
平行二輪車の車両状態表示装置及び方法
【課題】車両に関する状態を外部に向けて表示する手段において、平行二輪車特有の問題を解決する。
【解決手段】本発明は、車両に関する状態を検出する車両状態検出手段2と、前記車両状態検出手段2により検出された情報を外部に知らせる表示手段3とを有する平行二輪車の車両状態表示装置1であって、前記車両状態検出手段2は、車両の速度と加速度との関係に基づいて、少なくとも減速状態を含む走行状態を検出する走行状態検出手段5を有するものである。また、前記走行状態検出手段5は、前記速度が正であり、且つ前記加速度が負である場合に、減速状態であると判定する。
【解決手段】本発明は、車両に関する状態を検出する車両状態検出手段2と、前記車両状態検出手段2により検出された情報を外部に知らせる表示手段3とを有する平行二輪車の車両状態表示装置1であって、前記車両状態検出手段2は、車両の速度と加速度との関係に基づいて、少なくとも減速状態を含む走行状態を検出する走行状態検出手段5を有するものである。また、前記走行状態検出手段5は、前記速度が正であり、且つ前記加速度が負である場合に、減速状態であると判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、平行二輪車に関し、特に走行状態等の車両状態を外部に知らせるための技術に関するものである。
【背景技術】
【0002】
近年、同軸上に平行に配置された2つの車輪を備えて構成される平行二輪車の開発が進められている。自動車やバイク等の車両においては、例えば減速、後進等の走行状態を外部に知らせるための表示装置(代表的なものとしてブレーキランプ、バックランプ等)が備えられているが、このような表示装置は、平行二輪車にも備えられるべきものである。
【0003】
特許文献1において、上記のような表示装置を備える平行二輪車(車両装置)が開示されている。この特許文献1に係る平行二輪車は、車体の走行状態又は走行に関連した状態を検出する状態検出手段と、前記状態検出手段により検出される前記車体の走行状態又は走行関連状態を表示する表示手段とを備えるものである。これにより、車両の走行状態や走行関連状態を、運転者自身が認識できると共に、周囲の歩行者等に知らせることができるようになる。
【特許文献1】特開2005−335570号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、平行二輪車においては、自動車等の通常の車両に比べて、その走行状態を正確に検出することが難しいという問題がある。なぜなら、平行二輪車には、通常の車両に備えられるブレーキ、アクセル等に相当する機構がない場合が多く、単純にこれらの機構への操作の検知に基づいて、走行状態を判定することができないからである。また、平行二輪車においては、自動車等の通常の車両にはない監視すべき特有の車両状態、例えば倒立状の姿勢を安定させるための姿勢制御の実行状態、搭乗者の足部と搭乗部との接触状態等が存在し、このような状態も、外部(搭乗者本人を含む)に適切に知らせ得る手段が必要である。
【0005】
そこで、本発明は、車両に関する状態を外部に向けて表示する手段において、平行二輪車特有の問題を解決することを目的とする。
【課題を解決するための手段】
【0006】
上記課題の解決を図る本発明は、車両に関する状態を検出する車両状態検出手段と、前記車両状態検出手段により検出された情報を外部に知らせるための表示を行う表示手段とを有する平行二輪車の車両状態表示装置であって、前記車両状態検出手段は、車両の速度と加速度との関係に基づいて、少なくとも減速状態を含む走行状態を検出する走行状態検出手段を有するものである。
【0007】
このように、ブレーキペダル等がない平行二輪車においても、走行中の速度と加速度との関係を分析することにより、車両の減速状態を含む各種走行状態を検出することができる。そして、検出された走行状態を、例えば車体に設けられたランプ等の表示手段により、周囲の人や搭乗者本人に知らせることが可能となる。
【0008】
