
国際特許分類[G05B19/409]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | プログラム制御系 (7,632) | 電気式 (7,631) | 数値制御 (2,851) | マニュアルデータインプット (143)
国際特許分類[G05B19/409]に分類される特許
31 - 40 / 143
ロボット教示システム
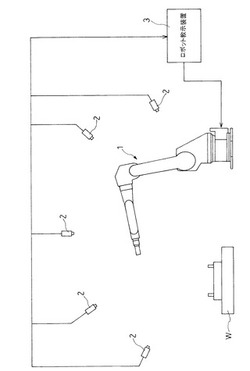
【課題】作業効率の向上化が図れ、なお且つ、危険も伴わないロボット教示システムを提供することを目的としている。
【解決手段】ワークWに対して溶接等の作業を行うロボット1と、前記ロボット1の作業現場を撮影可能な複数の多視点画像撮影カメラ2と、前記各多視点画像撮影カメラ2によって撮影された画像を取得し、且つ、その取得した画像から前記ロボット1の作業現場の任意視点画像を生成する画像生成手段と、前記生成された任意視点画像を表示する表示手段と、前記表示された画像を用いて前記ロボット1の作動を指示可能な指示手段と、前記指示手段によって指示された作動に応じて前記ロボット1を制御するロボット制御手段とを有してなる。
(もっと読む)
ピックアンドプレース機構のコントローラ

【課題】 動作実行プログラムを手動で作成することを不要にする。
【解決手段】 コントローラCは、ピックアンドプレース機構Aのコマンド等が入力可能な指令入力部201と、動作時に動作プログラム122を読み出して動作実行プログラム124に変換し同機構Aを動作させる制御部111とを備える。特に制御部111は、動作指令プログラム123がコマンド毎に予め用意され、動作プログラム122を動作実行プログラム124に変換するに当たり、動作プログラム122に含まれる動作指令に係るコマンドに対応する動作指令用プログラム123を読み出し、その後、動作指令用プログラム123に含まれた初期設定の内容を当該動作指令に係る設定に更新し、この処理を動作プログラム122に含まれる動作指令毎に行ない、動作指令用プログラム123を動作指令の入力順に繋ぎ合わせて動作実行プログラム124として取り扱う。
(もっと読む)
NC工作機械
【課題】
機械操作者の操作入力作業を簡略化すべく、機械操作者の使用方法に合わせた画面表示を設定することができるNC工作機械を提供する。
【解決手段】
機械操作者からの入力データを入力する入力データ処理部と、前記機械操作者の使用方法を予め分類し記憶する使用方法分類記憶部と、前記機械操作者の入力データに応じて前記使用方法分類記憶部に記憶された何れの使用方法であるかを判断する分類判断部と、前記使用方法の分類内容に応じて、前記機械操作者に対して操作入力を促す表示画面の表示項目のうち、入力不要項目はマスクするように予め設定された表示切替内容記憶部と、前記分類判断部の判断内容に応じて、前記表示切替内容記憶部から表示すべき表示項目を特定し、前記機械操作者の入力データに応じた表示画面となるように画面切替を行う表示切替部と、を備えた。
(もっと読む)
加工装置
【課題】 メイン操作パネルから離れた場所でメンテナンス作業を行う場合の便宜性を図った加工装置を提供することである。
【解決手段】 制御手段に接続された操作キーを有する操作パネルによって操作され、側面及び/又は背面にオペレータがメンテナンス作業を行う作業領域を備えた加工装置であって、該操作パネルは加工装置の正面に設けられたメイン操作パネルと、該作業領域近傍に設けられたメンテナンス操作パネルとからなることを特徴とする。
(もっと読む)
数値制御装置
【課題】ショートカット機能の使い勝手を向上させて、パラメータの閲覧又は編集を能率的に行う。
【解決手段】登録ショートカット情報に動作情報が設定されている場合(S12;Yes)、CPUは工作機械の動作情報を取得し、取得した動作情報に基づいて登録ショートカット情報を書き換える(S13)。登録ショートカット情報に直前操作画面情報が設定されている場合(S14;Yes)、CPUは、直前操作画面情報を取得し、取得した直前操作画面情報に基づき登録ショートカット情報を書き換える(S15)。S16においてCPUは、ショートカット先の画面の付属情報を取得し、取得した付属情報に基づき登録ショートカット情報を書き換える。S19においてCPUは、ショートカット先の画面の画面遷移情報を登録ショートカット情報に置き換え、置き換えられた画面遷移情報に基づいて画面を表示すると共に、ショートカット画面を消去する。
