
ロボットコントローラ
【課題】電源コネクタが電源モジュールに接続されたままでこれらモジュールが分離されることがなく、モジュール間の電気接続部分がむき出しになることがないようにする。
【解決手段】中継コネクタ5を電源モジュール2に固定される第1のコネクタ6と、CPUモジュール3に固定される第2のコネクタ7とから構成し、第2のコネクタ7と第1のコネクタ6との結合時に第2の凸部7bと第3の凸部7cとの間に形成された第1の凹部7dと第1の凸部6bとが嵌合し、且つ第2のアース端子挿通孔部7e、第1のアース端子挿通孔部6c及び第3のアース端子挿通孔部7fが一直線に対向し連通する構成とし、電源コネクタ4のアース端子4cを第2のアース端子挿通孔部7e、第1のアース端子挿通孔部6c及び第3のアース端子挿通孔部7fに挿入する構成とした。
【解決手段】中継コネクタ5を電源モジュール2に固定される第1のコネクタ6と、CPUモジュール3に固定される第2のコネクタ7とから構成し、第2のコネクタ7と第1のコネクタ6との結合時に第2の凸部7bと第3の凸部7cとの間に形成された第1の凹部7dと第1の凸部6bとが嵌合し、且つ第2のアース端子挿通孔部7e、第1のアース端子挿通孔部6c及び第3のアース端子挿通孔部7fが一直線に対向し連通する構成とし、電源コネクタ4のアース端子4cを第2のアース端子挿通孔部7e、第1のアース端子挿通孔部6c及び第3のアース端子挿通孔部7fに挿入する構成とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はロボットコントローラに関する。
【背景技術】
【0002】
従来、ロボットコントローラは、全ての機能を一つの筐体に組み込んだいわゆるオールインワンタイプであるが、全機能を必要としないロボットに対するコントローラとしては、過剰性能となって、コスト高となってしまう。この改善策として、各機能をモジュール化し、必要なモジュールを連結したモジュールボックスとしてコントローラを構成することで、必要な性能のみを満たしてコストの低廉化を実現するようにすることを考えている。
【0003】
ここで、上述の各モジュールとしては、電源モジュールや、CPUモジュール、I/Oモジュールなどがあり、上記電源モジュールには中継コネクタを組付け、この中継コネクタに電源コネクタを接続するようにしている。上記電源モジュールは電源コネクタから電源(例えばAC200V)を得て、CPUモジュール用の制御電源を形成してCPUモジュールに供給し、あるいはロボット動作用電源を形成してロボットに供給する。
【0004】
ところで、各モジュールが組み合わせられ且つ前記電源コネクタを中継コネクタに接続した状態で、各モジュールが分離されるようなことがあると、モジュール間で電気接続部部がむき出しになるおそれがあり、これは避けなければならない。なお、二つの結合した電気部品を取り外すときに、両電気部品を繋ぐ連結コネクタを取り外さない限り、両電気部品を取り外し得ない技術として、特許文献1がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−211083号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は上述の事情に鑑みてなされたものであり、その目的は、電源モジュールに他のモジュールを結合して構成されるロボットコントローラにおいて、電源コネクタが電源モジュールに接続されたままでこれらモジュールが分離されることがなく、モジュール間の電気接続部分がむき出しになることがないロボットコントローラを提供することにある。
【課題を解決するための手段】
【0007】
請求項1のロボットコントローラにおいては、中継コネクタを、電源モジュールにおける他のモジュールとの結合面に固定される第1のコネクタと、他のモジュールにおける電源モジュールとの結合面に固定される第2のコネクタとから構成し、さらに、前記第1のコネクタに第1の凸部を備え、この第1の凸部にはこれの突出方向と直交する方向で当該第1の凸部を貫通する第1のアース端子挿通孔部を形成し、当該第1のコネクタの一端部に第1の給電端子接続孔部を形成し、第2のコネクタに前記第1のコネクタ方向へ突出する第2の凸部及び第3の凸部を備え、さらに前記第2の凸部にはこれの突出方向と直交する方向で当該第2の凸部を貫通する第2のアース端子挿通孔部を形成し、さらにこの第2の凸部には第2の給電端子接続孔部を形成し、前記第3の凸部にはこの第2のアース端子挿通孔部と対向する第3のアース端子挿通孔部を形成した。そして第2のコネクタと前記第1のコネクタとの結合時に前記第2の凸部と第3の凸部との間に形成された第1の凹部と前記第1の凸部とが嵌合し、且つ前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部が一直線に連通する構成とし、そして、前記電源コネクタのアース端子を前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部に挿入する構成とした。
【0008】
これによれば、電源モジュールと他のモジュールとを結合すると、中継コネクタの第1のコネクタ及び第2のコネクタも結合される。そして、一直線状となった第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部に電源コネクタのアース端子を挿入すると共に、第1の給電端子を第1の給電端子接続孔部に、又第2の給電端子を第1の給電端子接続孔部に、夫々挿入し、もって、電源コネクタを中継コネクタを介して電源モジュールに接続する。この状態においては、電源コネクタのアース端子が第2のコネクタの第2のアース端子挿通孔部、第1のコネクタの第1のアース端子挿通孔部及び第2のコネクタの第3のアース端子挿通孔部に渡っていることで、このアース端子で両コネクタひいては両モジュールが連結された状態となっているから、作業者が電源コネクタを抜き忘れたままで両モジュールを分離させようとしても、このアース端子によりその分離を阻止できる。この結果、電源コネクタが電源モジュールに接続されたままでこれらモジュールが分離されることがなく、モジュール間の電気接続部分がむき出しになることがない。さらに、既存の電源コネクタのアース端子をモジュール分離防止に利用できて、新たな部材を設けずに済み、コストの低廉化に寄与できる。
【0009】
ここで、作業者が、通常の力で両モジュールを分離しようと外力を加えた場合、上述したように、電源コネクタのアース端子によって上記分離を防止できるが、作業者によっては不慣れな作業者もおり、両モジュールを分離しようと無理に大きな外力を加えてしまうこともある。この場合、両モジュールが完全分離することはないものの、両モジュールが僅かに開き気味となり、電気的接続部分の露出はないものの、電源コネクタのアース端子が外力を受けて変形すると共に、両給電端子が外側へ開くように変形してしまうおそれもある。
【0010】
これでは、電源コネクタを引き抜くにも容易には引き抜くのが困難となってしまい、又引き抜き得たとしても、今度は変形したアース端子がアース端子挿通孔部に入らず、中継コネクタに再接続ができない。
【0011】
そこで、請求項2のロボットコントローラでは、前記電源コネクタのアース端子を断面矩形状に形成し、前記第1のコネクタの第1の本体に、その一端部から前記第2のコネクタ方向へ突出して当該第2のコネクタの一端面を覆う端壁部を設け、この端壁部には、当該第1のアース端子挿通孔部と対向する第4のアース端子挿通孔部を形成し、さらに第1の給電端子接続孔部及び第2の給電端子接続孔部を形成し、前記第4のアース端子挿通孔部、前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部の各幅寸法は、前記アース端子の幅寸法よりも大きく設定し、これら前記第4のアース端子挿通孔部、前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部のうち、前記電源モジュールと導通されるアース端子挿通孔部の上下内面を、前記電源コネクタのアース端子に上下から圧接する接点用導体により構成し、前記電源コネクタのアース端子を前記第4のアース端子挿通孔部、前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部に挿入し、前記電源コネクタの第1の給電端子を前記第1の給電端子接続孔部に挿入し、前記電源コネクタの第2の給電端子を前記第2の給電端子接続孔部に挿入する構成とした。