また、前記走行状態検出手段は、前記速度が正であり、且つ前記加速度が負である場合に、減速状態であると判定することが好ましい。
【0009】
また、前記走行状態検出手段は、車両の速度の時間的変化を検出する速度検出手段と、前記速度検出手段により検出された速度に基づいて、加速度の時間的変化を検出する加速度検出手段と、前記加速度検出手段により検出された加速度に対し、ノイズを除去するためのフィルタ処理を施すフィルタ手段と、前記フィルタ処理後の加速度と、前記速度検出手段により検出された速度との時間的ずれを補正する補正手段とを有することが好ましい。
【0010】
速度や加速度は、例えば車輪や駆動モータに設けられた回転計等の装置により得られる計測値から求めることができるが、このような計測値、又は計測値から得られる計算値には、ノイズが含まれる場合がある。そこで、このようなノイズを除去するために、速度から算出された加速度に対し、フィルタ処理を施すことが有効であるが、このフィルタ処理により、速度の時間軸に対して加速度が遅延を生じてしまう場合がある。そこで、この遅延を補正する処理を施すことにより、速度と加速度との関係を正確に把握することができ、車両の走行状態を正確に検出することが可能となる。
【0011】
具体的には、前記補正手段は、前記フィルタ処理後の加速度が、k>0を満たす閾値k以下になった時に、前記減速状態に入ったと判定することが好ましい。
【0012】
理論的には、速度が正であり、加速度が0未満になった時に、減速状態に入ったと判定されるが、上述したように、フィルタ処理による加速度の遅延を考慮すると、加速度が0よりも大きいkに達した時点で、減速状態に入ったと判定することがよい。これにより、フィルタ処理による加速度の遅延が吸収され、減速状態を正確に検出することができる。
【0013】
また、前記表示手段は、前記減速状態を表示する減速状態表示部を有するべきである。
【0014】
また、前記走行状態検出手段は、前記速度が負である場合に後進状態であると判定し、前記表示手段は、車両が前記後進状態にあることを表示する後進状態表示部を有することが好ましい。
【0015】
このように、後進状態を外部に知らせることにより、前記減速状態と同様に、安全性を向上させることができる。
【0016】
また、前記表示手段は、前記速度の高低に対応する表示を行う速度状態表示部を有することが好ましい。
【0017】
このように、車両の走行速度を外部に知らせることによっても、安全性を向上させることができる。
【0018】
また、本発明は、車両に関する状態を検出する車両状態検出手段と、前記車両状態検出手段により検出された情報を外部に知らせる表示手段とを有する平行二輪車の車両状態表示装置であって、前記車両状態検出手段は、電源の残量を検出する電源状態検出手段を有し、前記表示手段は、前記電源の残量を示す表示を行う電源残量表示部を有するものである。
【0019】
このように、電源残量を外部、特に搭乗者に知らせることにより、バッテリ切れによる不意な停車を防ぐことができ、安全性を向上させることができる。
【0020】
また、本発明は、車両に関する状態を検出する車両状態検出手段と、前記車両状態検出手段により検出された情報を外部に知らせる表示手段とを有する平行二輪車の車両状態表示装置であって、前記車両状態検出手段は、車両に設けられた搭乗部と搭乗者の足部との接触状態を検出する搭乗状態検出手段を有し、前記表示手段は、前記接触状態を示す表示を行う足接触状態表示部を有するものである。
【0021】
このように、搭乗者の足が所定の場所に正しく接触しているか否かを、特に搭乗者本人に知らせることにより、適切な操作が可能となり、安全性を向上させることができる。
【0022】
また、本発明は、車両に関する状態を検出する車両状態検出手段と、前記車両状態検出手段により検出された情報を外部に知らせる表示手段とを有する平行二輪車の車両状態表示装置であって、前記車両状態検出手段は、車両の姿勢を安定させる姿勢制御が実行可能か否かを検出する制御状態検出手段を有し、前記表示手段は、前記制御状態検出手段による検出結果を表示する制御状態表示部を有するものである。
