
国際特許分類[G05B19/409]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | プログラム制御系 (7,632) | 電気式 (7,631) | 数値制御 (2,851) | マニュアルデータインプット (143)
国際特許分類[G05B19/409]に分類される特許
21 - 30 / 143
歯車形状修整入力描画装置及び歯車形状修整入力描画方法
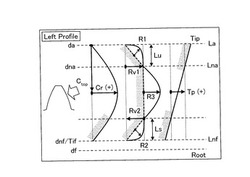
【課題】歯形、歯すじデータの簡易入力による歯形、歯すじ形状の表示及びが確認できる歯車形状修整入力描画方法を提供するにある。
【解決手段】ワーク51に砥石31を接触させてワーク51を歯車として研削する歯車加工における歯車の歯形、歯すじ修整を行う際の入力方法として、典型的な3つのパターンであるクラウニング、テーパ及びクラウニングレリービングの各修整データ(Cr,Ctop,Tp,Lu,Ls,Rv1,Rv2,R1,R2及びR3)を入力手段から入力する一方、入力手段から入力された修整データ(Cr〜R3)に基づいて演算手段221によりクラウニング、テーパ及びクラウニングレリービングを組み合わせた修整形状(図8〜図12)を演算し、演算手段221から表示手段400,500に対して出力手段223にて修整形状(図8〜図12)を出力し、表示手段400,500にて修整形状(図8〜図12)を描画することを特徴とする。
(もっと読む)
ロボット制御設定支援装置

【課題】対象ワークのCADモデルや作業内容雛形が不要で、ロボット動作の制約事項を考慮してロボット動作教示とその際の画像処理を支援する装置を提供する。
【解決手段】教示作業者との対話的な処理を行い、2次元画像・3次元データ処理部が表示した対象ワークに係る2次元画像と3次元データに対し入力に従い対象ワーク位置姿勢に対するロボット目標位置姿勢を決める画像処理を行い、制約条件算出・評価処理部が画像処理結果のロボット目標位置姿勢に従い操作されたロボットの動作の制約条件の算出評価を行い承諾入力がなければあるまで新たな入力に従い目標位置姿勢を決定する画像処理を行わせ新たな目標位置姿勢に従いロボット動作の制約条件算出評価を行い、ロボット動作モニタ部が承諾条件でのロボット動作手順を記録し、処理手順解析・再構成処理部が記録された一連の処理内容を表示し入力に従い冗長処理の統合、削除を行い再記録する。
(もっと読む)
ロボットシステム
【課題】動作プログラム内の命令を動作プログラムの変更履歴データを用いて修正する場合、従来はプログラム全体の全ての履歴を時系列に検索していくことになり、所望の変更履歴データを得るまでに多くの時間を要するという課題があった。
【解決手段】表示中の動作プログラムで命令を選択し、選択している命令に関する変更履歴を抽出して表示し、抽出された履歴情報のなかから所望の履歴情報を選択することで、選択している命令の内容を、所望の履歴情報に変更することにより、動作プログラムの変更に掛かる時間を少なくすることができる。
(もっと読む)
ロボット制御装置
【課題】ユーザ座標系を作業領域に応じて自動的に選択する場合、光電センサ等の導入が必要である。またはユーザ座標系の設定に加えて作業領域の複雑な設定が必要である。
【解決手段】アーム先端に取り付けられたツールを操作手段からの操作信号によりジョグ送りする際に、ツールが予め定められた作業領域に侵入したことを検知して、所定の軸方向を有するユーザ座標系を自動的に選択するロボット制御装置である。このロボット制御装置に作業領域自動設定手段を備える。すなわち、ユーザ座標系の原点Orを含んだ所定形状を有する領域を作業領域Qとして自動設定する。所定形状とは、原点Orを中心位置とした予め定めた半径長さDrを有する球体である(c)。または、予め定めた辺長さDx〜Dzを有する直方体である(b)。作業領域Qの中心位置となるユーザ座標系の原点は、シフトできるとさらに良い。
(もっと読む)
工作機械
【課題】たとえ経験の浅い作業者等であっても、びびり振動を抑制しやすく、ひいては歩留まりの向上等を図ることができる工作機械を提供する。
【解決手段】びびり振動が発生した際に所定のパラメータを変更することで、変更後のパラメータの値に応じた振幅Q及び周期Rで主軸2の回転速度を変動させるものにおいて、そのパラメータに係る情報をパラメータ表示制御部11が表示手段9へ表示する。したがって、作業者は表示手段9における表示を参考にしてパラメータを変更し、主軸2の回転速度の振幅Q及び周期Rを変更することができる。そのため、経験の浅い作業者であっても、従来より容易にびびり振動を抑制させることができ、ひいては歩留まりの向上も図ることができる。