【0012】
これによれば、まず、第1のコネクタの端壁部に第1の給電端子接続孔部及び第2の給電端子接続孔部を形成しているから、両モジュールが僅かに分離(両コネクタが僅かに開く)することがあっても、これら第1の給電端子接続孔部及び第2の給電端子接続孔部が離れることはなく、よってこれら第1の給電端子接続孔部及び第2の給電端子接続孔部に接続した電源コネクタの第1の給電端子及び第2の給電端子が開くように変形することがない。又、電源コネクタのアース端子の幅よりも各アース端子挿通孔部の幅が大きいから当該アース端子の変形自体を少なくでき、又、変形したとしても、両コネクタの開きを修正処理してアース端子を再挿入する場合に電源コネクタのアース端子の幅よりも各アース端子挿通孔部の幅が大きいから変形したアース端子の挿入が可能で、且つ上述したように両給電端子も変形しないから、中継コネクタへの電源コネクタの再接続が可能となる。
【0013】
又、請求項3のロボットコントローラにおいては、前記第1のコネクタ及び前記第2のコネクタには、両者間に跨る電気接続部が有り、前記第1のコネクタ及び第2のコネクタのいずれか一方に、少なくとも前記電気接続部部分を覆う庇部を設けたところに特徴を有する。
【0014】
上述したように、両モジュールを過度な力で分離しようとすると、これらが僅かながら開くことがあり、第1のコネクタ及び第2のコネクタも開き気味となる。このとき両コネクタ間に跨る電気接続部が露出するおそれがあるが、上記請求項3によれば、前記庇部でこの電気接続部部分を覆っているから、当該電気接続部が露出することはない。
【図面の簡単な説明】
【0015】
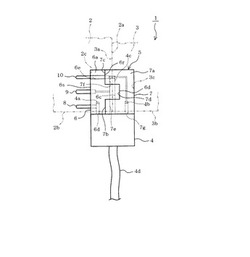
【図1】本発明の第1の実施形態を示す電源コネクタ及び中継コネクタ部分の平面図
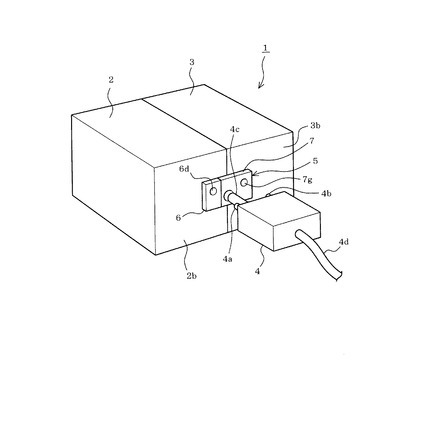
【図2】電源コネクタ挿入前のロボットコントローラ全体の斜視図
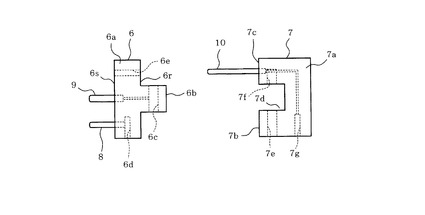
【図3】中継コネクタを分離した状態での平面図
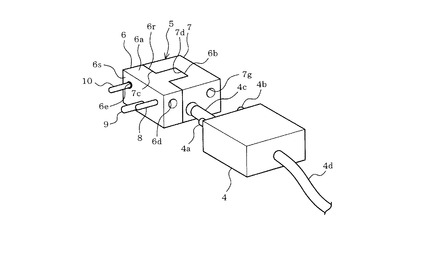
【図4】電源コネクタ及び中継コネクタの接続前の斜視図
【図5】第2の実施形態を示す図1相当図
【図6】分離状態の中継コネクタと電源コネクタとの斜視図
【図7】電源コネクタ及び中継コネクタの接続前の平面図
【図8】電源コネクタの各端子を正面から見た図
【図9】第1のアース端子挿通孔部部分の縦断正面図
【図10】第2〜第4のアース端子挿通孔部部分の縦断正面図
【図11】アース端子変形状態での再接続状態を示す平面図
【図12】第3の実施形態を示す図1相当図
【図13】中継コネクタを分離した状態での平面図
【図14】中継コネクタを分離した状態での斜視図
【図15】参考例を示す図1相当図
【図16】電源コネクタの平面図
【図17】別の参考例を示す分離状態の中継コネクタと電源コネクタとの斜視図
【発明を実施するための形態】
【0016】
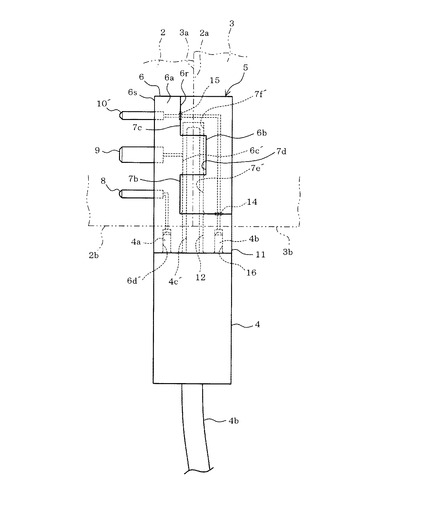
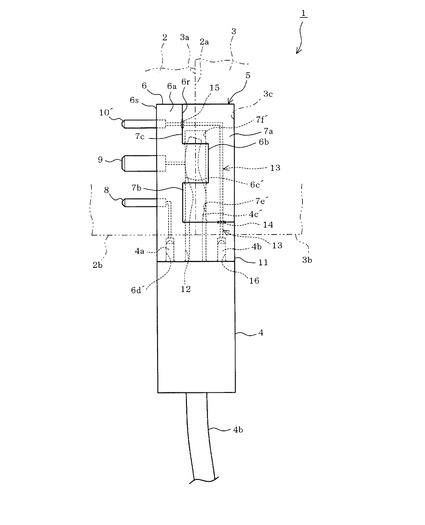
以下、本発明の第1の実施形態について、図1ないし図4を参照して説明する。図2に示す本実施形態のロボットコントローラ1は、電源モジュール2と、これに横並びに結合される他のモジュールとしての例えばCPUモジュール3と、電源コネクタ4と、中継コネクタ5とを備えて構成されている。なお、他のモジュールとしては複数備えても良く、この場合も電源モジュールに対して横並びに順次接合する。
【0017】
前記電源モジュール2は、外部電源(例えばAC200V)を前記電源コネクタ4及び中継コネクタ5を介して得て、この外部電源をCPU用電源に変換してCPUモジュール3に供給し、又、ロボット駆動用電源を生成してロボットに供給する。CPUモジュール3は、ロボットや他の制御モジュールなどを制御する。
【0018】
前記電源モジュール2とCPUモジュール3とは夫々の結合面2aと結合面3aとで結合されるようになっており、この結合によって両モジュール2、3の電気的な接続もなされるようになっている。
【0019】
前記電源モジュール2には、前記結合面2aと前面部2b(図1及び図2参照、前面は電源コネクタ4が接続される側の面をいう)とのコーナー部には、コネクタ配設用凹部2cが形成されている。又、CPUモジュール3には、前記結合面3aと前面部3b(図1及び図2参照)とのコーナー部に、コネクタ配設用凹部3cが形成されている。
【0020】
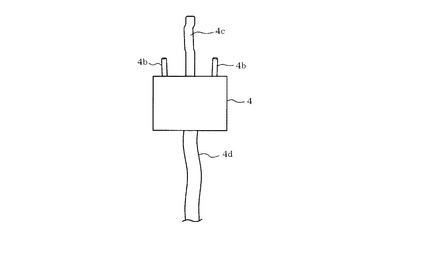
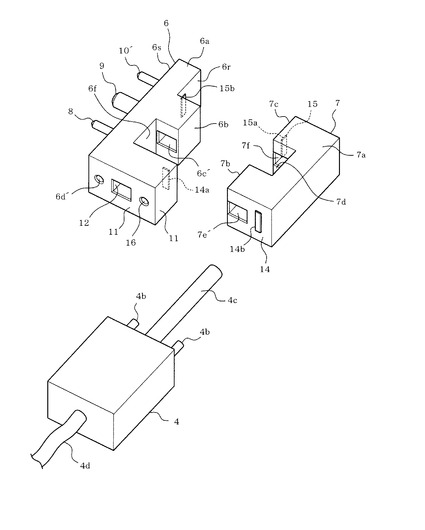
前記電源コネクタ4は、一側面に第1の給電端子4aと第2の給電端子4bとアース端子4cとを突出して有する。各端子4a〜4cは円柱状をなし、アース端子4cは給電端子4a、4bより太くそして長く形成されている。なお、当該電源コネクタ4の他側面には電源ケーブル4dが接続されている。
【0021】
前記中継コネクタ5は、前記電源モジュール2における前記CPUモジュール3との結合面2aのコネクタ配設用凹部2cに挿入固定される第1のコネクタ6と、前記CPUモジュール3における前記電源モジュール2との結合面3aのコネクタ配設用凹部3cに挿入固定される第2のコネクタ7とから構成されている。
【0022】
前記第1のコネクタ6は、第1の本体部6aと、この第1の本体部6aにおいて前記第2のコネクタ7と対向する一面部6rの中間部位に前記第2のコネクタ7方向へ突出するように形成された第1の凸部6bとを備え、さらにこの第1の凸部6bにはこれの突出方向と直交する方向で当該第1の凸部6bを貫通する第1のアース端子挿通孔部6cが形成され、且つ前記第1の本体部6aの一端部(前端部)に第1の給電端子接続孔部6dが形成されている。
【0023】
又、前記第1のアース端子挿通孔部6c内面には図示しないが接点用導体が設けられており、電源コネクタ4のアース端子4cと電気的に接続されるようになっている。さらに、前記第1の給電端子接続孔部6dの内面には図示しないが接点用導体が設けられており、電源コネクタ4の第1の給電端子4aと電気的に接続されるようになっている。
【0024】
さらに、この第1のコネクタ6の他面部6sには、対電源モジュール用給電ピン8及び対電源モジュール用アースピン9が突設されており、対電源モジュール用給電ピン8は前記第1の給電端子接続孔部6dと電気的に導通されている。又、前記対電源モジュール用アースピン9は第1のアース端子挿通孔部6cと電気的に導通されている。
【0025】
又、この第1のコネクタ6の第1の本体部6aの後部には横方向(第2のコネクタ7と対向する方向)にピン挿通孔部6e(図3参照)が形成されている。
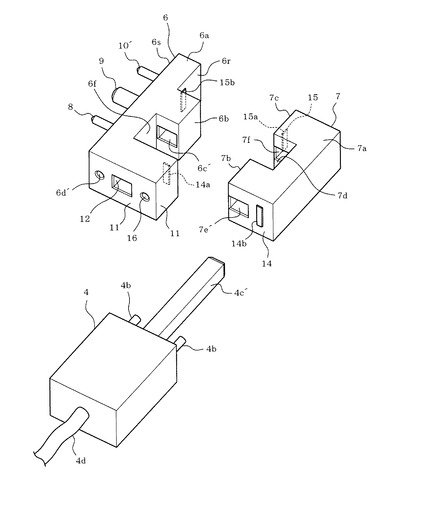
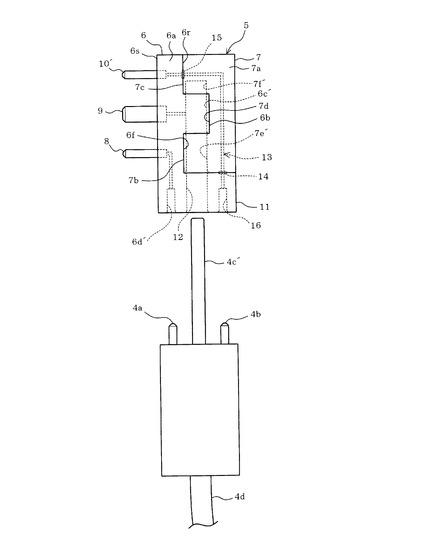
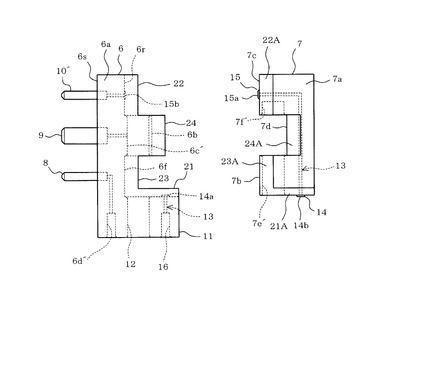
前記第2のコネクタ7は、図3に示すように、第2の本体部7aと、この第2の本体部7aの一端部(前端部)から前記第1のコネクタ6方向へ突出する第2の凸部7bと、当該第2の本体部7aの他端部(後端部)から前記第1のコネクタ6方向へ突出する第3の凸部7cと、この第2の凸部7bと第3の凸部7cとの間に形成された第1の凹部7dとを備え、さらに前記第2の凸部7bにはこれの突出方向と直交する方向で当該第2の凸部7bを貫通する第2のアース端子挿通孔部7eが形成され、前記第3の凸部7cにはこの第2のアース端子挿通孔部7eと対向する第3のアース端子挿通孔部7fが形成され、前記第2の本体部7aの前端部には、第2の給電端子接続孔部7gが形成されている。前記第3のアース端子挿通孔部7fは、前記第3の凸部7cの途中部まで形成されているが、第2のアース端子挿通孔部7eと同様に両端が開通する形態でも良い。前記第2の給電端子接続孔部7gの内面には図示しないが接点用導体が設けられており、電源コネクタ4の第2の給電端子4bと電気的に接続されるようになっている。