【0023】
このように、特に搭乗者本人に対し、車両の現在の制御状態を知らせることにより、適切な操作が可能となり、安全性を向上させることができる。
【0024】
また、前記制御状態検出手段は、車両に設けられた搭乗部と搭乗者の足部との接触状態と、車両の姿勢とに基づいて、前記姿勢制御が実行可能か否かを判定することが好ましい。
【0025】
このように、制御可能な状態か否かは、搭乗者の足の接触状態と、車両の姿勢とに基づいて、正しく判定することができる。
【0026】
また、本発明は、上記平行二輪車の車両状態表示装置に対応する方法の発明である。この平行二輪車の車両状態表示方法に係る作用効果は、上記装置に係るものと同様である。
【発明の効果】
【0027】
上記本発明によれば、車両に関する状態を外部に向けて表示する手段において、平行二輪車特有の問題を解決することができる。
【発明を実施するための最良の形態】
【0028】
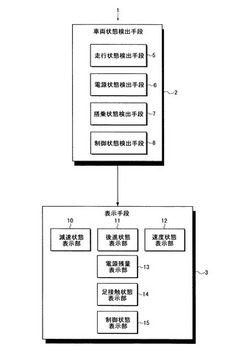
以下に、本発明の実施の形態を、添付した図面を参照して説明する。図1において、本実施の形態に係る平行二輪車の車両状態表示装置(以下、本装置と略記する)1の基本的な構成が示されている。本装置1は、車両(平行二輪車)に関する状態を検出する車両状態検出手段2と、前記車両状態検出手段2により検出された情報を外部に知らせる表示手段3とを有する。
【0029】
本実施の形態に係る前記車両状態検出手段2は、走行状態検出手段5、電源状態検出手段6、搭乗状態検出手段7、及び制御状態検出手段8を有する。
【0030】
前記走行状態検出手段5は、車両の速度と加速度との関係に基づいて、各種走行状態を検出するものであり、例えば速度が正であり、且つ加速度が負である場合に、車両が減速状態にあると判定するものである。前記電源状態検出手段6は、車両に搭載される電源の残量を検出するものである。前記搭乗状態検出手段7は、車両に設けられた搭乗部と搭乗者の足部との接触状態を検出するものである。前記制御状態検出手段8は、車両の姿勢を安定させる姿勢制御が実行可能か否かを検出するものである。
【0031】
本実施例に係る前記表示手段3は、減速状態表示部10、後進状態表示部11、速度状態表示部12、電源残量表示部13、足接触状態表示部14、及び制御状態表示部15を有する。
【0032】
前記減速状態表示部10は、前記走行状態検出手段5により、車両が減速状態にあると判定された場合に、車両が減速状態であることを外部(周囲にいる人や搭乗者本人)に知らせるための表示を行うものである。前記後進状態表示部10は、前記走行状態検出手段5により、車両が後進状態にあると判定された場合に、車両が後進状態であることを外部に知らせるための表示を行うものである。前記速度状態表示部12は、前記走行状態検出手段5により検出された速度情報に基づいて、速度の高低に対応する表示を外部に対して行うものである。前記電源残量表示部14は、前記電源状態検出手段6により検出された電源残量を、外部に対して表示するものである。前記足接触状態表示部14は、前記搭乗状態検出手段7により検出された搭乗部と搭乗者の脚部との接触状態を、外部に対して表示するものである。前記制御状態表示部15は、前記制御状態検出手段8により検出された前記姿勢制御の実行可能か否かに関する情報を、外部に対して表示するものである。
【0033】
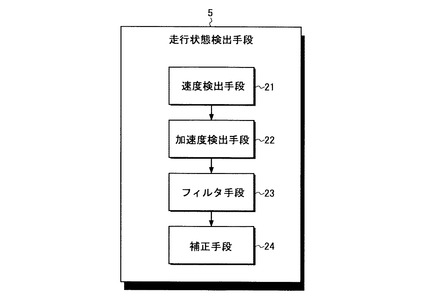
また、前記走行状態検出手段5は、図2に示すように、速度検出手段21、加速度検出手段22、フィルタ手段23、及び補正手段24を有する。
【0034】
前記速度検出手段21は、車両の速度の時間的変化を検出するものであり、周知の回転計等の計測装置、CPU、記憶装置(ROM、RAM等)、所定のプログラム等の協働により構成することができる。
【0035】
前記加速度検出手段22は、前記速度検出手段21により検出された速度に基づいて、加速度の時間的変化を検出するものであり、CPU、記憶装置、所定のプログラム等の協働により構成することができる。
