
国際特許分類[H02P25/06]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 交流電動機の種別または構造的な細部に特徴を有する交流電動機の制御装置または制御方法 (661) | 電動機の種類に特徴のあるもの (646) | リニアモータ (350)
国際特許分類[H02P25/06]に分類される特許
71 - 80 / 350
モータ駆動装置
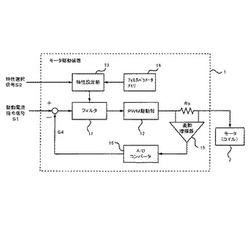
【課題】コストの低減を図りつつ、コイル間の特性のバラツキに起因する特性の劣化を抑制する。
【解決手段】入力される駆動指令信号S1及び設定された駆動特性値に基づいて駆動信号を出力するフィルタ11と、フィルタ11からの駆動信号に応じてコイル2に供給する電流を出力するPWM駆動部12と、複数のコイル2の特性毎に予め求められたパラメータが記憶されたメモリ14と、入力される特性選択信号S2に対応するパラメータに基づいて、フィルタ11が用いる駆動特性値を変更して設定する特性設定部13とを備えている。
(もっと読む)
モータ駆動装置

【課題】定常偏差を小さくしつつ、目標追従性を向上する。
【解決手段】入力される駆動信号に応じてモータ2に電流を供給するモータ駆動回路3と、モータ駆動回路3によりモータ2に供給される電流を検出して実電流信号S2として出力する電流検出回路R10,4と、指令値信号S1と実電流信号S2とに基づき駆動信号S3をモータ駆動回路3に対して出力する比例積分回路5と、指令値信号S1と実電流信号S2との偏差が予め設定された所定値より大きい場合に比例積分回路5の時定数を第1の値とし、該所定値以下となった場合に該時定数を該第1の値よりも長い第2の値に変更する時定数変更回路SW,C3,6とを備えている。
(もっと読む)
モータ駆動回路
【課題】電流指令値通りの電流をモータのコイルに流すことができるモータ駆動回路を提供すること。
【解決手段】モータに流れる駆動電流を検出する第1の電流検出器と、この第1の電流検出器の不使用時に、前記モータに流れる前記駆動電流を検出する第2の電流検出器と、前記第1の電流検出器又は前記第2の電流検出器によって検出された値に基づいて前記駆動電流を電流指令値に制御する定電流駆動回路と、前記第1の電流検出器と前記第2の電流検出器を一定間隔で切り替える切り替え器と、を備える。
(もっと読む)
リニアモータおよびリニアモータ装置
【課題】低価格で簡単な構成で位置検出可能なリニアモータを提供する。
【解決手段】リニアモータ1Aは、固定子3と、固定子3に対して移動可能に配設されている可動子2と、1対のホール素子17A、17B、1対の第3、第4のホール素子19A、19Bとを有する。ホール素子17A、17Bは、可動子2に配設される隣接する1対の磁極の幅Paの(1/4)の距離を隔ててリニアモータの長手方向に配設され、かつ、磁極の磁界に感応する距離を隔ててリニアモータの長手方向と直交する方向に配設され、90°の移動範囲の可動子の位置を検出することが可能である。第3、第4のホール素子19A、19Bは、可動子の絶対位置を検出するために使用する。
(もっと読む)
リニアモータ及びリニアモータユニット
【課題】ロッドが熱変形により伸縮しても、該ロッドの位置精度を充分に確保できるリニアモータを提供する。
【解決手段】マグネットを有し延在するロッド1と、前記ロッド1を囲むコイル4と、前記コイル4を支持するハウジング2と、を備え、前記マグネットの磁界と前記コイル4に流れる電流とによって、前記ロッド1と前記ハウジング2とを相対移動させるリニアモータ11であって、前記ロッド1には、一端に外部機器取付部105が設けられ、前記ハウジング2の前記外部機器取付部105側には、該ハウジング2に対する前記ロッド1の位置を検出する位置検出手段9が配設されていることを特徴とする。
(もっと読む)
多自由度アクチュエータ
【課題】本発明は、小型でありながら推力、浮上力、可変浮上力が大きく、Z方向の浮上とXY方向の推進、さらにθX、θY、θZ方向の微動を行う多自由度アクチュエータを提供する。