(もっと読む)
ロボットシステム
【課題】有線型の教示装置を引き続き使用しつつ無線通信機能を実現して導入コストを抑制できるとともに、ケーブルの取り回しの煩雑さを解消し、なおかつ作業者に無線化に伴う負担を強いることがないロボットシステムを提供する。
【解決手段】
ロボット1と、ロボット1の教示や操作に用いる教示装置3と、ロボット1および教示装置3と接続されてロボット1を制御するロボット制御装置2とを備え、教示装置3は、教示装置3とは別体であって、ケーブル41を通じて教示装置3に接続される無線化装置4を介してロボット制御装置2との間で無線通信を行う。
(もっと読む)
工作機械の制御装置
【課題】象限突起補正等に関するNCパラメータの調整を容易に行うことができる工作機械の制御装置を提供する。
【解決手段】複数のNCパラメータの調整レベルをそれぞれスライド式又はロータリ式の調整手段3で変えることができる入力部と、NCパラメータを変更することによって変化する機械の状態を図形で表した図形データを記憶するとともに、入力部で入力したNCパラメータの調整レベルに対応した図形データを生成する図形データ生成部7と、生成された図形データに基づいて図形を画面に表示する表示部4と、を具備する。
(もっと読む)
数値制御プログラムのコマンド表示装置及びコマンド表示プログラム
【課題】工作機械のための数値制御プログラムに記述されたペアコマンドの相対関係を容易に確認することを課題とする。
【解決手段】対で使用されるペアコマンドA2を一組以上含む複数のコマンドA1の中から選ばれるコマンドA1で記述され記憶部(数値制御プログラム保存領域31)に記憶されている数値制御プログラムP1に記述されたペアコマンドA2を抽出し、前記ペアコマンドA2の組PA1毎に前記抽出されたペアコマンドA2を分けて前記数値制御プログラムP1に記載された順に並べて表示する。
(もっと読む)
ペンダント
【課題】操作者の入力操作を受け付けるための入力受付画面を複数の単位画面に分割して表示する場合において、一連の入力操作を行う際に表示画面の切り替え操作を頻繁に行うことを抑制することができるペンダントを提供する。
【解決手段】制御部41は、機能設定入力部42が操作を受け付けた際に表示部12に表示されている単位画面を操作履歴画面として記憶部45に順次記憶させ、今回記憶した単位画面と前回記憶した単位画面とを順不同に組み合わせたものを特定画面パターンとして記憶部45に記憶させる。制御部41は、同じ単位画面の組み合わせの特定画面パターンが2つ以上記憶されている場合に、単位画面の相互間で画面表示の切り替えを可能とするリンクボタンを生成可能とする。
(もっと読む)
表示装置の表示画面の縦および横に配列されたキー列を用いるカーソル移動機能を有する数値制御装置
【課題】簡単な操作で画面上の釦を選択できるようにした表示装置のカーソル移動機能を提供すること。
【解決手段】表示装置118の表示画面の下側または上側に横方向に配置された横列のソフトウェアキー119Sと、該表示画面の右側または左側に縦方向に配置された縦列のソフトウェアキー119Lと、横のキー列119Sと縦のキー列119Lの個々のキーに対応する仮想上の境界線により表示装置118の表示画面を格子状に分割するための仮想上の境界線の起点となる境界データを記憶し、横のキー列119Sの1つのキーと縦のキー列119Lの1つのキーを同時に押し下げた時、同時に押し下げたキーに対応する仮想上の境界線に囲まれる領域に中心座標が存在する釦の中から1つの釦を特定し、特定された釦にカーソルを移動させることが可能な表示装置の表示画面の縦および横に配列されたキー列を用いるカーソル移動機能を有する数値制御装置。
(もっと読む)
31 - 40 / 143
[ Back to top ]