【0036】
前記フィルタ手段23は、前記加速度検出手段22により検出された加速度に対し、ノイズを除去するためのフィルタ処理を施すものであり、周知のLPF(low-pass filter)回路、CPU、記憶装置、所定のプログラム等の協働により構成することができる。
【0037】
前記補正手段24は、前記フィルタ処理後の加速度と、前記速度検出手段21により検出された速度との時間的ずれを補正するものであり、CPU、記憶装置、所定のプログラム等の協働により構成することができる。
【0038】
上記構成を有する本装置1によれば、ブレーキペダル等がない平行二輪車においても、走行中の速度と加速度との関係を分析することにより、車両の減速状態を含む各種走行状態を検出することができる。そして、検出された走行状態を、例えば車体に設けられたランプ等の表示手段により、周囲の人や搭乗者本人に知らせることが可能となる。
【0039】
また、計測や計算により得られる速度や加速度には、ノイズが含まれる場合があるが、前記走行状態検出手段5によれば、前記フィルタ手段23によりノイズが除去されると共に、前記補正手段24により、前記フィルタ処理に伴って発生する時間的ずれが補正されるので、前記減速状態等の検出を正確に行うことが可能となる。
【0040】
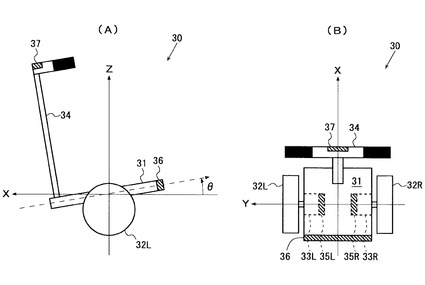
以下に、上記本装置1を適用した具体的構成例を、図3〜図13により説明する。図3(A),(B)において、本装置1が適用される平行二輪車30の概略的な構成が示されている。この平行二輪車30は、搭乗者が乗る搭乗部31に対し、同軸上に平行に車輪32L,32Rが配置され、それぞれの車輪32L,32Rに対して独立して駆動力を発生させる電動モータ等からなる駆動装置33L,33Rを有する。前記搭乗部31には、搭乗者の状態(搭乗部31と搭乗者の足部との接触状態)を検出する各種センサ又はスイッチが配置され、搭乗者が操作時に把持するハンドル34が立設されている。また、前記駆動装置33L,33Rのそれぞれには、車輪32L,32Rの回転速度及び回転方向を検出可能な回転計35L,35Rが設置されている。更に、前記搭乗部31の後端部にはランプ36が設置され、前記ハンドル34の上端部には表示パネル37が設置されている。また、図3(A),(B)において、この平行二輪車30に対応する座標系が示されており、車軸に対して垂直方向をX軸、車軸方向をY軸、鉛直方向をZ軸、車軸周りの角度をピッチ軸角度θとする。
【0041】
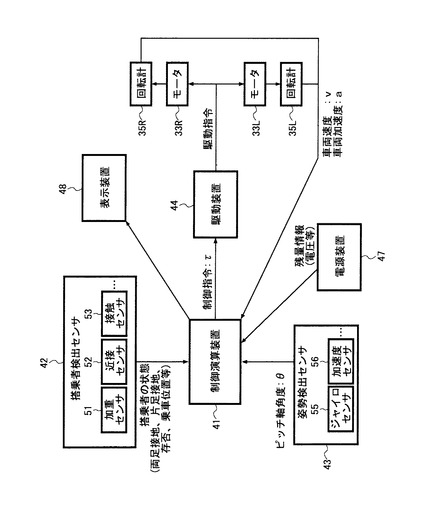
図4において、前記平行二輪車30の具体的な構成が示されている。この平行二輪車30は、制御演算装置41、搭乗者検出センサ42、姿勢検出センサ43、駆動装置44、モータ33L,33R、回転計35L,35R、電源装置47、表示装置48を有している。
【0042】
前記制御演算装置41は、CPU、記憶装置(ROM,RAM等)、所定のプログラム等の協働により構成され、後述する搭乗者検出センサ42及び姿勢検出センサ43からの検出信号、前記モータ33L,33Rからのフィードバック信号等に基づいて、前記駆動装置44に対する制御指令τを生成し出力する。アクチュエータ等からなる駆動装置44は、前記制御指令τを受けて所定の駆動トルクを生成し、これを駆動指令としてそれぞれのモータ33L,33Rに供給する。これにより、平行二輪車30の姿勢制御が実行される。尚、前記制御指令τの生成方法については、説明を省略する(例えば、特開2007−331443号公報等を参照)。また、本実施の形態に係る制御演算装置41は、前記回転計35L,35Rからの検出信号、前記搭乗者検出センサ42からの検出信号、前記姿勢検出センサ43からの検出信号、前記電源装置47からの電圧値信号等に基づいて、各種車両状態を示す信号を生成し、前記表示装置48に出力する。この点については後に詳述する。
【0043】
