
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
7,181 - 7,190 / 7,349
他車両検出装置及び車間距離制御装置
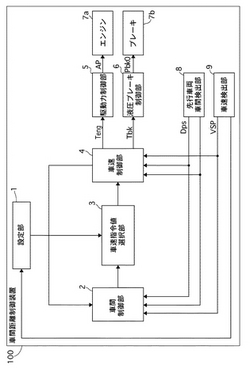
【課題】先行車両の車両の種類、及びその車両数を判断可能な装置、および先行車両の車種に応じて車間距離の制御を変更可能な装置を提供すること。
【解決手段】先行車両車間検出部8において、反射波が持つ強度パターンに基づき他車両が四輪車であるか二輪車であるかの車両種類を判定する手段を備え、また車間距離制御装置100において、先行車両車間検出部8にて検出した他車両の種類に応じて自車両の先行車両追従モード又は警報を発する車間距離を変更するようにした。
(もっと読む)
車載制御装置

【課題】 自車両と後方から接近する車両の走行状況を把握して、その状況に応じて適切な回避策をとることが可能な車載制御装置を提供する。
【解決手段】 車両の速度を検出する車速検出手段と、両の後方を走行する車両を検出する後方車両検出手段と、後方車両との車間距離を演算する車間距離演算手段と、車速および車間距離とに基づいて後方車両の接近速度を演算する接近速度演算手段と、車両の現在位置を検出する位置検出手段と、後方車両に報知を行なう報知手段と、道路種別の情報を含む地図データを記憶する地図データ記憶手段と、道路種別に基づいて定められる速度および接近速度の基準値を記憶する基準値記憶手段と、速度および接近速度が車両の現在位置の道路種別毎に定められる基準値内にあるかどうかを判定する判定手段と、速度および接近速度が基準値を超えたと判定された場合に、報知手段に報知を行なわせる報知制御手段とを有することを特徴とする車載制御装置として提供可能である。
(もっと読む)
車両の認知支援装置
【課題】 自車両に対し相対的に危険度の高い物体の存在を運転者に適切に認識させる。
【解決手段】 対象物画像切出部23は、対象物抽出部21にて抽出された対象物の画像を外界センサ12から入力される画像データから切り出して切出画像を生成する。切出画像表示制御部32は、対象物方向算出部29にて算出された対象物の存在方向の情報と、方向センサ18から出力される運転者の頭部の向きに係る検出信号とに基づき、運転者から見た対象物の存在方向を算出する。切出画像表示制御部32は、少なくとも、視認難易度判定部25にて算出した視認性の難度が所定難度を超えていると判定された場合、または、危険度判定部28にて算出した危険度が所定危険度を超えていると判定された場合には、対象物画像切出部23にて生成された切出画像と、運転者から見た対象物の存在方向の情報とを、副表示装置17へ出力する。
(もっと読む)
接近警報制御方法及び接近警報装置
【目的】 前方車両への接近注意の度合が大きいほど後方車両における接近注意の警告タイミングを早め、あるいは警告頻度を多くする「接近警報制御方法及び接近警報装置」を提供することである。
【構成】 前方車両1に対する接近注意を後方車両2において行なう接近警報制御において、前方車両1において、ユーザ設定情報あるいは車両情報に基づいて接近注意の度合を決定し、車車間通信により決定した接近注意の度合を後方車両2に送信し、後方車両において、前方車両から受信した度合に応じた条件で接近注意の警報を行なう。
(もっと読む)
車線認識画像処理装置
【課題】1次元画像フィルタの基本原理を変えることなく、条件付加により誤検出を防いでレーンマーキング認識性能を向上させた車線認識画像処理装置を得る。
【解決手段】撮影画像に対してレーンマーキングの探索範囲をウィンドウWにより設定するウィンドウ設定手段103と、探索範囲からレーンマーキングの候補点P1、P2を抽出する候補点抽出手段104と、候補点の集合を数学的モデル式で近似して、レーンマーキング数学的モデル式を導出する車線認識手段105と、を備えている。候補点抽出手段104は、カーネルサイズ設定手段141aと、注目画素の濃淡値と走査方向の前後にカーネルサイズだけ離れた画素の濃淡値との差分{g(h)−g(h−Δh)}、{g(h)−g(h+Δh)}のうち、小さい方をフィルタ処理結果Eとする1次元画像フィルタ処理手段141と、フィルタ処理結果Eを2値化する2値化手段142とを含む。
