像取得装置

【課題】 超音波を用いた水中映像取得装置において、自立型無人潜水器に搭載するためには装置の小型化が必須である。また、運用時間延長のために低消費電力化、移動物体観察のために高フレームレート化、小型反射体観察のための高分解能化が、実用化への障壁となる。
【解決手段】 球状の音響レンズ、あるいは球状の音響レンズと同等な効果を発揮する音響レンズを設けることで、音響レンズのみで到来波の垂直および水平方向に分解することを可能とする。音響レンズ通過後の超音波を検出することにより、反射波の到来方向を知りイメージングが可能となる。また、小型で高分解能、広視野角な音響レンズを提供する。さらに、低消費電力かつ、高フレームレートな水中映像取得装置を提供する。
(もっと読む)
音源方向推定方法、音源方向推定装置、及び、音源推定用画像の作成装置
【課題】反射音の大きい場であっても直接音の音源方向を容易にかつ精度よく推定できるとともに、衝撃音についても的確に抽出できる方法とその装置を提供する。
【解決手段】互いに交わる2つの直線上に配置された第1及び第2のマイクロフォン対(M1,M3)及び(M2,M4)を用いて採取した音圧信号からマイクロフォンM1,M3間の音の到達時間差D13とマイクロフォンM2,M4間の音の到達時間差D24とを算出して音源方向を推定する際に、解析区間の長さが0.1msec.〜10msec.である極短時間高速フーリエ変換をN回行うとともに、M1,M3間及びM2,M4間のクロススペクトルpn13,pn24とその振幅値wn13,wn24とを求め、これらクロススペクトルpn13,pn24を振幅値wn13,wn24により加重平均して得られた加重平均クロススペクトルP13,P24から到達時間差D13,D24を算出するようにした。
(もっと読む)
魚探映像表示装置、魚群探知装置、目的地指定プログラム、及び目的地指定方法
【課題】魚探映像を表示するとともに、過去に取得した魚探映像が示す位置を目的地とする自動操舵を簡単な操作で行わせることができる魚探映像表示装置を提供する。
【解決手段】タッチパネル装置(魚探映像表示装置)11は、記憶部23と、表示部21と、制御部25と、を備える。記憶部23は、魚群探知機14が水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。表示部21は、探知データで構成される魚探映像を表示する。制御部25は、表示部が表示する映像に対する指定操作が行われた場合に、指定された部分を構成する探知データに対応する位置を求め、当該位置を目的地とする自動操舵を自動操舵装置16に行わせる。
(もっと読む)
魚群予測位置表示システム、水中探知装置、記憶装置、魚群予測装置、魚群予測位置表示プログラム、及び魚群予測位置表示方法
【課題】魚群の位置について精度の高い予測を行って表示する魚群予測位置表示システムを提供する。
【解決手段】魚群予測位置表示システムは、取得部81と、出力制御部82と、記憶部71と、魚群予測部74と、表示部と、を備える。取得部81は、魚群状況情報を取得する。出力制御部82は、取得部81が取得した魚群状況情報を記憶部71へ出力する。記憶部71は、出力制御部82が過去に出力した複数の魚群状況情報で構成されるデータベースを有する。魚群予測部74は、前記データベースに基づいて魚群予測位置を出力する。表示部は、魚群予測部が出力した魚群予測位置に基づく映像を表示する。出力制御部82が出力する魚群状況情報には、魚群を検出したときの情報と、魚群が検出できなかったときの情報と、が含まれる。魚群予測部84は、これらの情報の対比に基づいて魚群予測位置を出力する。
(もっと読む)
音響画像生成システム、音響画像生成方法、および音響画像生成プログラム
【課題】検知した水中音波に基づき水中目標物の正確な位置を示す音響画像を生成するシステムを提供する。
