
国際特許分類[H02P25/06]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 交流電動機の種別または構造的な細部に特徴を有する交流電動機の制御装置または制御方法 (661) | 電動機の種類に特徴のあるもの (646) | リニアモータ (350)
国際特許分類[H02P25/06]に分類される特許
31 - 40 / 350
振動溶接システム
【課題】システム信頼性に優れた振動溶接システムを提供する。
【解決手段】第1加工物支持部に結合され、第1加工物支持部の往復移動を行うための1対の電磁石と、電磁石に結合され、第1加工物支持部の往復移動を行うために、電磁石を互いに位相ずれで連続的に付勢および消勢する電気駆動システムとを有する。この駆動システムは、DC電流源と、電源を電磁石の各々に制御可能に結合し、電源を電磁石の各々から制御可能に切断する多数の制御可能電子スイッチング・デバイスと、電磁石に結合され、電磁石に供給される電流を表す信号を生成する電流センサと、電子スイッチング・デバイスに結合され、電流センサが生成した信号を受け取り、電磁石の付勢および消勢を制御して第1加工物支持部の往復移動を行うために、スイッチング・デバイスをオンおよびオフにする制御回路とを含む。
(もっと読む)
リニアアクチュエータ駆動装置

【課題】可動子の自重により生じるオフセットズレを補正するリニアアクチュエータ駆動装置を提供する。
【解決手段】駆動装置1は、駆動指令Irefに応じて可動子23を往復させる電磁駆動部10と、通電がなされていない時、可動子23が自重により所定の移動可能範囲Dの中心Dcからズレて可動範囲W1が移動可能範囲Dよりも狭くなる場合に、可動子23の往復動中心Wcと移動可能範囲Dの中心Dcとの偏差を無くする方向へ可動子23の往復動中心Wcを移動させるオフセット通電をなすように駆動指令Irefを補正するオフセット補正部11とを有している。オフセット補正部11は、駆動指令Irefに応じた可動子23の振幅値Lpに対応する振幅情報を取得し、振幅情報に対応する振幅値Lpに対して可動振幅(W1/2)が可動域不足状態となる場合に駆動指令Irefの補正する一方、可動域不足状態でない場合に駆動指令Irefの補正を解除する。
(もっと読む)
リニアモータの制御装置
【課題】磁気センサが出力する信号に周期的な変動成分が含まれる場合においても、リニアモータを安定して制御する。
【解決手段】リニアモータを制御する制御装置は、外部より入力された単位時間当たりに可動子を移動させる距離を示す位置指令に基づいて、可動子を等速にて移動させる等速制御と、可動子の速度を加速させる加速度制御とのいずれか一方を選択し、等速制御を選択した場合、可動子の速度に対する平均である平均速度と、速度指令とに基づいて、リニアモータに印加する電流値を示す電流指令を算出し、加速度制御を選択した場合、可動子の速度と、速度指令とに基づいて、電流指令を算出し、算出した電流指令に基づいてリニアモータに電流を印加する。
(もっと読む)
リニアモータの可動子
【課題】組となるセンサ列の増加の如何にかかわらず、外周フレーム5の円周面のどの位置に配列したとしても、直径の対向間隔をもって一定に維持された状態で、そのセンサ面をコイルブロック3a中心に向けて取着でき、磁気センサ6の検知電圧の大小出力値の平均化により、シャフト2に軸芯ズレが生じても可動子3が中心に位置するものと擬制して位置検出できるようにする。
【解決手段】筒状ユニット3bに設けられたプリント基板35の円周面に、センサ用の端子部35eを、コイルブロック3aの中心を挟んで対向する線上の一方と他方のそれぞれに、電気角180゜のピッチ幅をもって一列状に複数配設し、かつ、他方の列側を一方の列側に対して電気角90゜をもって位置ズレさせて配置させて、対向取着される磁気センサ6によって、二相信号の検出を行うよう構成する。
(もっと読む)
リニアモータの制御装置
【課題】光学式のアブソリュートエンコーダを用いずに、可動子の絶対位置を検出する。
