
国際特許分類[H02P25/06]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 交流電動機の種別または構造的な細部に特徴を有する交流電動機の制御装置または制御方法 (661) | 電動機の種類に特徴のあるもの (646) | リニアモータ (350)
国際特許分類[H02P25/06]に分類される特許
11 - 20 / 350
鉄道用レールブレーキ兼用非接触給電装置
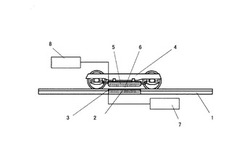
【課題】 車上の二次コイルとしてのレールブレーキ電機子と鉄道用レールに埋め込まれた一次コイルとにより、漏れ磁束の少ない磁気回路を構成することができ、低い周波数でエネルギーを良好に伝達するとともに鉄道車両の重量増を抑制することができる、レールブレーキ兼用非接触給電装置を提供する。
【解決手段】 鉄道用レールブレーキ兼用非接触給電装置は、非接触給電地点の鉄道用レール1に埋め込まれた非接触給電一次コイル2と、鉄道車両の台車4に設置された交流励磁レールブレーキ装置の電機子と兼用される非接触給電二次コイル5と、前記非接触給電一次コイル2に電力を供給する電源7と、前記非接触給電二次コイル5に接続される電力変換器8とを具備する。
(もっと読む)
リニア振動モータの駆動制御装置、リニア振動モータの駆動制御方法および小型電気機器

【課題】電源電圧の低下に起因する動作と、特定の制御モードへの切り換えに起因する動作との混同を抑制することができるリニア振動モータの駆動制御装置、リニア振動モータの駆動制御方法および小型電気機器を提供する。
【解決手段】リニア振動モータの停止制御の開始前後における振動振幅の時間的変化の度合いを、通常の制御モードから他の制御モードへの遷移の前後における度合いよりも小さくする。そのようにすることで、リニア振動モータの停止制御の開始前後における作動音の変化の度合いを、制御モードの遷移前後における作動音の変化の度合いよりも小さくすることができる。すなわち、作動音の変化の度合いの違いによって、電池残容量の低下に伴う停止制御に起因する作動音の変化なのか、制御モードの遷移に起因する作動音の変化なのかを、ユーザは聴覚を通じて識別することが可能となる。
(もっと読む)
リニアアクチュエータの駆動方法
【課題】異常を早期に検出することのできるリニアアクチュエータの駆動方法を提供する。
【解決手段】振幅制御部40は、固定子11に対して往復動される可動子12の振幅を検出し、その検出した振幅の時間的変化に応じて負荷の経時的な変動を検出し、その変動から異常を検出する。また、振幅制御部40は、検出した振幅を制御出力部50に出力する。この制御出力部50は、制御出力部50からの振幅情報に基づいて、可動子12を往復動させるための駆動電流Idを制御する。
(もっと読む)
モータ制御装置、モータ制御方法、及び制御プログラム
【課題】位置制御ゲインを切り替える際の位置偏差を低減させ、整定時間を短縮する。
【解決手段】モータ制御装置は、モータを用いて対象物を目標位置に移動させる際に用いる加速度指令値を時系列に示す加速度パターンを生成し、生成した加速度パターンに対して、モータの応答特性に応じてモータの駆動速度を減速する期間を延ばす変更をし、変更した加速度パターンから位置指令値を出力する指令生成部と、指令生成部が出力する位置指令値と、対象物の目標位置との位置偏差に対する比例制御を用いてモータを駆動するとともに、対象物が目標位置の近傍に達したときに比例制御における比例制御ゲインを現在値より大きい値に変更する制御部とを具備する。
(もっと読む)
モータ駆動回路
【課題】 アクチュエータの共振周波数によらず、振動の収束時間を短縮する。
