
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
291 - 300 / 7,349
除雪支援システム及び除雪車
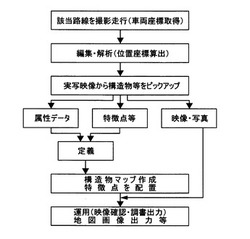
【課題】 無積雪時の実写映像に基づき障害物等の構造物と除雪車との位置関係を目視上及び座標計算上で正確に把握することによって、容易に且つ安全に除雪作業を行うことができる除雪支援システムの提供。
【解決手段】 無積雪時に撮像手段1aで同時取得した全方位の実写映像を、映像取得時の車両Aの絶対座標系における車両座標及び移動方向等と結び付けて記録する映像記録手段1と、車両座標、並びに所望の視線から導かれる移動方向等に対応する実写映像を前記映像記録手段1から読み出し表示フレームFに出力する映像出力手段4と、映像記録手段1から読み出した実写映像に含まれる特徴点の絶対座標を当該映像記録手段1から読み出し絶対座標系の三次元モデルを作成する構造物記録手段5を備える除雪支援システム。
(もっと読む)
画像処理装置

【課題】撮像装置からの画像情報のみであっても、微小な画像の変化から精度良くパラメータを求め、高精度な先行車の追従制御を実現できる画像処理装置を提供する。
【解決手段】前方走行中の移動体に対して自車両の走行制御量に基づいて追従制御を行う画像処理装置において、入力された撮像画像から移動体の領域を特定し、追従制御開始後、特定された移動体の領域を基準画像領域と設定し、所定の時間経過後の移動体の領域を比較画像領域と設定する画像処理部と、設定された基準画像領域と比較画像領域とを照合し、移動体との走行情報を算出する照合部と、照合部で算出された走行情報から自車両の走行制御量を算出する制御量算出部と、を有する。
(もっと読む)
運転状態診断装置
【課題】運転者の運転状態の診断の精度向上を図ることが可能な運転状態診断装置を提供する。
【解決手段】車輌100を運転する運転者の運転状態を診断する運転状態診断装置1は、車輌100の前後方向に沿った運転操作又は車輌状態を検出して縦方向信号を生成する縦方向信号生成装置10と、車輌100の幅方向に沿った運転操作又は車輌状態を検出して横方向信号を生成する横方向信号生成装置20と、縦方向信号と横方向信号とに基づいて運転者の運転状態を判定する運転状態判定装置30と、を備えており、運転状態は、「スポーティ運転」と、「急ぎ/イライラ運転」と、を少なくとも含んでいる。
(もっと読む)
周辺車両情報通知装置
【課題】危険車両を的確に検知して、自車両の運転者に危険回避を確実に促すことができる周辺車両情報通知装置を提供する。
【解決手段】他車両情報取得手段301は、自車両110の周辺を走行する他車両120の挙動に関する情報(他車両情報)を、他車両120からの通信によって取得する。道路情報取得手段302は、他車両120が走行する道路に関する道路環境情報を取得する。危険車両判断手段303は、たとえば、他車両120の走行速度とその地点の制限速度を比較して、制限速度を大幅に超過している場合に、他車両120が危険走行をおこなっている(危険車両である)と判断する。通知手段304は、危険車両判断手段303によって他車両120が危険走行をおこなっていると判断された場合、当該判断結果を通知する。
(もっと読む)
車両用運転支援装置および車両用運転支援方法
【課題】運転者の納得性の高い情報提供を行うことができる車両用運転支援装置を提供する。
【解決手段】車両用運転支援装置は、現在の走行状態と運転操作を示す短時間のデータと、その日の走行状態と運転操作を示す中時間のデータをそれぞれ取得する。そして、短時間のデータの分布と中時間のデータの分布とを比較することにより運転診断を行い、運転診断結果を2つの評価基準に従って評価して警報または運転改善示唆を行う。
(もっと読む)
通信装置及び通信方法
【課題】通信トラフィックの増加を抑制しつつ、実際の車両の挙動に合致した内容を他の装置に認識させること。