【0026】
又、この第2のコネクタ7の前記第3の凸部7cの先端部には対電源モジュール用給電ピン10が突設されており、この対電源モジュール用給電ピン10は前記第2の給電端子接続孔部7gと電気的に導通している。又、この対電源モジュール用給電ピン10は前記第1のコネクタ6のピン挿通孔部6eに挿通されるものである。
【0027】
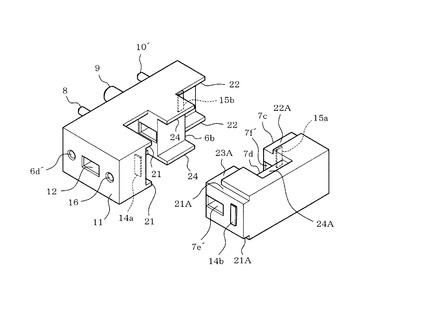
上記構成において、ロボットコントローラ1を組み立てる場合、電源モジュール2に第1のコネクタ6を組み込んで固定し、CPUモジュール3に第2のコネクタ7を組み込んで固定する。そして、電源モジュール2とCPUモジュール3とを結合する。この場合、第2のコネクタ7の対電源モジュール用給電ピン10が第1のコネクタ6のピン挿通孔部6eを貫通して当該第1のコネクタ6から突出し、又、第1のコネクタ6の第1の凸部6bと第2のコネクタ7の第1の凹部7dとが嵌合し、且つ第2のアース端子挿通孔部7e、第1のアース端子挿通孔部6c及び第3のアース端子挿通孔部7fが一直線に対向し連通する。
【0028】
そして、電源コネクタ4のアース端子4cを上述した一直線状の第2のアース端子挿通孔部7e、第1のアース端子挿通孔部6c及び第3のアース端子挿通孔部7fに挿入すると共に、電源コネクタ4の第1の給電端子4a及び第2の給電端子4bを夫々前記第1の給電端子接続孔部6d及び第2の給電端子接続孔部7gに挿入する。これにより電源コネクタ4の各給電端子4a、4b、アース端子4cが夫々中継コネクタ5の対電源モジュール用給電ピン8、対電源モジュール用給電ピン10、対電源モジュール用アースピン9を介して電源モジュール2に接続され、もって外部電源が電源モジュール2に供給される。
【0029】
この状態においては、電源コネクタ4のアース端子4cが第2のコネクタ7の第2のアース端子挿通孔部7e、第1のコネクタ6の第1のアース端子挿通孔部6c及び第2のコネクタ7の第3のアース端子挿通孔部7fに渡っていることで、このアース端子4cで両コネクタ6、7ひいては両モジュール2、3が連結された状態となっているから、作業者が電源コネクタ4を抜き忘れたままで両モジュール2、3を分離させようとしても、アース端子4cにより、その分離を阻止できる。この結果、電源コネクタ4が電源モジュール2及びCPUモジュール3に接続されたままでこれらモジュール2、3が分離されることがなく、モジュール2、3間の電気接続部分がむき出しになることがない。さらに、既存の電源コネクタ4のアース端子4cをモジュール分離防止に利用できて、新たな部材を設けずに済み、コストの低廉化に寄与できる。
【0030】
図5ないし図11は第2の実施形態を示している。この第2の実施形態は次の点を考慮したものである。前記第1の実施形態において、仮に、不慣れな作業者が、両モジュール2、3を分離しようと無理に大きな外力を加えてしまうと、両モジュール2、3が完全分離することはないものの、両モジュール2、3が図15に示すように、僅かに開き気味となり(図15では判りやすくするために開き角度を大きめに表している)、電気的接続部分の露出はないものの、図16に示すように、電源コネクタ4のアース端子4cが外力を受けて変形すると共に、両給電端子4a、4bが外側へ開くように変形してしまうおそれもある。
【0031】
これでは、電源コネクタ4を引き抜くにも容易には引き抜くのが困難となってしまい、又引き抜き得たとしても、今度は中継コネクタ5に再接続ができない。
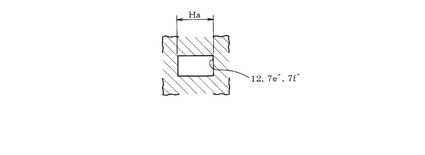
そこで、この第2の実施形態では、第1の実施形態と異なる点について説明すると、図6に示すように、前記電源コネクタ4のアース端子4c´を断面矩形状に形成し、前記第1のコネクタ6の第1の本体部6aの一端部(前端部)に、この前端部から前記第2のコネクタ7方向へ突出して当該第2のコネクタ7の一端面(前端面)を覆う端壁部11を形成している。この端壁部11と第1の凸部6bの間に第2の凹部6fが形成される。又、この端壁部11には、第1のアース端子挿通孔部6c´と対向する第4のアース端子挿通孔部12を形成し、さらに第1の給電端子接続孔部6d´及び第2の給電端子接続孔部16を形成し、前記第4のアース端子挿通孔部12、第2のアース端子挿通孔部7e´、第1のアース端子挿通孔部6c´及び第3のアース端子挿通孔部7f´の各幅寸法Ha(図9参照)は、アース端子4c´の幅寸法Hb(図8参照)よりも大きく設定し、これら前記第4のアース端子挿通孔部12、前記第2のアース端子挿通孔部7e´、第1のアース端子挿通孔部6c´及び第3のアース端子挿通孔部7f´のうち、前記電源モジュール2と導通される第1のアース端子挿通孔部6c´の上下内面を、前記電源コネクタ4のアース端子4c´に上下から圧接するばね性を有する平板状の接点用導体6A、6B(図9参照)により構成している。
【0032】
そして、第1の実施形態の対電源モジュール用給電ピン10は、この第2の実施形態では、第1のコネクタ6の他面部6sに設けている(符号を10から10´に変更している)。
【0033】
又、第2の給電端子接続孔部16と上記対電源モジュール給電ピン10´とを導通するために、導電路13が第1のコネクタ6及び第2のコネクタ7に渡って形成されており、この導電路13には、両コネクタ6、7間に跨る電気接続部14、15が設けられている。
【0034】
一方の電気接続部14は、図16に示すように、第1のコネクタ6の端壁部11の背面に設けられた接点用導体14aと前記第1の凸部7bの前面に設けられた接点用導体14bとからなり、いずれも相互に圧接する方向にばね性を有する。他方の電気接続部15は第2のコネクタ7の第2の凸部7bの先端面に設けられた接点15aと、第1のコネクタ6の第1の本体部6aの他端部側の一面部6rに設けられた接点15bとからなり、いずれも相互に圧接する方向にばね性を有する。
【0035】
前記第1のコネクタ6を組み込んだ電源モジュール2と、第2のコネクタ7を組み込んだCPUモジュール3とを結合すると、第1のコネクタ6の第1の凸部6bが第2のコネクタ7の第1の凹部7dに嵌合すると共に、第2の凸部7bが第2の凹部6fに嵌合し、電気接続部14の両接点用導体14a及び14bが圧接して導通し、又電気接続部15の両用導体接点15a及び15bも圧接して導通する。さらに、前記第4のアース端子挿通孔部12、前記第2のアース端子挿通孔部7e´、第1のアース端子挿通孔部6c´及び第3のアース端子挿通孔部7f´が一直線状に対向し連通する。
【0036】
電源モジュール2に電源コネクタ4の電源を接続する場合、電源コネクタ4のアース端子4c´を前記第4のアース端子挿通孔部12、前記第2のアース端子挿通孔部7e´、第1のアース端子挿通孔部6c´及び第3のアース端子挿通孔部7f´に挿入し、前記電源コネクタ4の第1の給電端子4aを前記第1の給電端子接続孔部6´に挿入し、前記電源コネクタ4の第2の給電端子4bを前記第2の給電端子接続孔部16に挿入する。
【0037】
上述した第2の実施形態によれば、まず、第1のコネクタ6の端壁部11に第1の給電端子接続孔部6´及び第2の給電端子接続孔部16を形成しているから、両モジュール2、3が僅かに分離(両コネクタ6、7が僅かに開く)することがあっても、これら第1の給電端子接続孔部6´及び第2の給電端子接続孔部16が離れることはなく、よってこれら第1の給電端子接続孔部6´及び第2の給電端子接続孔部16に接続した電源コネクタ4の第1の給電端子4a及び第2の給電端子4bが開くように変形することがない。
【0038】
又、電源コネクタ4のアース端子4c´の幅よりも各アース端子挿通孔部12、7e´、6c´、7f´の幅が大きいから、当該アース端子4c´の変形自体を少なくでき、又、変形したとしても、この変形状態のアース端子4c´を、両コネクタ6、7に再挿入する場合に、電源コネクタ4のアース端子4c´の幅よりも各アース端子挿通孔部12、7e´、6c´、7f´の幅が大きいから変形したアース端子4c´の挿入が可能で、且つ上述したように両給電端子4a、4bも変形しないから、図11に示すように、中継コネクタ5への電源コネクタ4の再接続が可能となる。
