
国際特許分類[G05D1/12]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941) | 目標捜索制御 (22)
国際特許分類[G05D1/12]に分類される特許
1 - 10 / 22
リモートコントロール方法及びリモートコントロールシステム
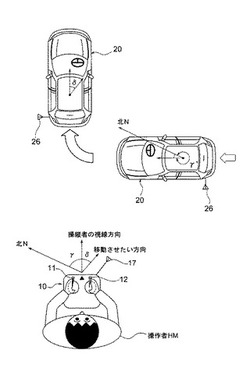
【課題】コスト高を招くことなく、目視できない状況下でも、移動体を直感的に操縦できるリモートコントロール方法及びリモートコントロールシステムを提供する。
【解決手段】移動体20、は、常に操縦者HMの視線方向(基準方向)と平行に、その前方を向けており、よって例えば視線方向に対して右に角度δの方向に進行したい場合、それに応じた操舵量だけ進行方向を操作する操縦装置のスティックを視線方向に対して右に角度δの方向に倒せばよい。
(もっと読む)
宇宙飛翔体用ターゲット

【課題】地球の夜間領域の日陰時でも、照明を行うことなく、ドッキング作業が可能となる宇宙飛翔体用ターゲットを提供する。
【解決手段】ターゲット板11と、所定数の発光素子(発光ダイオード12)とを有し、各発光素子は、ターゲット板11の略中心を交点として互いに直交する第1の直線及び第2の直線上に等間隔で配置されている。
(もっと読む)
向き計測装置、向き計測システム、向き計測方法、及び向き計測プログラム
【課題】移動装置が、自装置の方向を正確に測定できること。
【解決手段】位置積分部1162は、位置の変化量を積分して移動ロボット1の位置を示す推定位置情報を推定する。方向積分部1161は、方向の変化量を積分して移動装置の方向を示す推定方向情報を推定する。位置補正部1163は、絶対位置測定装置から受信した位置情報であって時々刻々の移動ロボット1の位置を示す絶対位置情報と、時々刻々の推定位置情報と、を同定して、方向のずれを補正する方向補正値を算出する。方向補正部1164は、方向補正値を用いて、推定方向情報が示す方向を補正する。
(もっと読む)
姿勢制御スラスタを使用してミサイルの飛行を制御する方法
ミサイルの飛行を制御する方法は、ミサイルの角度の変化率に基づく係数が閾値を超えたときを感知するために、ピッチレートジャイロスコープのようなジャイロスコープを使用することを含む。閾値を超えると、1つ以上の補償スラスタを使用して、角度の変化率を下げることが決定され得る。補償スラスタを使用すると、残留角運動速度が修正され得る。残留角運動速度は、意図した針路にミサイルを置くために使用される軌道修正操縦に起因する。更に、軌道修正操縦後にもたらされる、例えば、ミサイルのメインロケットモータによって与えられるスラストの調整不良によってもたらされる、ミサイルの機首方位における誤差を補償するために、補償スラスタが使用され得る。ピッチとヨーの方向における角度の変化を補償するために、複数の補償スラスタが使用され得る。 (もっと読む)
スキッド・トゥ・ターン飛しょう体及びスキッド・トゥ・ターン飛しょう体のロール制御方法
【課題】要求される旋回性能を低コストにて満足させるスキッド・トゥ・ターン飛しょう体を提供する。
【解決手段】ジンバル機構112をジンバル機構112の優位な回転方向と、機体の優位な旋回方向とが一致するように機体に設置する。また、追跡目標の進行方向が機体の優位な旋回方向と一致するように機体のロールを制御するロール制御装置を備える。操舵翼132の回転軸と第1のジンバル機構112の回転軸とが機体後方から見たときに45°又は0°をなしている。
(もっと読む)
自律航走体運動モニタ用ディスプレイ装置
【課題】自律航走体の運動状態を直観的にすばやく正確に把握できる自律航走体運動モニタ用ディスプレイ装置を提供する。