(もっと読む)
工作機械の制御装置及びこれを備えた加工関連データ処理システム
【課題】工作機械の制御装置にかかる負荷を軽減することができる加工関連データ処理システムなどを提供する。
【解決手段】加工関連データ処理システム1は、工作機械2の制御装置3とデータ処理装置40とが電気通信回線5を介して接続されており、制御装置3は、NC装置11と支援装置20とから構成される。支援装置20は、データ処理装置40に連係処理信号を送信してデータ処理装置40を遠隔操作し、データ処理を行わせるとともに、データ処理装置40で行われたデータ処理結果を受信する連携処理指示部22を備え、データ処理装置40は、プログラム自動生成部44と、加工シミュレーション部45と、制御装置3から連係処理信号を受信して、制御装置3で受け付けられたデータ処理要求に対応し且つワークの加工に関連したデータ処理をプログラム自動生成部44及び加工シミュレーション部45に行わせるとともに、データ処理結果を制御装置3に送信する連係処理実行部42とを備える。
(もっと読む)
操作器の表示制御装置、及び操作器の表示制御方法
【課題】最低限の大きさの表示部しか備えられないであっても、作業者の操作性を向上させることのできる表示制御装置、及び表示制御方法を提供する。
【解決手段】ティーチングペンダント10は、画像を表示する液晶表示器14を備えている。制御部30は、ロボット70の各機能の実行に用いられる各ボタンを液晶表示器14に表示させる。制御部30は、ボタンのうち説明表示が要求されているボタンを主ボタンとして、主ボタンに関連する副ボタンを選択し、主ボタン及び副ボタンの説明を、液晶表示器14のうち主ボタン及び副ボタンが表示されていない部分に表示させる。
(もっと読む)
数値制御装置、制御プログラム及び記憶媒体
【課題】複数の操作パネルの表示を消灯した場合であっても、作業者が操作可能である操作パネルを探す必要がなく、作業効率の低下を防ぐことができる数値制御装置、制御プログラム及び記憶媒体を提供する。
【解決手段】CPUは、サブパネルの操作が有効であるときに、作業者によるサブパネルの操作がない時間が所定時間以上であるか否か判断する(S50)。作業者によるサブパネルの操作がない時間が所定時間以上であると判断した場合、CPUはメインパネル及びサブパネルのディスプレイを消灯する(S60)。CPUは、メインパネル及びサブパネルのディスプレイを消灯した場合に、サブパネルの操作を無効に切り替え、メインパネルの操作を有効にする(S70)。
(もっと読む)
プログラム作成支援システム、及び、そのコンピュータプログラム
【課題】複数の駆動手段によって駆動されるロボット装置用の駆動プログラムの作成を容易にすることができるプログラム作成支援システムを提供する。
【解決手段】プログラム作成支援システム1は、各サーボ5の接続構成を設定するための設定画面SGを表示する表示装置4と、所定の情報を記憶する制御ユニット3と、を備えている。そして、プログラム作成支援システム1は、仮想3次元空間に配置するための各サーボ5にそれぞれ対応するオブジェクトSOを生成し、設定画面SGにて設定された接続構成となるように各オブジェクトSOを配置した仮想3次元空間に基づいて2次元画像を生成し、当該2次元画像を前記設定画面SG上に表示させるものである。更に、設定画面SGに含まれる動作設定領域DSにて接続構成が設定された各サーボ5のそれぞれの動作に対応する駆動信号を生成し、各サーボ5に出力するものである。
(もっと読む)
教示データの修正システム
【課題】加工ワークの形状が変化する場合に簡易に教示データの修正が行える教示データの修正システムの提供。
【解決手段】教示点を修正する教示データの修正システムにおいて、第一の加工ワーク13を加工するための教示点に関するパラメータを記憶する記憶手段と、第一の加工ワークとは形状の異なる第二の加工ワーク14に関する画像と教示点の画像とを重ね合わせて表示をするとともに、ポインティング手段で表示画面中の位置を指定できる表示手段と、ポインティング手段で教示点に関するパラメータが変更された際に、ポインティング手段で示される表示画面中の位置と変更前の教示点の位置とに基づいて、変更後の変更教示点に関するパラメータを算出する算出手段と、記憶されたパラメータを、変更後の変更教示点に関するパラメータにより更新する更新手段と、更新後の変更教示点と第二の加工ワークに関する画像とを重ね合わせて表示させる制御手段と、を具備する。
(もっと読む)
21 - 30 / 143
[ Back to top ]