【0039】
なお、図17のように、電源コネクタ4のアース端子4cが円柱状であっても、前記各アース端子挿通孔部12、7e´、6c´、7f´が幅広であれば、アース端子4cが変形しても、上述の第2の実施形態と同様、電源モジュール2の再接続ができるといった効果を得るが、しかし、この場合アース端子4cと上記アース端子挿通孔部6c´との接触箇所が少なく、接続信頼性に劣る。
【0040】
これに対して、この第2の実施形態では、アース端子4c´を断面矩形状として、例えこのアース端子4c´が変形したとしても、上記アース端子挿通孔部6c´との接触面積を広く確保でき、接続信頼性が低下することはない。
【0041】
図12ないし図14には、第3の実施形態を示しており、この実施形態においては、前記第1のコネクタ6及び第2のコネクタ7のうち例えば第1のコネクタ6の上下面に前記一方の電気接続部14部分を覆う庇部21を形成すると共に、他方の電気接続部15部分を覆う庇部22を形成し、さらに庇部23、24を形成し、又、第2のコネクタ7の上下面に庇部21と嵌合する段部21A、庇部22と嵌合する22A、庇部23と嵌合する23A、庇部24と嵌合する24Aを形成した点が第2の実施形態と異なる。
【0042】
既述したように、両モジュール2、3を過度な力で分離しようとすると、これらが僅かながら開くことがあり、第1のコネクタ6及び第2のコネクタ7も開き気味となる。このとき両コネクタ6、7間に跨る電気接続部14、15が露出するおそれがあるが、上記第3の実施形態によれば、庇部21、22で夫々電気接続部14、15部分を覆っているから、当該電気接続部14、15が露出することはない。なお、庇部23、24は、前記庇部21、22と共に、埃などの侵入防止を図ることができる。なおこれら庇部21〜24は第2のコネクタ7に設け、段部21A〜24Aは第1のコネクタ6に設けても良い。
【0043】
なお、本発明の実施形態は上述した各実施形態に限られるものではない。例えば、対電源モジュール用給電ピン8、対電源モジュール用アースピン9、対電源モジュール用給電ピン10、10´の設置部位は第1のコネクタ6及び第2のコネクタ7のいずれに設けても良く、第2のコネクタ7に設けた場合には第1のコネクタ6側へ突出させる構成とすれば良い。又、第1のアース端子挿通孔部6c、6c´、第1の給電端子接続孔部6d、6d´、第2の給電端子接続孔部7g、16から、対電源モジュール用給電ピン8、対電源モジュール用アースピン9、対電源モジュール用給電ピン10、10´への導通路は適宜変更しても良い。又、前記各アース端子挿通孔部12、7e(7e´)、7f(7f´)のいずれか一つ又は全部を対電源モジュール用アースピン9と導通させても良い。
【符号の説明】
【0044】
図面中、1はロボットコントローラ、2は電源モジュール、3はCPUモジュール(他のモジュール)、4は電源コネクタ、4aは第1の給電端子、4bは第2の給電端子、4c、4c´はアース端子、5は中継コネクタ、6は第1のコネクタ、6aは第1の本体部、6bは第1の凸部、6c、6c´は第1のアース端子挿通孔部、6d、6d´は第1の給電端子接続孔部、6fは第2の凹部、6A、6Bは接点用導体、7は第2のコネクタ、7aは第2の本体部、7bは第2の凸部、7cは第3の凸部、7dは第1の凹部、7e、7e´は第2のアース端子挿通孔部、7f、7f´は第3のアース端子挿通孔部、7g、16は第2の給電端子接続孔部、8は対電源モジュール用給電ピン、9は対電源モジュール用アースピン、10、10´は対電源モジュール用給電ピン、11は端壁部、12は第4のアース端子挿通孔部、13は導電路、14、15は電気接続部、16は第2の給電端子接続孔部、21、22は庇部を示す。
【技術分野】
【0001】
本発明はロボットコントローラに関する。
【背景技術】
【0002】
従来、ロボットコントローラは、全ての機能を一つの筐体に組み込んだいわゆるオールインワンタイプであるが、全機能を必要としないロボットに対するコントローラとしては、過剰性能となって、コスト高となってしまう。この改善策として、各機能をモジュール化し、必要なモジュールを連結したモジュールボックスとしてコントローラを構成することで、必要な性能のみを満たしてコストの低廉化を実現するようにすることを考えている。
【0003】
ここで、上述の各モジュールとしては、電源モジュールや、CPUモジュール、I/Oモジュールなどがあり、上記電源モジュールには中継コネクタを組付け、この中継コネクタに電源コネクタを接続するようにしている。上記電源モジュールは電源コネクタから電源(例えばAC200V)を得て、CPUモジュール用の制御電源を形成してCPUモジュールに供給し、あるいはロボット動作用電源を形成してロボットに供給する。
【0004】
ところで、各モジュールが組み合わせられ且つ前記電源コネクタを中継コネクタに接続した状態で、各モジュールが分離されるようなことがあると、モジュール間で電気接続部部がむき出しになるおそれがあり、これは避けなければならない。なお、二つの結合した電気部品を取り外すときに、両電気部品を繋ぐ連結コネクタを取り外さない限り、両電気部品を取り外し得ない技術として、特許文献1がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−211083号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は上述の事情に鑑みてなされたものであり、その目的は、電源モジュールに他のモジュールを結合して構成されるロボットコントローラにおいて、電源コネクタが電源モジュールに接続されたままでこれらモジュールが分離されることがなく、モジュール間の電気接続部分がむき出しになることがないロボットコントローラを提供することにある。
【課題を解決するための手段】
【0007】
請求項1のロボットコントローラにおいては、中継コネクタを、電源モジュールにおける他のモジュールとの結合面に固定される第1のコネクタと、他のモジュールにおける電源モジュールとの結合面に固定される第2のコネクタとから構成し、さらに、前記第1のコネクタに第1の凸部を備え、この第1の凸部にはこれの突出方向と直交する方向で当該第1の凸部を貫通する第1のアース端子挿通孔部を形成し、当該第1のコネクタの一端部に第1の給電端子接続孔部を形成し、第2のコネクタに前記第1のコネクタ方向へ突出する第2の凸部及び第3の凸部を備え、さらに前記第2の凸部にはこれの突出方向と直交する方向で当該第2の凸部を貫通する第2のアース端子挿通孔部を形成し、さらにこの第2の凸部には第2の給電端子接続孔部を形成し、前記第3の凸部にはこの第2のアース端子挿通孔部と対向する第3のアース端子挿通孔部を形成した。そして第2のコネクタと前記第1のコネクタとの結合時に前記第2の凸部と第3の凸部との間に形成された第1の凹部と前記第1の凸部とが嵌合し、且つ前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部が一直線に連通する構成とし、そして、前記電源コネクタのアース端子を前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部に挿入する構成とした。
【0008】
これによれば、電源モジュールと他のモジュールとを結合すると、中継コネクタの第1のコネクタ及び第2のコネクタも結合される。そして、一直線状となった第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部に電源コネクタのアース端子を挿入すると共に、第1の給電端子を第1の給電端子接続孔部に、又第2の給電端子を第1の給電端子接続孔部に、夫々挿入し、もって、電源コネクタを中継コネクタを介して電源モジュールに接続する。この状態においては、電源コネクタのアース端子が第2のコネクタの第2のアース端子挿通孔部、第1のコネクタの第1のアース端子挿通孔部及び第2のコネクタの第3のアース端子挿通孔部に渡っていることで、このアース端子で両コネクタひいては両モジュールが連結された状態となっているから、作業者が電源コネクタを抜き忘れたままで両モジュールを分離させようとしても、このアース端子によりその分離を阻止できる。この結果、電源コネクタが電源モジュールに接続されたままでこれらモジュールが分離されることがなく、モジュール間の電気接続部分がむき出しになることがない。さらに、既存の電源コネクタのアース端子をモジュール分離防止に利用できて、新たな部材を設けずに済み、コストの低廉化に寄与できる。