前記搭乗者検出センサ42は、前記搭乗部31と搭乗者の足部との接触状態を検出するための複数のセンサ群であり、例えば加重センサ51、近接センサ52、接触センサ53等から構成される。これらのセンサ51,52,53による検出結果は、前記制御演算装置41に出力され、搭乗者の両足が搭乗部31に接触しているか、片足のみ接触しているか、搭乗者が搭乗部31上に存在しているか、搭乗部31上のどの位置に乗っているか等の判定に用いられる。尚、これらのセンサ51,52,53としては、周知の構成及び作用効果を有するものを適宜選択して用いることができる。
【0044】
前記姿勢検出センサ43は、前記平行二輪車30の姿勢を検出するための複数のセンサ群であり、例えばジャイロセンサ55,加速度センサ56等から構成される。これらのセンサ55,56による検出結果は、前記制御演算装置41に出力され、前記姿勢制御に用いられるピッチ軸角度θやピッチ軸角速度ωの算出に用いられる。尚、これらのセンサ55,56としては、周知の構成及び作用効果を有するものを適宜選択して用いることができる。
【0045】
前記回転計35L,35Rは、前記モータ33L,33Rの回転速度及び回転方向を検出するものであり、この検出結果は、前記制御演算装置41に出力され、車両速度v、車両加速度a、及び車両の進行方向の検出に用いられる。この回転計35L,35Rとしては、周知の構成及び作用効果を有するのもを適宜選択して用いることができる。
【0046】
前記電源装置47は、当該平行二輪車30の各構成要素に駆動電力を供給するものであり、周知の充電式バッテリ等から構成されるものである。この電源装置47が発生させる電圧等に関する情報は、前記制御演算装置41に出力され、バッテリの残量情報の生成に用いられる。
【0047】
前記表示装置48は、前記ランプ36、前記表示パネル37等から構成され、前記制御演算装置41により検出された各種車両状態を、外部に知らせるものである。
【0048】
図5〜図7において、速度vと加速度aとの関係に基づいて、平行二輪車30の走行状態を検出する方法について説明する。図5及び図6において、破線は速度vを示し、実線は加速度aを示している。図5において、速度vが正の値である区間(v>0)は、車両が前進走行を行っており、速度vが負の値である区間(v<0)は、車両が後進走行を行っていることを示している。また、加速度aが正の値である区間(a>0)は、車両は加速状態であり、加速度aが負の値である区間(a<0)は、車両は減速状態であることを示している。特に、図6に示すように、速度vが正であり、且つ加速度aが負である区間S(v>0,a<0)は、車両は前進走行中に減速した状態であり、自動車やバイク等の車両においては、ブレーキランプが点灯する状態であることを示している。
【0049】
図7において、上記のように検出された走行状態を、前記表示装置48に表示させる際の制御フローが示されている。先ず、前記回転計35L,35Rにより所定の単位時間周期毎の速度vを取得してメモリに蓄積していき、この蓄積された速度情報に基づいて、速度vと同一の時間軸で対応する加速度aの変化を算出する(S101)。加速度aは、例えば下記式(1)により算出することができる。
a=(vnow−vold)/dt …(1)
尚、vnowは計測時点での車両速度であり、voldは、一単位時間周期前の車両速度であり、dtは単位時間周期を示す。
【0050】
次いで、速度vが正の値であるか否かを判定し(S102)、正ではないと判定された場合(N:v<0)には、車両は後進走行状態にあると判定し(S103)、前記表示装置48により、後進走行中であることを示す表示、即ち通常の自動車等におけるバックランプに相当する表示を行う(S104)。一方、前記ステップS102において、速度vが正の値であると判定された場合(Y)には、次いで加速度aが正の値であるか否かを判定する(S105)。
【0051】
前記ステップS105において、加速度aが正ではないと判定された場合(N:v>0,a<0)には、車両は前進走行中の減速状態であると判定し(S106)、減速状態であることを示す表示、即ち通常の自動車等におけるブレーキランプに相当する表示を行う(S107)。一方、前記ステップS105において、加速度aが正であると判定された場合(Y:v>0,a>0)には、車両は前進走行中の加速状態であると判定し(S108)、何も表示しない。
