
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
7,171 - 7,180 / 7,349
他車両検出装置及び車間距離制御装置
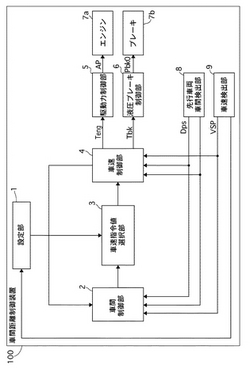
【課題】先行車両の車両の種類、及びその車両数を判断可能な装置、および先行車両の車種に応じて車間距離の制御を変更可能な装置を提供すること。
【解決手段】先行車両車間検出部8において、反射波が持つ強度パターンに基づき他車両が四輪車であるか二輪車であるかの車両種類を判定する手段を備え、また車間距離制御装置100において、先行車両車間検出部8にて検出した他車両の種類に応じて自車両の先行車両追従モード又は警報を発する車間距離を変更するようにした。
(もっと読む)
車両用表示装置

【課題】 運転者が車両の前方側の走路形状を容易に把握できる車両用表示装置を提供する。
【解決手段】 記憶媒体13に格納された三次元の座標情報からなるデジタルマップデータに基づいて走路形状を表示する表示器2と、車両Aの現在位置を検出する位置検出手段17と、位置検出手段17により検出された車両Aの現在位置に基づいて前記デジタルマップデータを読み出して車両Aの前方側の走路形状を表示器2に表示させる制御手段15と、を備える車両用ヘッドアップディスプレイ装置であって、制御手段15は、表示器2に表示させる前記走路形状において、所定の曲率以上のカーブ部分L4を強調して表示させる。
(もっと読む)
車載制御装置
【課題】 自車両と後方から接近する車両の走行状況を把握して、その状況に応じて適切な回避策をとることが可能な車載制御装置を提供する。
【解決手段】 車両の速度を検出する車速検出手段と、両の後方を走行する車両を検出する後方車両検出手段と、後方車両との車間距離を演算する車間距離演算手段と、車速および車間距離とに基づいて後方車両の接近速度を演算する接近速度演算手段と、車両の現在位置を検出する位置検出手段と、後方車両に報知を行なう報知手段と、道路種別の情報を含む地図データを記憶する地図データ記憶手段と、道路種別に基づいて定められる速度および接近速度の基準値を記憶する基準値記憶手段と、速度および接近速度が車両の現在位置の道路種別毎に定められる基準値内にあるかどうかを判定する判定手段と、速度および接近速度が基準値を超えたと判定された場合に、報知手段に報知を行なわせる報知制御手段とを有することを特徴とする車載制御装置として提供可能である。
(もっと読む)
酒気帯びドライバー支援提供自動システム
ユーザーから提供されたサンプルに基づいてユーザーの酒気帯びの数値を生成する薬物検出器と、送迎サービスと通信する通知手段とを備え、通知手段は酒気帯びの数値が所定の範囲外のときに送迎サービスに連絡するドライバー支援提供システムである。通知手段はまた、送迎サービスがユーザーの所在を確認できるように、送迎サービスに連絡をするときに送迎サービスにナビゲーションデータを提供する。さらに、ユーザーから提供されたサンプルに基づいてユーザーの酒気帯びの数値を生成するステップと、酒気帯びの数値が所定の範囲外のときに送迎サービスに連絡するステップと、送迎サービスが前記ユーザーの所在を確認できるように連絡するステップの間に送迎サービスにナビゲーションデータを提供するステップを備えている酒気帯びドライバー支援提供方法である。 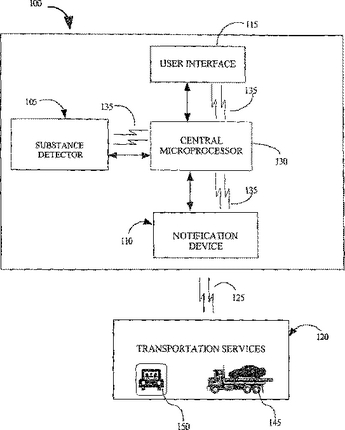 (もっと読む)
(もっと読む)
車両の認知支援装置
【課題】 自車両に対し相対的に危険度の高い物体の存在を運転者に適切に認識させる。
【解決手段】 対象物画像切出部23は、対象物抽出部21にて抽出された対象物の画像を外界センサ12から入力される画像データから切り出して切出画像を生成する。切出画像表示制御部32は、対象物方向算出部29にて算出された対象物の存在方向の情報と、方向センサ18から出力される運転者の頭部の向きに係る検出信号とに基づき、運転者から見た対象物の存在方向を算出する。切出画像表示制御部32は、少なくとも、視認難易度判定部25にて算出した視認性の難度が所定難度を超えていると判定された場合、または、危険度判定部28にて算出した危険度が所定危険度を超えていると判定された場合には、対象物画像切出部23にて生成された切出画像と、運転者から見た対象物の存在方向の情報とを、副表示装置17へ出力する。