【解決手段】直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15を有するマルチディスプレイ12と、時間的に変化する自律航走体の運動状態を、各ディスプレイに表示させる処理装置30とを備える。処理装置30は、各ディスプレイ13〜15の画面上に自律航走体の姿勢を示す情報を表示させる。処理装置30は、各ディスプレイ13〜15の画面上に自律航走体の位置、移動軌跡及びウェイポイントを示す情報を表示させてもよい。
(もっと読む)
無人飛行物体を着陸させるために、プラットフォーム、特に海軍プラットフォームへの接近段階の間、無人飛行物体を誘導するシステム
本発明は、無人飛行物体を着陸させるために、プラットフォーム、特に海軍プラットフォーム(1)への接近段階の間、無人飛行物体を誘導するシステムにおいて、前記プラットフォームは、水平面からの所定の角度区域にわたって光誘導ビームの配列(2)を放射する滑空角指示装置を備えるとともに、前記無人飛行物体に前記誘導ビームを追従させるために、前記無人飛行物体は、画像解析手段(7)と、前記無人飛行物体の自動操縦手段(9)に指令するための命令の演算手段(8)とに接続されたビーム捕捉カメラ(6)を備えることを特徴とする。  (もっと読む)
(もっと読む)
第1の農業機械と並行して田畑一面を走行するように操縦することができる第2の農業機械を操縦するための方法および装置
本発明は、第1の農業機械(10)に対して相対的に、田畑(34)一面で操縦することができる第2の農業機械(12)を操縦するための方法および装置に関し、
距離計(60)であって、農業機械(12)の1つの上に搭載され、水平領域にわたる隣接した対象物の方向および距離に関する測定値を記録するように動作することができる、距離計(60)と、
評価手段(68)であって、距離計(60)に接続され、操縦信号を出力するように設計され、その操縦信号は、距離計(60)の測定値に基づき、第1の機械(10)に対して相対的に第2の機械(12)を誘導する、評価手段(68)とを備える。
評価手段(68)は、距離計(60)によって時間的に連続して記録された、複数の測定値を参照して、記録された測定値から、距離計(60)を備えていない機械(10)に割り当てることができる測定値を選択し、そして選択された測定値を使用して、操縦信号を生成するように、動作することができることが提案されている。 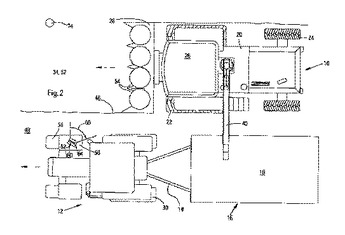 (もっと読む)
(もっと読む)
水中航走体の発射回収システムおよびこの発射回収システムを備える船舶
【課題】小型船舶で安全に水中航走体の発射回収を行うことを目的とする。
【解決手段】水中を航走可能な水中航走体5と、水中航走体5を水中で発射または収容する発射回収カゴ3と、発射回収カゴ3に配置され、水中航走体5を誘導する誘導信号を発するピンガP1、P2,P3,P4とを備え、水中航走体5には、ピンガP1、P2,P3,P4から発せられた誘導信号を受信するハイドロフォン23と、ハイドロフォン23からの信号に基づいて発射回収カゴ3の位置および姿勢を計測する位置姿勢計測部と、位置姿勢計測部により計測された発射回収カゴ3の姿勢に合わせて水中航走体5の姿勢を制御する姿勢制御部とが設けられている水中航走体の発射回収システム10を提供する。
(もっと読む)
自律移動装置
【課題】特定の人が他の人とグループを構成する状況を考慮した自律移動装置を提供する。
【解決手段】自律移動装置1は、特定の人の近くにいる他の人が特定の人と共に移動するグループに属しているか否かを判定するグループ判定手段23と、自律移動装置が特定の人を追従するエリアである自装置追従エリアの情報を取得する自装置追従エリア取得手段21aと、他の人に追従する他の自律移動装置が他の人を追従するエリアである他装置追従エリアの情報を取得する他装置追従エリア取得手段22aと、グループ判定手段により他の人がグループに属していると判定され、且つ、自装置追従エリアの一部が他装置追従エリアと重複する場合に、他装置追従エリアと重複しない位置において自律移動装置を特定の人に追従させる追従制御手段24,26と、を備える。
(もっと読む)
1 - 10 / 22
[ Back to top ]