【解決手段】永久磁石114は極数P(Pは2以上の偶数)極性を逆にX方向に配置し、Z方向駆動用コイル104は永久磁石114の磁極と対向する位置にP個、永久磁石114とZ方向駆動用コイル104はY方向にn列(nは2以上の整数)配置し、X方向駆動用コイル105のコイル辺がZ方向駆動用コイル104の中心と一致する位置にX方向駆動用コイル105をP/2個配置し、Z方向駆動用コイル104のコイルエンドを折り曲げ、空心にX方向駆動用コイル105のコイル辺を埋め込むように配置する。
(もっと読む)
渦電流ブレーキの制御装置
【課題】 初期励磁に小容量の補助回路電源を用い、その後の励磁に必要な電力を発電制動時の運動エネルギから得る発電電力制御と、ブレーキの制動力制御が可能な渦電流ブレーキの制御装置を提供する。
【解決手段】 鉄道車両のレールに対向する位置に設けられたリニア誘導モータの電機子11、12を交流励磁してブレーキ力を発生させる渦電流ブレーキの制御装置において、初期励磁手段は、補助電源回路の低圧電源で初期励磁し、電力制御手段は、渦電流ブレーキの発電電力が交流励磁の周波数と一次電流大きさに対して一義的に決まる特性を利用して渦電流ブレーキの動作に必要な発電電力を過不足なく得るための制御を行い、制動力制御手段は、ブレーキ力が周波数によらずほぼ一定で、一次電流大きさに対して一義的に決まる特性を利用し、必要なブレーキ力を得られるよう出力電圧を制御する。
(もっと読む)
同期モータを作動させる方法および増幅器
本発明は、同期モータ(100、300)を作動させる方法に関する。本方法では、ステップa)において、第1のモータ部材(110、310)によって磁場(111、311)を所定の向きに生成して、第1のモータ部材と第2のモータ部材(110、120、310、320)との間で所定値(151)に限定された相対運動を発生させ、ステップb)において、この第1のモータ部材と第2のモータ部材(110、120、310、320)との間の限定された相対運動の運動方向を決定する。第1のモータ部材と第2のモータ部材(110、120、310、320)との間の限定された相対運動の運動方向に変化が発生するまで、ステップa)およびステップb)を繰り返し、ステップa)が行われるごとに、先に生成された上記磁場(111、311)に対して変化した向きを有する磁場(111、311)を第1のモータ部材(110、310)によって生成し、ここで、磁場(111、311)の向きを、それぞれ所定の配向セクション(170)によって、および、上記の決定された運動方向に応じて変化させる。本発明は、さらに、同期モータ(100、300)を作動させるための増幅器(200)、および、増幅器(200)と同期モータ(100、300)とを備えたシステムにも関する。 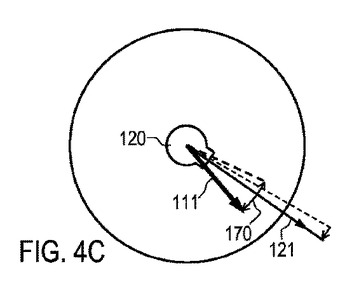 (もっと読む)
(もっと読む)
推力リップル解析方法及び補正方法
【課題】モータで生ずる推力リップルの解析及び補正を精確に行うことができる推力リップル解析方法及び補正方法を提供する。
【解決手段】平面モータ1は固定子としての格子プラテン10と可動子としてのスライダ部20とを備えており、モータ制御装置30の制御によってスライダ部20が格子プラテン10上で移動されるとともに位置決めされる。平面モータ1で生ずる推力リップルを解析する場合には、格子プラテン10に対するスライダ部20の位置を変えながらスライダ部20を微小振動させたときの平面モータ1の応答特性を測定し、格子プラテン10に対するスライダ部20の位置に応じた平面モータ1の応答特性の変化から推力リップルを求める。
(もっと読む)
直線型アクチュエータ
【課題】 推力を高めるとともに、コイルに通流する電流を切り替える際に生じる推力のリップルを抑制した直線型アクチュエータを提供する。
【解決手段】 直線方向にS極とN極が交互に配列された多極磁石11と、多極磁石11の長さ方向に相対移動可能で複数の単位コイルC1〜C6を長さ方向に配列したコイル体21と、多極磁石11に対するコイル体21の長さ方向の位置を検出する磁気センサ22と、磁気センサ22で検出したコイル体21の位置に基づいて各単位コイルC1〜C6に通流する電流を独立して制御する通電制御回路4を備える。コイル体21を構成する全ての単位コイルC1〜C6において推力を発生させて推力を高め、コイル体21に生じる推力の推力リップルを抑制して円滑な動作が可能になる。
(もっと読む)
71 - 80 / 350
[ Back to top ]