(もっと読む)
接近警報制御方法及び接近警報装置
【目的】 前方車両への接近注意の度合が大きいほど後方車両における接近注意の警告タイミングを早め、あるいは警告頻度を多くする「接近警報制御方法及び接近警報装置」を提供することである。
【構成】 前方車両1に対する接近注意を後方車両2において行なう接近警報制御において、前方車両1において、ユーザ設定情報あるいは車両情報に基づいて接近注意の度合を決定し、車車間通信により決定した接近注意の度合を後方車両2に送信し、後方車両において、前方車両から受信した度合に応じた条件で接近注意の警報を行なう。
(もっと読む)
危険領域設定装置
【課題】 自車両と衝突する可能性がある物体の検出漏れを低減する危険領域設定装置を提供すること。
【解決手段】 物体の位置を検出する物体位置検出手段と、物体位置検出手段において物体の位置が検出された場合において、物体の位置を基準とした所定の領域を常時定める物体領域設定手段と、自車両についての危険領域を設定する対象範囲を常時定める対象範囲設定手段と、対象範囲と物体領域との重複部分を検出する重複部分検出手段と、重複部分検出手段において重複部分が検出された場合に、重複部分に基づき危険領域を常時設定する危険領域設定手段とを有する。
(もっと読む)
車両検知警報装置及び車両検知警報方法
【課題】簡便な構成の装置で車両の検知を迅速に行う。
【解決手段】車両検知警報装置は、車両12が通過する路面14を含む背景を格子状の画素単位で撮像するCMOSカメラ16と、得られた撮像画像70に基づいて車両12の検知を行うコントローラ18とを有する。コントローラ18は、撮像画像70における路面14の像上の複数の略水平な検知ラインL1、L2及びL3を特定し、撮像画像70における各検知ラインL1、L2及びL3上の画素毎の輝度を基準輝度として記憶し、各検知ラインL1、L2及びL3上の画素の輝度をCMOSカメラ16から1画素毎に順次読み込み検査輝度として記憶する。次に、検査輝度と同一画素の基準輝度との差の絶対値を順次求め、検知ライン毎に絶対値の総和を求め、この総和値に基づいて車両12が走行していること及びその走行方向を検知する。
(もっと読む)
運転支援装置
【課題】道路情報に基づいて、新しい道路環境に適応するように自車両を走行させ、安全性を向上させること。
【解決手段】車輪の回転速度に対応した信号を検出する車速センサ10、ナビゲーション装置20、及びスロットルバルブの開度を調節するスロットル駆動器40が設けられている。事前登録地点(例えば、制限速度が変更される地点)に自車両が接近した場合、事前登録地点を起点とする道路の制限速度を取得し、自動的に、スロットル駆動器40を用いて、自車両の駆動力を制御することによって、自車両の車速を制限速度まで変更させるようにした。
(もっと読む)
車両周囲物体検出装置
【課題】グルーピングされた検出点のいずれかの相対位置に誤差が含まれている場合であっても、物体の相対位置を求めるときにその誤差の影響を取り除くことができる車両周囲の物体を検出する装置を提供する。
【解決手段】自車両前方の物体について、各検出点において位置座標を検出し(ステップS1)、所定の条件を満たす検出点同士をまとめて物体ごとに検出点のグループを作成し、グルーピングを行う(ステップS6、S10)。このグルーピングされた検出点のそれぞれについて、信頼性判断値R1(t)またはR2(t)を算出し(ステップS7、S11)、その値に基づいて、同一グループにグルーピングされた検出点から代表検出点を選択する(ステップS8、S12)。選択された代表検出点の相対位置に基づいて、物体の相対位置を決定する(ステップS9、S13)。
(もっと読む)
7,171 - 7,180 / 7,349
[ Back to top ]