
国際特許分類[H02P6/12]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 回転子の位置に依存する電子整流子を有する同期電動機または他の電動機の制御装置;それに用いる電子整流子 (4,020) | 整流の監視;整流故障の表示 (583)
国際特許分類[H02P6/12]に分類される特許
1 - 10 / 583
モータの制御装置
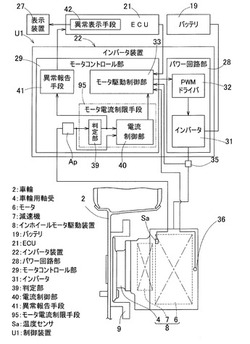
【課題】 車両の運転を急激に妨げることなく、モータを温度管理し、適切な対処が迅速に行えるモータの制御装置を提供する。
【解決手段】 モータ6のモータコイルに、このモータコイルの温度Tcを検出する温度センサSaを設ける。温度センサSaで検出される温度Tcに対し複数の閾値が設定され、各閾値で区分される温度領域毎に、互いに異なる電流制限条件が設定され、検出される温度Tcの含まれる前記温度領域の前記電流制限条件に応じてモータ6の電流値を制限するモータ電流制限手段95を設けた。
(もっと読む)
永久磁石同期電動機のd軸電流を制御するモータ制御装置

【課題】過熱による永久磁石同期電動機の永久磁石の熱減磁が生じる事態を回避することができるモータ制御装置を提供する。
【解決手段】q軸電流及びd軸電流検出部11は、q軸電流Iq及びd軸電流Idを、U相電流IU、V相電流IV及びW相電流IW及びロータ52の回転角度θに基づいて検出する。q軸電流指令値生成部12は、q軸電流指令値Iqcomを速度指令値ωcomに基づいて生成する。d軸電流指令値生成部13は、永久磁石同期電動機5の定常時における永久磁石54a,54b,54c,54dの温度上昇量が最小になるd軸電流指令値Idcomを、ロータ52の回転速度ωに基づいて生成する。
(もっと読む)
ブラシレスモータの駆動制御装置およびハンチング防止方法
【課題】ハンチングを未然に防止する。
【解決手段】ステータに設けられた複数相の電機子コイルに流す電流を制御することにより、ロータを回転させるブラシレスモータの駆動制御装置1は、複数相の電機子コイルに対して通電を行なうインバータ回路2と、インバータ回路2を駆動するための駆動信号を生成するプリドライブ回路3と、単位時間ごとにロータの回転位置を検出するとともに、検出された回転位置に同期して単位時間ごとにパルス列が変化する複数のパルス信号を生成する回転位置検出器5と、ロータの回転方向が逆回転方向から正回転方向に変化する際に、プリドライブ回路3に対して駆動信号のオンデューティ比を増大させるデューティ指令部11と、を備える。
(もっと読む)
単相ブラシレスモータ制御装置
【課題】単相コイルで構成されるモータにおいても、追加部品を必要とせず、駆動回路や電源回路などの耐圧破壊を防ぐ過電圧保護回路を備えた単相ブラシレスモータ制御装置を提供する。
【解決手段】モータコイル13を駆動するドライバ回路11と、ロータの位置を検出した信号と、ドライバ回路11の出力とに基づいて、ドライバ回路11を構成するドライバ回路用スイッチング素子M11〜M14の制御信号を生成するプリドライバ10と、ドライバ回路11の出力の電位が電源電圧から予め設定されたしきい値以上の電位に上昇したとき、回生経路を形成する過電圧検出回路12と、回生経路を構成する回生経路用スイッチング素子とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
モータ電流検出装置、モータ制御装置、及び電動工具
【課題】バッテリからブラシレスモータに流れる平均電流及び瞬間電流をそれぞれ簡素な構成で適切に検出できるようにする
【解決手段】バッテリからブラシレスモータに流れる電流を検出する1つの電流検出抵抗R0と、この電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1以下の周波数帯域の電流成分(平均電流)を抽出する第1フィルタ手段42と、電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1よりも高い第2カットオフ周波数fc2以下の周波数帯域の電流成分(瞬間電流)を抽出する第2フィルタ手段43と、を備えている。このような簡素な構成ながら、高効率・高出力のブラシレスモータにおいて回路保護のために検出すべき平均電流及び瞬間電流を適切に検出することができる。
(もっと読む)
ブラシレスモータの駆動制御装置
【課題】ブラシレスモータの駆動制御装置から外部の上位制御装置に送信される回転速度情報の認識精度を維持する。
【解決手段】ブラシレスモータを外部の上位制御装置からの制御指令に基づいて駆動制御するブラシレスモータの駆動制御装置において、ブラシレスモータの回転速度情報、又はブラシレスモータ及びブラシレスモータの駆動制御装置に発生した異常の内容を表す異常情報を、PWM信号により外部の上位制御装置に送信するときに(S408)、PWM信号の周波数を、回転速度情報又は異常情報に応じて設定し(S406,S407)、PWM信号のデューティ比を、異常が発生したときと発生していないときとで異なる値D1,D3に設定する(S403,S405)。また、異常が発生した場合、ブラシレスモータが回転可能であるときには、デューティ比をさらに異なる値D2に設定して(S404)、周波数を回転速度情報に応じて設定する(S406)。
(もっと読む)
電動パワーステアリング装置
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
モータ制御装置
【課題】回転センサに故障が生じたときでも、モータの駆動を継続することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部25は、レゾルバ2の故障の有無を判定する。レゾルバ2に故障が生じていない通常時は、レゾルバ2の出力を用いて、モータ1が駆動される。レゾルバ2の故障時には、位置推定部60が演算する推定回転位置を用いて、センサレス制御によって、モータ1が駆動される。また、センサレス制御が行われる場合において、低速域用位置推定部61によってロータ回転位置の推定が行われる低速域では、目標電流上限値が、一定以上のロータ位置推定精度が得られる値に制限される。
(もっと読む)
モータ制御装置
【課題】電動車両がスリップを起こした場合にモータ50の過電流を抑制すると共に、トルクの減少を抑制する。
【解決手段】電動車両を駆動するモータ50の回転数Nとトルク指令値Trqcomに応じてモータ50に印加する電圧波形を矩形波形又は非矩形波形に設定するマップを含み、マップに基づいてモータ50を制御する電動車両のモータ制御装置であって、電動車両がスリップしたと判定した際に、マップの矩形波形を印加する領域の中に矩形波形を印加することを禁止する矩形禁止領域Aを設定し、モータ50の回転数Nとトルク指令値Trqcomとが矩形禁止領域Aに入った場合に、モータ50に印加する電圧波形を矩形波形から非矩形波形に切り替えるとともに、モータ50の制御方式を最大トルク制御から弱め界磁制御に切り替える。
(もっと読む)
1 - 10 / 583
[ Back to top ]