【解決手段】通信装置30の自車情報送信部35は、現時刻t0から規定時間Tpまでの自車の状態(即ち、自車情報)を推定する自車情報推定部37と、過去に送信した自車情報(以下、「過去自車情報」と称す)を格納する自車情報記憶部38と、自車情報記憶部38に格納された過去自車情報及び自車情報推定部37で推定された自車情報(以下、「現自車情報」と称す)とに基づいて、現自車情報の送信の可否を判定する自車情報送信判定部39と、自車情報送信判定部39にて送信可能と判定された現自車情報を送信する送信部40とを備えている。自車情報送信判定部39は、現自車情報と過去自車情報との一致度合いを表す情報一致度が規定閾値Th未満であれば、当該現自車情報を送信可能と判定する。
(もっと読む)
接続機器一覧の表示制御装置および表示制御方法
【課題】検索結果の一覧表示の中に同機種の認証済み機器が複数含まれる場合であっても、当該同機種の認証済み機器を互いに区別して認識できるようにした「接続機器一覧の表示制御装置および表示制御方法」を提供する。
【解決手段】ブルートゥース認証時に、車載機10が携帯電話機100a,100b,100cから待ち受け画面の画像を取得してアイコンを生成し、生成したアイコンを登録情報記憶部2に保存しておく。その後、車載機10がブルートゥース接続可能な携帯電話機100a,100b,100cをサーチしたときに、登録情報記憶部2に保存しておいたアイコンを用いて検索結果を一覧表示することにより、サーチにより検索された一覧の中に同機種の携帯電話機が複数含まれている場合であっても、それぞれの携帯電話機に固有の画像から生成されたアイコンによって視覚的に区別して認識できるようにする。
(もっと読む)
撮像装置及びこれを備えた物体検出装置、並びに、光学フィルタ及びその製造方法
【課題】光量が大きく異なっている複数の光源体をより短い時間間隔で連続して検出することを課題とする。
【解決手段】撮像領域内に存在する物体からの光を、光学フィルタを介して、受光素子(撮像画素a,b,c,・・・)が2次元配置された画素アレイで構成された画像センサにより受光することで、撮像領域内を撮像する撮像装置において、上記光学フィルタは、透過率が低い光透過領域(撮像画素b,d,e,gに対応したフィルタ領域)と透過率が高い光透過領域(撮像画素a,c,f,hに対応したフィルタ領域)が、撮像画素単位で、上記画素アレイの2次元方向へ交互に配置されている透過率調整層を有する。
(もっと読む)
通信装置及び通信方法
【課題】所要の通信可能領域を確保することができる通信装置及び通信方法を提供する。
【解決手段】無線通信部102は、路路間通信対象の路側通信装置(例えば、隣接する路側通信装置)との間の路路間通信、及び車載機2との間の路車間通信を行う。感知レベル制御部104は、制御部101の制御のもと、無線通信部102で受信した無線信号の感知レベルの高低を制御する。通信領域判定部105は、感知レベル制御部104で感知レベルの高低を制御した前後で、車載機2から受信した無線信号に含まれる情報に基づいて車両とのアップリンクエリアの広狭を判定する。感知レベル制御部104は、通信領域判定部105で判定したアップリンクエリアの広狭に応じて感知レベルをさらに制御する。
(もっと読む)
走行制御装置
【課題】車両の待ち時間を発生し難くすることが可能な走行制御装置を提供する。
【解決手段】走行制御装置2は、自車両2の位置及び速度を検出すると共に、他車両4の位置及び速度を検出する位置・速度検出部381と、自車両2と他車両4が相互に接近する接近位置Aを推定する接近位置推定部382と、自車両及び他車両が同一時点で同一車線上を走行する場合に、接近位置Aを、待ち時間発生エリアCの外の変更接近位置Bに変更する接近位置変更部383と、自車両2及び他車両4のいずれもが変更接近位置Bに接近しつつ、自車両2又は他車両4の一方が、待ち時間発生エリアCを通過した後に、自車両2又は他車両4の他方が待ち時間発生エリアCに進入する走行計画を作成する走行計画作成部384と、走行計画を他車両4へ送信する通信ユニット35と、走行計画に従って、自車両2の走行を実行する走行駆動装置36と、を備えている。
(もっと読む)
291 - 300 / 7,349
[ Back to top ]