【解決手段】 アクチュエータを駆動するボイスコイルモータに供給される駆動電流の目標値を示すデジタル信号である目標電流信号のうち、アクチュエータの共振周波数を含む周波数帯域を減衰させるフィルタ回路と、フィルタ回路の出力信号をアナログ信号に変換して電流制御信号として出力するデジタル・アナログ変換器と、電流制御信号に応じてボイスコイルモータに駆動電流を供給する駆動回路と、を有し、フィルタ回路は、入力信号のうち、共振周波数を中心とする周波数帯域を減衰させるデジタルノッチフィルタと、入力信号のうち、共振周波数より低い所定の周波数以上の周波数帯域を減衰させるデジタルローパスフィルタと、を含み、一方のデジタルフィルタには、目標電流信号が入力され、他方のデジタルフィルタには、一方のデジタルフィルタの出力信号が入力される。
(もっと読む)
ドア駆動制御装置及びドア駆動制御方法
【課題】逆転暴走状態を誤認することなく正確に検出可能なドア駆動制御装置、及び、従来よりも安全性を向上させたドア駆動制御方法を提供する。
【解決手段】ドア1の駆動用のモータ2に電力を供給する電力変換器14を備え、ドア1の速度検出値と速度指令値とを用いたフィードバック制御により電力変換器14を運転し、ドア1の速度を制御するドア駆動制御装置に関する。速度検出値を用いてドアの加速度を演算する加速度演算手段と、この加速度演算手段から出力された加速度検出値と前記速度検出値とから所定時間後のドアの速度を予測し、その予測速度が正または負の第3の設定速度を超えた場合に、予測速度異常信号を出力する異常判定手段と、を備える。
(もっと読む)
リニアソレノイドの電流制御装置
【課題】温度や電圧に変化が生じた場合でも所望の電流応答を実現できるリニアソレノイドの電流制御装置を提供することにある。
【解決手段】マイクロコンピュータ22によって目標電流値が変化したと判断された場合には、目標電流値に相当するデューティ値と目標電流前回値に相当するデューティ値との差分を算出する。算出したデューティ値の差分に対して、温度センサSE1の出力値によって温度補正を行う。温度センサSE1の出力値によって補正したデューティ値の差分に対し、さらに電源電圧によって電圧補正を行う。マイクロコンピュータ22は温度と電圧で補正したデューティ値の差分を基に補正後指示電流を算出し、電流制御IC23に出力する。
(もっと読む)
振動発生装置
【課題】機械振動子の固有周波数にバラツキがあっても歩留りが高く低コストで振動触覚ハプティクス効果を発揮できる振動発生装置の提供。
【解決手段】振動発生装置は、減衰比ζ<1で減衰系の機械振動子3をバネ要素Sを介して固定部Bに対し支持し、機械振動子3を非接触で振動させる動磁界を生成する電磁コイルLを備え、このコイルLに印加される駆動電圧V(t)の周波数fを機械振動子3の減衰系固有周波数fdから外れた非共振周波数として機械振動子3がうなり振動を起す。うなり振動の振幅を規定するうなり波のうち駆動開始側の1番谷部から1番山部を超えた2番谷部において駆動電圧V(t)の印加を停止する強制振動制御部20を有する。
(もっと読む)
リニアモータの制御判断方法および制御装置
【課題】可動子を曲線状にも移動させるリニアモータにおける、制御可能性を判断する。
【課題手段】可動子の位置、および、移動の向きを示す位相差のある第1および第2の信号を出力する位置検出センサの読みを用いて、(1)第1の信号の2乗と第2の信号の2乗との和を算出し、(2)2乗和が所定の値以上にあるとき、リニアモータが制御可能であると判断して、リニアモータの制御を行う。
(もっと読む)
モータの過負荷保護装置
【課題】 特定位置、位相で過負荷が発生するような場合でも、温度検出手段を多数設けることなく過負荷検出が行え、かつ過負荷保護設定値の余裕を少なくできて、モータ性能を十分に利用できるモータの過負荷保護装置を提供する。
【解決手段】 電源スイッチ6をオフとしたときの絶対時刻による稼働停止時刻とこの時のベース部温度とを稼働停止時温度記憶手段13に記憶しておく。再稼働開始時温度算出手段13により、稼働停止時の間の冷却温度を計算して、再稼働開始時のベース部温度を算出する。熱発生源現在温度算出手段15により、再稼働開始時のベース部温度を用いて、各極コイル2aのモータ電流で発熱する各熱発生源の現在温度を算出する。過負荷判定手段16は、各熱発生源の現在温度を、各熱発生源毎に定められた過負荷保護設定値に達すると過負荷であると判定する。
(もっと読む)
11 - 20 / 350
[ Back to top ]