【解決手段】水中の反射音を捕捉する音響センサ部5とこの反射音に基づき水中の物体の位置を示す音響画像を生成する画像データ生成部とを備え、反響音の水平方向の指向性を示すビームを合成する指向性合成部10と、反射音を捕捉した受信時刻と各反響音ビームの指向性に基づき船舶からの方位および距離として特定される各地点における反響音のレベルを導出する信号強度導出部11と、各位置情報に対応して導出した異なる反響音のレベルを積分して得た値に色情報を割り当てて表示する表示器14を備えた。
(もっと読む)
水中探知装置、水中探知方法、および水中探知プログラム
【課題】正確に魚種を判別可能な新たな魚種判別機能を備える水中探知装置を提供する。
【解決手段】水中探知装置1の演算処理部14は、取得したエコー信号から単体魚を検出する(S101)。演算処理部14は、検出した単体魚毎に入射角を検出する(S102)。演算処理部14は、入射角を検出した単体魚の反射強度TSを算出する(S103)。演算処理部14は、算出した反射強度TSの入射角特性と、魚種毎に設定されたテンプレート特性曲線とを比較する。演算処理部14は、算出した反射強度TSの入射角特性が最も類似するテンプレート特性曲線に対応する魚種を選択する(S104)。
(もっと読む)
セクタースキャン方式のソナー
【課題】 解決しようとする問題点は、振動子を戻す数秒間は超音波の送受信はできないため、表示画像を更新できず、画像の表示がスムーズでなく、見にくいという点である。
【解決手段】 メイン制御部12の駆動パルス送信部12aから超音波振動子5をセクタースキャン及び戻り駆動するための信号をモータ駆動部6に送信し、メイン制御部12の戻り時間検出部12bで戻り時間を検出し、戻り時間割り当て部12cで戻り時間をセクタースキャンのスキャン毎に割り当て、駆動パルス送信部12aからの出力で、発信パルス送信部12dから発信器8に発信パルスを送信し、戻り時間割り当て部12cは割り当て時間調整部13に割り当て時間を送信し、割り当て時間調整部13はメモリ11からの読み出されたデジタル信号をメイン制御部12の戻り時間割り当て部12cから割り当てられた時間で調整され、画像信号変換部14は割り当て時間調整部13から出力されたデジタル信号を画像信号に変換し、表示部15で表示する。
(もっと読む)
ターゲット長計測装置、ターゲット長計測方法、およびターゲット長計測プログラム
【課題】目的物標の種類を判別することにより、この目的物標の体長の算出精度を向上させたターゲット長計測装置を提供する。
【解決手段】送信部20が、送受波器10に送信させた超音波信号のエコー信号を受信部30で受信する。魚種判別情報算出部40が、この受信したエコー信号に基づき、目的物標である魚群、または魚体を探知するとともに、その魚群、または魚体の種類を判別する。また、TS計測部51が、受信したエコー信号に基づき、この目的物標のターゲットストレングスを計測する。また、魚体長算出部50が、魚種判別情報算出部40が判別した魚種について、TS標準化値記憶部53に記憶しているターゲットストレングスの標準化値、およびTS計測部51が計測したターゲットストレングスを用いて、魚体長を算出する。
(もっと読む)
アクティブソーナー装置及びその信号処理方法
【課題】アクティブソーナー装置において、目標をより確実に検出できるようにする。
【解決手段】アクティブソーナー装置における信号処理方法は、第1の時間幅を有する音波信号を媒質に送波することと、媒質を伝播してきた音波信号を受波音波信号として受波することと、受波音波信号の時間軸を第1の時間幅よりも短い第2の時間幅で区切ったものをそれぞれ時間セルとして、各時間セルごとに、受波音波信号の到来方位と強度とを求めることと、各時間セルごとに、その時間セルを含む複数の連続する時間セル内での到来方位の方位集中度を算出し、その時間セルでの強度に方位集中度を重み付けしたものを検出値とすることと、を有する。
(もっと読む)
1 - 10 / 50
[ Back to top ]