【0009】
ここで、作業者が、通常の力で両モジュールを分離しようと外力を加えた場合、上述したように、電源コネクタのアース端子によって上記分離を防止できるが、作業者によっては不慣れな作業者もおり、両モジュールを分離しようと無理に大きな外力を加えてしまうこともある。この場合、両モジュールが完全分離することはないものの、両モジュールが僅かに開き気味となり、電気的接続部分の露出はないものの、電源コネクタのアース端子が外力を受けて変形すると共に、両給電端子が外側へ開くように変形してしまうおそれもある。
【0010】
これでは、電源コネクタを引き抜くにも容易には引き抜くのが困難となってしまい、又引き抜き得たとしても、今度は変形したアース端子がアース端子挿通孔部に入らず、中継コネクタに再接続ができない。
【0011】
そこで、請求項2のロボットコントローラでは、前記電源コネクタのアース端子を断面矩形状に形成し、前記第1のコネクタの第1の本体に、その一端部から前記第2のコネクタ方向へ突出して当該第2のコネクタの一端面を覆う端壁部を設け、この端壁部には、当該第1のアース端子挿通孔部と対向する第4のアース端子挿通孔部を形成し、さらに第1の給電端子接続孔部及び第2の給電端子接続孔部を形成し、前記第4のアース端子挿通孔部、前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部の各幅寸法は、前記アース端子の幅寸法よりも大きく設定し、これら前記第4のアース端子挿通孔部、前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部のうち、前記電源モジュールと導通されるアース端子挿通孔部の上下内面を、前記電源コネクタのアース端子に上下から圧接する接点用導体により構成し、前記電源コネクタのアース端子を前記第4のアース端子挿通孔部、前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部に挿入し、前記電源コネクタの第1の給電端子を前記第1の給電端子接続孔部に挿入し、前記電源コネクタの第2の給電端子を前記第2の給電端子接続孔部に挿入する構成とした。
【0012】
これによれば、まず、第1のコネクタの端壁部に第1の給電端子接続孔部及び第2の給電端子接続孔部を形成しているから、両モジュールが僅かに分離(両コネクタが僅かに開く)することがあっても、これら第1の給電端子接続孔部及び第2の給電端子接続孔部が離れることはなく、よってこれら第1の給電端子接続孔部及び第2の給電端子接続孔部に接続した電源コネクタの第1の給電端子及び第2の給電端子が開くように変形することがない。又、電源コネクタのアース端子の幅よりも各アース端子挿通孔部の幅が大きいから当該アース端子の変形自体を少なくでき、又、変形したとしても、両コネクタの開きを修正処理してアース端子を再挿入する場合に電源コネクタのアース端子の幅よりも各アース端子挿通孔部の幅が大きいから変形したアース端子の挿入が可能で、且つ上述したように両給電端子も変形しないから、中継コネクタへの電源コネクタの再接続が可能となる。
【0013】
又、請求項3のロボットコントローラにおいては、前記第1のコネクタ及び前記第2のコネクタには、両者間に跨る電気接続部が有り、前記第1のコネクタ及び第2のコネクタのいずれか一方に、少なくとも前記電気接続部部分を覆う庇部を設けたところに特徴を有する。
【0014】
上述したように、両モジュールを過度な力で分離しようとすると、これらが僅かながら開くことがあり、第1のコネクタ及び第2のコネクタも開き気味となる。このとき両コネクタ間に跨る電気接続部が露出するおそれがあるが、上記請求項3によれば、前記庇部でこの電気接続部部分を覆っているから、当該電気接続部が露出することはない。
【図面の簡単な説明】
【0015】
【図1】本発明の第1の実施形態を示す電源コネクタ及び中継コネクタ部分の平面図
【図2】電源コネクタ挿入前のロボットコントローラ全体の斜視図
【図3】中継コネクタを分離した状態での平面図
【図4】電源コネクタ及び中継コネクタの接続前の斜視図
【図5】第2の実施形態を示す図1相当図
【図6】分離状態の中継コネクタと電源コネクタとの斜視図
【図7】電源コネクタ及び中継コネクタの接続前の平面図
【図8】電源コネクタの各端子を正面から見た図
【図9】第1のアース端子挿通孔部部分の縦断正面図
【図10】第2〜第4のアース端子挿通孔部部分の縦断正面図
【図11】アース端子変形状態での再接続状態を示す平面図
【図12】第3の実施形態を示す図1相当図
【図13】中継コネクタを分離した状態での平面図
【図14】中継コネクタを分離した状態での斜視図
【図15】参考例を示す図1相当図
【図16】電源コネクタの平面図
【図17】別の参考例を示す分離状態の中継コネクタと電源コネクタとの斜視図
【発明を実施するための形態】
【0016】
以下、本発明の第1の実施形態について、図1ないし図4を参照して説明する。図2に示す本実施形態のロボットコントローラ1は、電源モジュール2と、これに横並びに結合される他のモジュールとしての例えばCPUモジュール3と、電源コネクタ4と、中継コネクタ5とを備えて構成されている。なお、他のモジュールとしては複数備えても良く、この場合も電源モジュールに対して横並びに順次接合する。
【0017】
前記電源モジュール2は、外部電源(例えばAC200V)を前記電源コネクタ4及び中継コネクタ5を介して得て、この外部電源をCPU用電源に変換してCPUモジュール3に供給し、又、ロボット駆動用電源を生成してロボットに供給する。CPUモジュール3は、ロボットや他の制御モジュールなどを制御する。
【0018】
前記電源モジュール2とCPUモジュール3とは夫々の結合面2aと結合面3aとで結合されるようになっており、この結合によって両モジュール2、3の電気的な接続もなされるようになっている。
【0019】
前記電源モジュール2には、前記結合面2aと前面部2b(図1及び図2参照、前面は電源コネクタ4が接続される側の面をいう)とのコーナー部には、コネクタ配設用凹部2cが形成されている。又、CPUモジュール3には、前記結合面3aと前面部3b(図1及び図2参照)とのコーナー部に、コネクタ配設用凹部3cが形成されている。
【0020】
前記電源コネクタ4は、一側面に第1の給電端子4aと第2の給電端子4bとアース端子4cとを突出して有する。各端子4a〜4cは円柱状をなし、アース端子4cは給電端子4a、4bより太くそして長く形成されている。なお、当該電源コネクタ4の他側面には電源ケーブル4dが接続されている。
【0021】
前記中継コネクタ5は、前記電源モジュール2における前記CPUモジュール3との結合面2aのコネクタ配設用凹部2cに挿入固定される第1のコネクタ6と、前記CPUモジュール3における前記電源モジュール2との結合面3aのコネクタ配設用凹部3cに挿入固定される第2のコネクタ7とから構成されている。
【0022】
前記第1のコネクタ6は、第1の本体部6aと、この第1の本体部6aにおいて前記第2のコネクタ7と対向する一面部6rの中間部位に前記第2のコネクタ7方向へ突出するように形成された第1の凸部6bとを備え、さらにこの第1の凸部6bにはこれの突出方向と直交する方向で当該第1の凸部6bを貫通する第1のアース端子挿通孔部6cが形成され、且つ前記第1の本体部6aの一端部(前端部)に第1の給電端子接続孔部6dが形成されている。
【0023】
又、前記第1のアース端子挿通孔部6c内面には図示しないが接点用導体が設けられており、電源コネクタ4のアース端子4cと電気的に接続されるようになっている。さらに、前記第1の給電端子接続孔部6dの内面には図示しないが接点用導体が設けられており、電源コネクタ4の第1の給電端子4aと電気的に接続されるようになっている。
【0024】
さらに、この第1のコネクタ6の他面部6sには、対電源モジュール用給電ピン8及び対電源モジュール用アースピン9が突設されており、対電源モジュール用給電ピン8は前記第1の給電端子接続孔部6dと電気的に導通されている。又、前記対電源モジュール用アースピン9は第1のアース端子挿通孔部6cと電気的に導通されている。