【解決手段】制御装置は、N極とS極とが交互に等間隔に配列方向に配列されている複数の第1の磁石を備える第1の磁石部と、第1の磁石部に対向して電機子に備えられ第1の磁石が生じさせている磁界を検出し、検出した磁界に応じた信号を出力する第1の磁気センサと、配列方向における可動子の可動範囲を複数に分けた区間それぞれを一意に識別させる複数の第2の磁石であって配列方向に等間隔に配列されている複数の第2の磁石を備える第2の磁石部と、第2の磁石部に対向して電機子に備えられ第2の磁石が生じさせている磁界の磁束密度に応じた信号を出力する第2の磁気センサと、第2の磁気センサが出力する信号から検出された区間と、第1の磁気センサが出力する信号から算出された電気角とに基づいて、可動子の位置を算出する位置算出部とを備える。
(もっと読む)
モータ駆動回路
【課題】 アクチュエータの共振周波数によらず、振動が収束するまでの収束時間を短縮する。
【解決手段】 アクチュエータを駆動するボイスコイルモータに供給される駆動電流の目標値を示すデジタル信号である目標電流信号のうち、前記アクチュエータの共振周波数を含む周波数帯域を減衰させるデジタルフィルタと、前記デジタルフィルタの出力信号をアナログ信号に変換して電流制御信号として出力するデジタル・アナログ変換器と、前記電流制御信号に応じて前記ボイスコイルモータに前記駆動電流を供給する駆動回路と、を有する。
(もっと読む)
駆動制御回路およびフォーカス制御回路
【課題】PWM駆動電流に起因するノイズを低減する。
【解決手段】イコライザ30は、対象物の状態に係る目標値とその実測値との差分をもとに、対象物の状態を目標値に合わせるための制御信号を生成する。PWM変調部40は、イコライザ30により生成される制御信号に応じたPWM信号を生成する。Hブリッジ駆動部50は、PWM変調部40により生成されたPWM信号に応じて、対象物の状態を変化させる駆動素子12を駆動するための駆動電流を生成する。スルーレート制御部60は、制御信号に応じて、Hブリッジ駆動部50の電流駆動能力を変化させる。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータの駆動終了時において、最適な停止制御を実現する。
【解決手段】リニア振動モータ200の駆動制御回路100において、駆動信号生成部10は、リニア振動モータ200の駆動終了後、その駆動時に生成していた駆動信号の位相に対して逆位相の駆動信号であって、駆動部20がハイインピーダンス状態に制御されるハイインピーダンス期間を含む駆動信号を生成する。誘起電圧検出部30は、ハイインピーダンス期間にコイルL1に発生する誘起電圧を検出する。コンパレータ41は、所定の不感帯では出力レベルが変化しないヒステリシスコンパレータとしての機能を備え、ハイインピーダンス期間に、ハイレベル信号またはローレベル信号を出力する。駆動信号生成部10は、コンパレータ41から、連続する前記ハイインピーダンス期間に、連続して同相信号が出力されたとき、リニア振動モータ200が停止したと判定する。
(もっと読む)
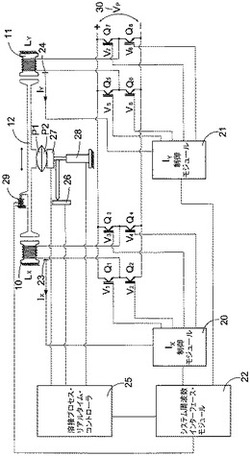
電動アクチュエータ駆動装置及びこれを備えた制振装置
【課題】駆動指令信号が過大になることに対する対策を適正化した電動アクチュエータ駆動装置を提供する。
【解決手段】周期的信号たる電流指令I41の振幅及び位相に対応する振幅情報及び位相情報を有する指令ベクトルに基づいて電流指令I41を生成するものであり、指令ベクトルは互いに交わる複数のベクトルで表現され、指令ベクトルを表現する各ベクトルの大きさを示す適応フィルタ係数(Re、Im)をそれぞれ算出する係数算出手段44と、係数算出手段44により算出される各々の適応フィルタ係数(Re、Im)に基づいて電流指令I41を生成する指令信号生成手段45と、所定の条件が成立している場合に電流上限超過信号S41を生成して係数算出手段44に入力する電流超過検出手段4cとを有し、係数算出手段44は、電流上限超過信号S41が入力されている間、全ての適応フィルタ係数を電流指令I41が制限される方向に修正し、各適応フィルタ係数に対する修正の割合が全ての適応フィルタ係数で同一となるように抜き係数kを用いた。
(もっと読む)
モータ駆動装置
【課題】磁極位置検出手段の情報を簡単に確認する方法を提供する。
【解決手段】磁極位置情報を出力する磁極位置検出手段と、磁極位置情報から磁極位置表示データ情報を出力する表示データ作成手段と、前記磁極位置表示データ情報を表示するデータ表示手段とを有することを特徴としたモータ駆動装置とする。
(もっと読む)
31 - 40 / 350
[ Back to top ]