
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
6,241 - 6,250 / 7,349
自動車の追従走行装置
【課題】
自動車の追従走行装置において、自車両のギクシャク運転を抑制し、乗員の乗り心地や安心感の向上を図ることを課題とする。
【解決手段】
追従走行装置1は、車間距離検出手段11で検出された前方車両Wfと自車両Wとの車間距離L1が目標車間距離Ltに維持されるように自車両Wの車速vを制御する車速制御手段17,18を備えている。追従走行装置1は、前々方車両Wffと前方車両Wfとの車間距離L2が所定の車間距離Lmよりも短くなったときは短くなっていないときよりも車速制御手段17,18の制御感度を鈍化させるコントロールユニット10を備えている。
(もっと読む)
車両用警報装置

【課題】 警報出力時に生じる運転者の混乱を防止するとともに、不必要な警報出力に伴う煩わしさをなくすことができる「車両用警報装置」を提供すること。
【解決手段】 車両用警報装置は、車両周辺の物体を検出するレーダ処理モジュール10、カメラ20、位置算出部12、22と、検出された物体について警報出力の要否を判定する警報判定部40と、これら複数の警報出力の優先順位を判定する優先順位判定部60と、優先順位判定部60の判定結果に基づいて警報出力を行う警報出力処理部70、表示装置72、スピーカ74とを備える。
(もっと読む)
運転支援装置
【課題】実質的に全ての車種について共通の構成で対応可能であるとともに、ガイド線画像を画面表示する場合よりも演算処理の負荷を軽減し得る運転支援装置を得る。
【解決手段】マスク画像には、帯画像30と、帯画像30の両端部に繋がる、ほぼ半楕円の枠状の枠画像15と、枠画像15上の所定の箇所から上方に向かって伸びるポール画像16a,16bとが含まれている。操舵角が変わってもマスク画像は変化しない。枠画像15上には、車両の予測進行方向を標示する進行方向標示17と、予測進行方向に対して左右に90度ずれた方向を標示する直角方向標示18a,18bとが表示されている。進行方向標示17及び直角方向標示18a,18bは、操舵角に応じて、枠画像15に沿って移動する。
(もっと読む)
追従制御装置
【課題】 運転者負荷に応じて自車両の状態を自動的に設定することができる追従制御装置を提供すること。
【解決手段】 自車両に搭載され、先行車両の走行状態に応じて自車両の状態を設定するACC設定制御部10を備える追従制御装置1において、当該ACC設定制御部10に、運転者負荷に基づいて自車両の状態を設定する機能を備えさせた。
(もっと読む)
道路形状認識装置
【課題】 デリニエータが路側帯に存在しているか否かに拘わらず、現在の走行位置における道路曲率と前方の道路曲率とが異なっていたり、操舵にふらつきがあったりしても、正確に道路形状を認識することができるようにする。
【解決手段】 物体のドップラー速度と自車両の速度を比較して、当該物体が静止物体であるか否かを識別する静止物抽出部32と、その静止物抽出部32により静止物体であると識別されている物体の中から道路形状の推定に適している有効な静止物体を抽出する有効静止物抽出部36とを設け、その有効静止物抽出部36により抽出された物体の位置を道路形状推定式に当て嵌めて道路形状を推定する。
(もっと読む)
自動車用障害物検知装置
【課題】 後方から接近する障害物を感知し、運転者等に注意を促すことができる自動車用障害物検知装置を提供する。
【解決手段】 サイドミラー指向性マイク14から自動車後方の音声を集音する。また、ドア開閉度検知部18でドアを開けたことを検知した場合は、ドアマイクアレイ11から自動車後方の音声を集音する。収音した音声は音声解析部19に入力する。音声解析部19で、自動車後方から障害物が接近していると判定された場合、音声再生部20はスピーカ21から警告音を発するようにする。これにより、後方から接近する障害物を感知し、運転者等に注意を促すことができる。
(もっと読む)
運転支援装置
【課題】 運転者が周囲の車両から報知される情報を認識する必要なく車両を安全に運転できるようにする。
【解決手段】 前方カメラや後方カメラにより自車両の周辺の周辺車両を連続的に撮影し(S1)、この連続的な撮影画像から周辺車両に貼付された紅葉マークの挙動を観察し(S6)、この紅葉マークの挙動が撮像範囲内の所定領域から所定回数以上逸脱したことを条件として周辺車両C2もしくはC3が要注意車両であると判定しスピーカ13から自車両Cの車室内に音声案内する(S9、S11)。
(もっと読む)
自動車の追従走行装置
【課題】
自動車の追従走行装置において、自車両のギクシャク運転を抑制し、乗員の乗り心地や安心感の向上を図ることを課題とする。
【解決手段】
追従走行装置1は、車間距離検出手段11で検出された前方車両Wfと自車両Wとの車間距離L1が目標車間距離Ltに維持されるように自車両Wの車速vを制御する車速制御手段17,18を備えている。追従走行装置1は、前々方車両Wffと前方車両Wfとの車間距離L3が所定の車間距離Lmよりも短くなったときは前々方車両Wffと自車両Wとの車間距離L2が第2の目標車間距離設定手段10で設定された目標車間距離Ltに維持されるように自車両Wの車速vを制御するコントロールユニット10を備えている。
(もっと読む)
車外音処理装置
【課題】さまざまな走行状態において、音響を発して接近する物体の検出が可能な車外音処理装置を提供する。
【解決手段】車外の音を収集するためのマイクロフォン1と、車両の状態を検出する車両状態検出部4と、マイクロフォン1で収集された音響信号を、収集されたときの車両状態に対応づけて蓄積する記憶部13と、車両の状態ごとに音響信号を所定の期間にわたって平均化した情報を車両の状態に対応づけて記憶する車両音−車両状態対比記憶部15と、車両走行時にマイクロフォン1で収集される音響信号と、音響信号が収集されたときの車両状態に対応する平均化された情報を比較する車両音比較部16と、車両走行時の音響信号とそのときの車両状態に対応する平均化された情報を比較した結果、車両走行時の音響信号が平均化された車両音より大きく、かつ逐次大きくなる場合に、車両に接近する物体があると判断する接近判定部17と、を備える。
(もっと読む)
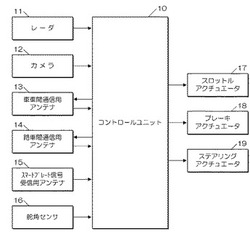
運転支援装置
【課題】GPSにおけるデータ更新周期の影響を受けることなく、他車両の接近の注意喚起を行うことができる。
【解決手段】運転支援装置は、交差点における自車両周囲の走行環境を検出し(ステップS2)、その自車両周囲の走行環境と自車両位置とから、車車間通信機の通信可能範囲を算出し(ステップS3)、車車間通信機が受信した他車両の位置を、前記通信可能範囲に基づいて補正し(ステップS5)、その補正した他車両の位置に基づいて、交差点における他車両の接近警報を行う(ステップS6)。
(もっと読む)
6,241 - 6,250 / 7,349
[ Back to top ]