【0025】
又、この第1のコネクタ6の第1の本体部6aの後部には横方向(第2のコネクタ7と対向する方向)にピン挿通孔部6e(図3参照)が形成されている。
前記第2のコネクタ7は、図3に示すように、第2の本体部7aと、この第2の本体部7aの一端部(前端部)から前記第1のコネクタ6方向へ突出する第2の凸部7bと、当該第2の本体部7aの他端部(後端部)から前記第1のコネクタ6方向へ突出する第3の凸部7cと、この第2の凸部7bと第3の凸部7cとの間に形成された第1の凹部7dとを備え、さらに前記第2の凸部7bにはこれの突出方向と直交する方向で当該第2の凸部7bを貫通する第2のアース端子挿通孔部7eが形成され、前記第3の凸部7cにはこの第2のアース端子挿通孔部7eと対向する第3のアース端子挿通孔部7fが形成され、前記第2の本体部7aの前端部には、第2の給電端子接続孔部7gが形成されている。前記第3のアース端子挿通孔部7fは、前記第3の凸部7cの途中部まで形成されているが、第2のアース端子挿通孔部7eと同様に両端が開通する形態でも良い。前記第2の給電端子接続孔部7gの内面には図示しないが接点用導体が設けられており、電源コネクタ4の第2の給電端子4bと電気的に接続されるようになっている。
【0026】
又、この第2のコネクタ7の前記第3の凸部7cの先端部には対電源モジュール用給電ピン10が突設されており、この対電源モジュール用給電ピン10は前記第2の給電端子接続孔部7gと電気的に導通している。又、この対電源モジュール用給電ピン10は前記第1のコネクタ6のピン挿通孔部6eに挿通されるものである。
【0027】
上記構成において、ロボットコントローラ1を組み立てる場合、電源モジュール2に第1のコネクタ6を組み込んで固定し、CPUモジュール3に第2のコネクタ7を組み込んで固定する。そして、電源モジュール2とCPUモジュール3とを結合する。この場合、第2のコネクタ7の対電源モジュール用給電ピン10が第1のコネクタ6のピン挿通孔部6eを貫通して当該第1のコネクタ6から突出し、又、第1のコネクタ6の第1の凸部6bと第2のコネクタ7の第1の凹部7dとが嵌合し、且つ第2のアース端子挿通孔部7e、第1のアース端子挿通孔部6c及び第3のアース端子挿通孔部7fが一直線に対向し連通する。
【0028】
そして、電源コネクタ4のアース端子4cを上述した一直線状の第2のアース端子挿通孔部7e、第1のアース端子挿通孔部6c及び第3のアース端子挿通孔部7fに挿入すると共に、電源コネクタ4の第1の給電端子4a及び第2の給電端子4bを夫々前記第1の給電端子接続孔部6d及び第2の給電端子接続孔部7gに挿入する。これにより電源コネクタ4の各給電端子4a、4b、アース端子4cが夫々中継コネクタ5の対電源モジュール用給電ピン8、対電源モジュール用給電ピン10、対電源モジュール用アースピン9を介して電源モジュール2に接続され、もって外部電源が電源モジュール2に供給される。
【0029】
この状態においては、電源コネクタ4のアース端子4cが第2のコネクタ7の第2のアース端子挿通孔部7e、第1のコネクタ6の第1のアース端子挿通孔部6c及び第2のコネクタ7の第3のアース端子挿通孔部7fに渡っていることで、このアース端子4cで両コネクタ6、7ひいては両モジュール2、3が連結された状態となっているから、作業者が電源コネクタ4を抜き忘れたままで両モジュール2、3を分離させようとしても、アース端子4cにより、その分離を阻止できる。この結果、電源コネクタ4が電源モジュール2及びCPUモジュール3に接続されたままでこれらモジュール2、3が分離されることがなく、モジュール2、3間の電気接続部分がむき出しになることがない。さらに、既存の電源コネクタ4のアース端子4cをモジュール分離防止に利用できて、新たな部材を設けずに済み、コストの低廉化に寄与できる。
【0030】
図5ないし図11は第2の実施形態を示している。この第2の実施形態は次の点を考慮したものである。前記第1の実施形態において、仮に、不慣れな作業者が、両モジュール2、3を分離しようと無理に大きな外力を加えてしまうと、両モジュール2、3が完全分離することはないものの、両モジュール2、3が図15に示すように、僅かに開き気味となり(図15では判りやすくするために開き角度を大きめに表している)、電気的接続部分の露出はないものの、図16に示すように、電源コネクタ4のアース端子4cが外力を受けて変形すると共に、両給電端子4a、4bが外側へ開くように変形してしまうおそれもある。
【0031】
これでは、電源コネクタ4を引き抜くにも容易には引き抜くのが困難となってしまい、又引き抜き得たとしても、今度は中継コネクタ5に再接続ができない。
そこで、この第2の実施形態では、第1の実施形態と異なる点について説明すると、図6に示すように、前記電源コネクタ4のアース端子4c´を断面矩形状に形成し、前記第1のコネクタ6の第1の本体部6aの一端部(前端部)に、この前端部から前記第2のコネクタ7方向へ突出して当該第2のコネクタ7の一端面(前端面)を覆う端壁部11を形成している。この端壁部11と第1の凸部6bの間に第2の凹部6fが形成される。又、この端壁部11には、第1のアース端子挿通孔部6c´と対向する第4のアース端子挿通孔部12を形成し、さらに第1の給電端子接続孔部6d´及び第2の給電端子接続孔部16を形成し、前記第4のアース端子挿通孔部12、第2のアース端子挿通孔部7e´、第1のアース端子挿通孔部6c´及び第3のアース端子挿通孔部7f´の各幅寸法Ha(図9参照)は、アース端子4c´の幅寸法Hb(図8参照)よりも大きく設定し、これら前記第4のアース端子挿通孔部12、前記第2のアース端子挿通孔部7e´、第1のアース端子挿通孔部6c´及び第3のアース端子挿通孔部7f´のうち、前記電源モジュール2と導通される第1のアース端子挿通孔部6c´の上下内面を、前記電源コネクタ4のアース端子4c´に上下から圧接するばね性を有する平板状の接点用導体6A、6B(図9参照)により構成している。
【0032】
そして、第1の実施形態の対電源モジュール用給電ピン10は、この第2の実施形態では、第1のコネクタ6の他面部6sに設けている(符号を10から10´に変更している)。
【0033】
又、第2の給電端子接続孔部16と上記対電源モジュール給電ピン10´とを導通するために、導電路13が第1のコネクタ6及び第2のコネクタ7に渡って形成されており、この導電路13には、両コネクタ6、7間に跨る電気接続部14、15が設けられている。
【0034】
一方の電気接続部14は、図16に示すように、第1のコネクタ6の端壁部11の背面に設けられた接点用導体14aと前記第1の凸部7bの前面に設けられた接点用導体14bとからなり、いずれも相互に圧接する方向にばね性を有する。他方の電気接続部15は第2のコネクタ7の第2の凸部7bの先端面に設けられた接点15aと、第1のコネクタ6の第1の本体部6aの他端部側の一面部6rに設けられた接点15bとからなり、いずれも相互に圧接する方向にばね性を有する。
【0035】
前記第1のコネクタ6を組み込んだ電源モジュール2と、第2のコネクタ7を組み込んだCPUモジュール3とを結合すると、第1のコネクタ6の第1の凸部6bが第2のコネクタ7の第1の凹部7dに嵌合すると共に、第2の凸部7bが第2の凹部6fに嵌合し、電気接続部14の両接点用導体14a及び14bが圧接して導通し、又電気接続部15の両用導体接点15a及び15bも圧接して導通する。さらに、前記第4のアース端子挿通孔部12、前記第2のアース端子挿通孔部7e´、第1のアース端子挿通孔部6c´及び第3のアース端子挿通孔部7f´が一直線状に対向し連通する。
【0036】
電源モジュール2に電源コネクタ4の電源を接続する場合、電源コネクタ4のアース端子4c´を前記第4のアース端子挿通孔部12、前記第2のアース端子挿通孔部7e´、第1のアース端子挿通孔部6c´及び第3のアース端子挿通孔部7f´に挿入し、前記電源コネクタ4の第1の給電端子4aを前記第1の給電端子接続孔部6´に挿入し、前記電源コネクタ4の第2の給電端子4bを前記第2の給電端子接続孔部16に挿入する。
【0037】