(もっと読む)
物体警告装置及び物体警告方法
【課題】 警告を発することが必要な場合にのみ警告を発することにより、運転者に対する注意喚起効果の低下を抑制することができる物体警告装置及び物体警告方法を提供する。
【解決手段】 物体警告装置1は、車両前方の画像を撮像する歩行者検出用カメラ10と、歩行者検出用カメラ10により撮像された画像に基づいて歩行者の位置を検出する歩行者検出部12、歩行者位置取得部13と、車両を運転する運転者の視線方向を検出する視線方向取得用カメラ20、視線検出部22と、歩行者の位置と運転者の視線方向とに基づいて運転者が歩行者を認識しているか否かを判断する認識判断部23と、運転者が認識していない歩行者が所定の警告範囲内に進入した場合に、運転者に警告を促す警告範囲進入判断部41、警告出力部42とを備える。
(もっと読む)
移動障害物検出装置
【課題】ノイズの影響を受けず且つ高精度に移動障害物の存在を検出することのできる移動障害物検出装置を提供する。
【解決手段】自車両前方の映像を撮像するカメラ1と、カメラ1で撮像された画像上に存在するエッジ部分のオプティカルフローを求めるオプティカルフロー算出手段2と、オプティカルフロー算出手段2で求められたオプティカルフローの交点を求めるオプティカルフロー交点算出手段3と、オプティカルフロー交点算出手段3にて求められた、オプティカルフローの交点の分布をヒストグラム化するヒストグラム作成手段4と、ヒストグラム作成手段4で作成されたヒストグラムに基づき、オプティカルフローの交点のピーク位置が存在する場合に、このピーク位置が同一物体によるものか、或いは異なる物体によるものかをt検定を用いて検定するピーク検定手段5とを備える。
(もっと読む)
車両用後退ガイド表示装置
【課題】エンジン始動直後であってもすぐに車両をバックさせるために後方を確認できる車両用後退ガイド表示装置を提供する。
【解決手段】車両の後方周辺を撮影するための後方撮影手段と、後方撮影映像とその後方撮影映像とは異なる他の映像または情報とを表示する表示部と、車両のイグニッション信号を監視するイグニッション信号監視手段と、車両のシフトレバーのレンジ位置を監視するシフトレバー監視手段と、これらを制御するガイド制御手段とを有する車両用後退ガイド表示装置である。電源が投入されて通常の使用状態になるまでに表示されるオープニング画が表示されている場合に、シフトレバーが後退とされると、ガイド制御手段によって、これらの表示を中断して後方映像を表示する。このため運転者は、車両のエンジンをかけてすぐに表示部で後方撮影映像を確認できる。
(もっと読む)
運転推定装置および方法
【課題】車両の運転滑らかさ度や、自車の前車による影響度を判断する。
【解決手段】運転時の自車と前車との車間距離を取得する車間距離取得手段101と、自車の速度を取得する自車速度取得手段102と、車間距離と自車の速度に基づいて前車の速度の時間に関する2階微分値を算出し、自車の速度に基づいて自車の速度の時間に関する2階微分値を算出する車両情報算出手段104と、前車の速度の時間に関する2階微分値に基づいて、前車の運転滑らかさ度を推定する前車の運転滑らかさ度推定手段105と、自車の速度の時間に関する2階微分値に基づいて、自車の運転滑らかさ度を推定する自車の運転滑らかさ度推定手段106と、前車の運転滑らかさ度と自車の運転滑らかさ度とを時系列で比較して、自車の前車による影響度を推定する前車と自車比較推定手段107と、情報を提示する表示手段108とを有する。
(もっと読む)
障害物検知装置
【課題】 異常発生を誤って報知する回数を少なくするとともに、速やかに異常発生を報知することができる。
【解決手段】 S200、及びS300における異常判定時間(A、B)は、各々時間長さが異なるように設定される。すなわち、センサ11〜16と最初に(初回に)通信を行う場合の異常判定時間(A)は、初回に通信を行って正常に通信が行われた後に通信を行う場合の異常判定時間(B)よりも短い時間(A<B)となるように設定される。
(もっと読む)
7,181 - 7,190 / 7,349
[ Back to top ]