上述した第2の実施形態によれば、まず、第1のコネクタ6の端壁部11に第1の給電端子接続孔部6´及び第2の給電端子接続孔部16を形成しているから、両モジュール2、3が僅かに分離(両コネクタ6、7が僅かに開く)することがあっても、これら第1の給電端子接続孔部6´及び第2の給電端子接続孔部16が離れることはなく、よってこれら第1の給電端子接続孔部6´及び第2の給電端子接続孔部16に接続した電源コネクタ4の第1の給電端子4a及び第2の給電端子4bが開くように変形することがない。
【0038】
又、電源コネクタ4のアース端子4c´の幅よりも各アース端子挿通孔部12、7e´、6c´、7f´の幅が大きいから、当該アース端子4c´の変形自体を少なくでき、又、変形したとしても、この変形状態のアース端子4c´を、両コネクタ6、7に再挿入する場合に、電源コネクタ4のアース端子4c´の幅よりも各アース端子挿通孔部12、7e´、6c´、7f´の幅が大きいから変形したアース端子4c´の挿入が可能で、且つ上述したように両給電端子4a、4bも変形しないから、図11に示すように、中継コネクタ5への電源コネクタ4の再接続が可能となる。
【0039】
なお、図17のように、電源コネクタ4のアース端子4cが円柱状であっても、前記各アース端子挿通孔部12、7e´、6c´、7f´が幅広であれば、アース端子4cが変形しても、上述の第2の実施形態と同様、電源モジュール2の再接続ができるといった効果を得るが、しかし、この場合アース端子4cと上記アース端子挿通孔部6c´との接触箇所が少なく、接続信頼性に劣る。
【0040】
これに対して、この第2の実施形態では、アース端子4c´を断面矩形状として、例えこのアース端子4c´が変形したとしても、上記アース端子挿通孔部6c´との接触面積を広く確保でき、接続信頼性が低下することはない。
【0041】
図12ないし図14には、第3の実施形態を示しており、この実施形態においては、前記第1のコネクタ6及び第2のコネクタ7のうち例えば第1のコネクタ6の上下面に前記一方の電気接続部14部分を覆う庇部21を形成すると共に、他方の電気接続部15部分を覆う庇部22を形成し、さらに庇部23、24を形成し、又、第2のコネクタ7の上下面に庇部21と嵌合する段部21A、庇部22と嵌合する22A、庇部23と嵌合する23A、庇部24と嵌合する24Aを形成した点が第2の実施形態と異なる。
【0042】
既述したように、両モジュール2、3を過度な力で分離しようとすると、これらが僅かながら開くことがあり、第1のコネクタ6及び第2のコネクタ7も開き気味となる。このとき両コネクタ6、7間に跨る電気接続部14、15が露出するおそれがあるが、上記第3の実施形態によれば、庇部21、22で夫々電気接続部14、15部分を覆っているから、当該電気接続部14、15が露出することはない。なお、庇部23、24は、前記庇部21、22と共に、埃などの侵入防止を図ることができる。なおこれら庇部21〜24は第2のコネクタ7に設け、段部21A〜24Aは第1のコネクタ6に設けても良い。
【0043】
なお、本発明の実施形態は上述した各実施形態に限られるものではない。例えば、対電源モジュール用給電ピン8、対電源モジュール用アースピン9、対電源モジュール用給電ピン10、10´の設置部位は第1のコネクタ6及び第2のコネクタ7のいずれに設けても良く、第2のコネクタ7に設けた場合には第1のコネクタ6側へ突出させる構成とすれば良い。又、第1のアース端子挿通孔部6c、6c´、第1の給電端子接続孔部6d、6d´、第2の給電端子接続孔部7g、16から、対電源モジュール用給電ピン8、対電源モジュール用アースピン9、対電源モジュール用給電ピン10、10´への導通路は適宜変更しても良い。又、前記各アース端子挿通孔部12、7e(7e´)、7f(7f´)のいずれか一つ又は全部を対電源モジュール用アースピン9と導通させても良い。
【符号の説明】
【0044】
図面中、1はロボットコントローラ、2は電源モジュール、3はCPUモジュール(他のモジュール)、4は電源コネクタ、4aは第1の給電端子、4bは第2の給電端子、4c、4c´はアース端子、5は中継コネクタ、6は第1のコネクタ、6aは第1の本体部、6bは第1の凸部、6c、6c´は第1のアース端子挿通孔部、6d、6d´は第1の給電端子接続孔部、6fは第2の凹部、6A、6Bは接点用導体、7は第2のコネクタ、7aは第2の本体部、7bは第2の凸部、7cは第3の凸部、7dは第1の凹部、7e、7e´は第2のアース端子挿通孔部、7f、7f´は第3のアース端子挿通孔部、7g、16は第2の給電端子接続孔部、8は対電源モジュール用給電ピン、9は対電源モジュール用アースピン、10、10´は対電源モジュール用給電ピン、11は端壁部、12は第4のアース端子挿通孔部、13は導電路、14、15は電気接続部、16は第2の給電端子接続孔部、21、22は庇部を示す。
【特許請求の範囲】
【請求項1】
電源モジュールと他のモジュールとを結合して構成され、一側面に第1及び第2の給電端子とアース端子と有した電源コネクタから、前記電源モジュールに中継コネクタを介して電源を供給するロボットコントローラであって、
前記中継コネクタは、前記電源モジュールにおける前記他のモジュールとの結合面に固定される第1のコネクタと、前記他のモジュールにおける前記電源モジュールとの結合面に固定される第2のコネクタとから構成され、
前記第1のコネクタは、第1の本体部と、この第1の本体部において前記第2のコネクタと対向する一面部の中間部位に前記第2のコネクタ方向へ突出するように形成された第1の凸部とを備え、さらにこの第1の凸部にはこれの突出方向と直交する方向で当該第1の凸部を貫通する第1のアース端子挿通孔部が形成され、且つ前記第1の本体部の一端部に第1の給電端子接続孔部が形成され、
前記第2のコネクタは、第2の本体部と、この第2の本体部の一端部から前記第1のコネクタ方向へ突出する第2の凸部と、当該第2の本体部の他端部から前記第1のコネクタ方向へ突出する第3の凸部と、この第2の凸部と第3の凸部との間に形成された第1の凹部とを備え、さらに前記第2の凸部にはこれの突出方向と直交する方向で当該第2の凸部を貫通する第2のアース端子挿通孔部が形成され、前記第3の凸部にはこの第2のアース端子挿通孔部と対向する第3のアース端子挿通孔部が形成され、前記第2の本体部の一端部には、第2の給電端子接続孔部が形成され、
当該第2のコネクタと前記第1のコネクタとの結合時に前記第1の凹部と前記第1の凸部とが嵌合し、且つ前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部が一直線に連通する構成であり、
前記電源コネクタのアース端子を前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部に挿入し、前記電源コネクタの第1の給電端子を前記第1の給電端子接続孔部に挿入し、前記電源コネクタの第2の給電端子を前記第2の給電端子接続孔部に挿入する構成としたことを特徴とするロボットコントローラ。
【請求項2】
電源モジュールと他のモジュールとを結合して構成され、一側面に第1及び第2の給電端子とアース端子と有した電源コネクタから、前記電源モジュールに中継コネクタを介して電源を供給するロボットコントローラであって、
前記電源コネクタのアース端子を断面矩形状に形成し、
前記中継コネクタは、前記電源モジュールにおける前記他のモジュールとの結合面に固定される第1のコネクタと、前記他のモジュールにおける前記電源モジュールとの結合面に固定される第2のコネクタとから構成され、
前記第1のコネクタは、第1の本体部と、この第1の本体部において前記第2のコネクタと対向する一面部の中間部位に前記第2のコネクタ方向へ突出するように形成された第1の凸部と、前記第1の本体の一端部から前記第2のコネクタ方向へ突出して当該第2のコネクタの一端面を覆う端壁部とを備え、さらに前記第1の凸部にはこれの突出方向と直交する方向で当該第1の凸部を貫通する第1のアース端子挿通孔部が形成され、且つ前記端壁部には、当該第1のアース端子挿通孔部と対向する第4のアース端子挿通孔部が形成されると共に、第1の給電端子接続孔部及び第2の給電端子接続孔部が形成され、
前記第2のコネクタは、第2の本体部と、この第2の本体部の一端部から前記第1のコネクタ方向へ突出する第2の凸部と、当該第2の本体部の他端部から前記第1のコネクタ方向へ突出する第3の凸部と、この第2の凸部と第3の凸部との間に形成された第1の凹部とを備え、さらに前記第2の凸部にはこれの突出方向と直交する方向で当該第2の凸部を貫通する第2のアース端子挿通孔部が形成され、前記第3の凸部にはこの第2のアース端子挿通孔部と対向する第3のアース端子挿通孔部が形成され、
前記第4のアース端子挿通孔部、前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部の各幅寸法は、前記アース端子の幅寸法よりも大きく設定し、これら前記第4のアース端子挿通孔部、前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部のうち、前記電源モジュールと導通されるアース端子挿通孔部はその上下内面が前記電源コネクタのアース端子に上下から圧接する接点用導体により構成され、
当該第2のコネクタと前記第1のコネクタとの結合時に前記第1の凹部と前記第1の凸部とが嵌合し、且つ前記第4のアース端子挿通孔部、前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部が一直線に連通する構成であり、
前記電源コネクタのアース端子を前記第4のアース端子挿通孔部、前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部に挿入し、前記電源コネクタの第1の給電端子を前記第1の給電端子接続孔部に挿入し、前記電源コネクタの第2の給電端子を前記第2の給電端子接続孔部に挿入する構成としたことを特徴とするロボットコントローラ。
【請求項3】
前記第1のコネクタ及び前記第2のコネクタには、両者間に跨る電気接続部が有り、
前記第1のコネクタ及び第2のコネクタのいずれか一方に、少なくとも前記電気接続部部分を覆う庇部を設けたことを特徴とする請求項1又は2にロボットコントローラ。
【請求項1】
電源モジュールと他のモジュールとを結合して構成され、一側面に第1及び第2の給電端子とアース端子と有した電源コネクタから、前記電源モジュールに中継コネクタを介して電源を供給するロボットコントローラであって、
前記中継コネクタは、前記電源モジュールにおける前記他のモジュールとの結合面に固定される第1のコネクタと、前記他のモジュールにおける前記電源モジュールとの結合面に固定される第2のコネクタとから構成され、
前記第1のコネクタは、第1の本体部と、この第1の本体部において前記第2のコネクタと対向する一面部の中間部位に前記第2のコネクタ方向へ突出するように形成された第1の凸部とを備え、さらにこの第1の凸部にはこれの突出方向と直交する方向で当該第1の凸部を貫通する第1のアース端子挿通孔部が形成され、且つ前記第1の本体部の一端部に第1の給電端子接続孔部が形成され、
前記第2のコネクタは、第2の本体部と、この第2の本体部の一端部から前記第1のコネクタ方向へ突出する第2の凸部と、当該第2の本体部の他端部から前記第1のコネクタ方向へ突出する第3の凸部と、この第2の凸部と第3の凸部との間に形成された第1の凹部とを備え、さらに前記第2の凸部にはこれの突出方向と直交する方向で当該第2の凸部を貫通する第2のアース端子挿通孔部が形成され、前記第3の凸部にはこの第2のアース端子挿通孔部と対向する第3のアース端子挿通孔部が形成され、前記第2の本体部の一端部には、第2の給電端子接続孔部が形成され、
当該第2のコネクタと前記第1のコネクタとの結合時に前記第1の凹部と前記第1の凸部とが嵌合し、且つ前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部が一直線に連通する構成であり、
前記電源コネクタのアース端子を前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部に挿入し、前記電源コネクタの第1の給電端子を前記第1の給電端子接続孔部に挿入し、前記電源コネクタの第2の給電端子を前記第2の給電端子接続孔部に挿入する構成としたことを特徴とするロボットコントローラ。
【請求項2】
電源モジュールと他のモジュールとを結合して構成され、一側面に第1及び第2の給電端子とアース端子と有した電源コネクタから、前記電源モジュールに中継コネクタを介して電源を供給するロボットコントローラであって、
前記電源コネクタのアース端子を断面矩形状に形成し、
前記中継コネクタは、前記電源モジュールにおける前記他のモジュールとの結合面に固定される第1のコネクタと、前記他のモジュールにおける前記電源モジュールとの結合面に固定される第2のコネクタとから構成され、
前記第1のコネクタは、第1の本体部と、この第1の本体部において前記第2のコネクタと対向する一面部の中間部位に前記第2のコネクタ方向へ突出するように形成された第1の凸部と、前記第1の本体の一端部から前記第2のコネクタ方向へ突出して当該第2のコネクタの一端面を覆う端壁部とを備え、さらに前記第1の凸部にはこれの突出方向と直交する方向で当該第1の凸部を貫通する第1のアース端子挿通孔部が形成され、且つ前記端壁部には、当該第1のアース端子挿通孔部と対向する第4のアース端子挿通孔部が形成されると共に、第1の給電端子接続孔部及び第2の給電端子接続孔部が形成され、
前記第2のコネクタは、第2の本体部と、この第2の本体部の一端部から前記第1のコネクタ方向へ突出する第2の凸部と、当該第2の本体部の他端部から前記第1のコネクタ方向へ突出する第3の凸部と、この第2の凸部と第3の凸部との間に形成された第1の凹部とを備え、さらに前記第2の凸部にはこれの突出方向と直交する方向で当該第2の凸部を貫通する第2のアース端子挿通孔部が形成され、前記第3の凸部にはこの第2のアース端子挿通孔部と対向する第3のアース端子挿通孔部が形成され、
前記第4のアース端子挿通孔部、前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部の各幅寸法は、前記アース端子の幅寸法よりも大きく設定し、これら前記第4のアース端子挿通孔部、前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部のうち、前記電源モジュールと導通されるアース端子挿通孔部はその上下内面が前記電源コネクタのアース端子に上下から圧接する接点用導体により構成され、
当該第2のコネクタと前記第1のコネクタとの結合時に前記第1の凹部と前記第1の凸部とが嵌合し、且つ前記第4のアース端子挿通孔部、前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部が一直線に連通する構成であり、
前記電源コネクタのアース端子を前記第4のアース端子挿通孔部、前記第2のアース端子挿通孔部、第1のアース端子挿通孔部及び第3のアース端子挿通孔部に挿入し、前記電源コネクタの第1の給電端子を前記第1の給電端子接続孔部に挿入し、前記電源コネクタの第2の給電端子を前記第2の給電端子接続孔部に挿入する構成としたことを特徴とするロボットコントローラ。
【請求項3】
前記第1のコネクタ及び前記第2のコネクタには、両者間に跨る電気接続部が有り、
前記第1のコネクタ及び第2のコネクタのいずれか一方に、少なくとも前記電気接続部部分を覆う庇部を設けたことを特徴とする請求項1又は2にロボットコントローラ。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】

【図10】
【図11】
【図12】

【図13】
【図14】
【図15】

【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−195203(P2012−195203A)
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願番号】特願2011−59178(P2011−59178)
【出願日】平成23年3月17日(2011.3.17)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願日】平成23年3月17日(2011.3.17)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
[ Back to top ]