【0052】
次に、図8及び図9において、加速度aに対してフィルタ処理を行うと共に、このフィルタ処理により生ずる時間的ずれを補正する処理について説明する。図8(A)に示すように、回転計35L,35Rにより計測された速度vに基づいて算出された加速度aには、ノイズ(高周波成分)が含まれる場合がある。図8(B)において、ノイズを含んだ加速度aに対してLPF回路等を用いてフィルタ処理を施したフィルタ後加速度faが示されている。このフィルタ後加速度faは、不要な高周波成分が除去されて滑らかな波形となると共に、元の加速度aの波形から所定時間遅延したものとなる。このため、フィルタ後加速度faは、速度vとの間で時間的な対応が取れていない状態となる。
【0053】
そこで、図9に示すように、フィルタ後加速度faが0より大きい閾値kに達した時点で、前方進行中の減速状態を示す区間Sに入ったものと判定することにより、前記フィルタ処理による遅延を解消することができる。
【0054】
図10において、上記のようなフィルタ処理及び補正処理を施した場合の制御フローが示されている。先ず、前記回転計35L,35Rにより所定の単位時間周期毎の速度vを取得してメモリに蓄積していき、この蓄積された速度情報に基づいて、速度vと同一の時間軸で対応する加速度aの変化を算出する(S201)。次いで、この加速度aに対して、ノイズを除去するためのフィルタ処理を施し、フィルタ後加速度faを生成する(S202)。
【0055】
次いで、速度vが正の値であるか否かを判定し(S203)、正ではないと判定された場合(N:v<0)には、車両は後進走行状態にあると判定し(S204)、前記表示装置48により、後進走行中であることを示す表示、即ち通常の自動車等におけるバックランプに相当する表示を行う(S205)。一方、前記ステップS203において、速度vが正の値であると判定された場合(Y)には、次いでフィルタ後加速度faが閾値k(k>0)以下であるか否かを判定する(S206)。
【0056】
前記ステップS206において、フィルタ後加速度faが閾値k以下であると判定された場合(Y:v>0,fa≦k)には、車両は前進走行中の減速状態であると判定し(S207)、減速状態であることを示す表示、即ち通常の自動車等におけるブレーキランプに相当する表示を行う(S208)。一方、前記ステップS206において、フィルタ後加速度faがk以下ではないと判定された場合(N:v>0,fa≧k)には、車両は前進走行中の加速状態であると判定し(S209)、何も表示しない。
【0057】
次に、図11において、速度vの高低に応じた表示を行う際の制御について説明する。先ず、前記回転計46L,46Rにより速度vを検出し(S301)、この速度vが予め設定された速度v_lowよりも大きいか否かが判定され(S302)、v_lowよりも大きくないと判定された場合(N)には、前記表示パネル37(図3参照)やその他の表示装置に、速度vが速度v_low以下であることを表示する(S303)。
【0058】
一方、前記ステップS302において、速度vが速度v_lowよりも大きいと判定された場合(Y)には、次いで速度vが、速度v_midよりも大きいか否かが判定される(S304)。尚、v_mid>v_lowの関係が存する。前記ステップS304において、速度vが速度v_midよりも大きくないと判定された場合(N)には、前記表示パネル37等に速度vが速度v_low以上であることを表示する(S305)。
【0059】
一方、前記ステップS304において、速度vが速度v_midよりも大きいと判定された場合(Y)には、次いで速度vが、速度v_hiよりも大きいか否かが判定される(S306)。尚、v_hi>v_midの関係が存する。前記ステップS306において、速度vが速度v_hiよりも大きくないと判定された場合(N)には、前記表示パネル37等に速度vが速度v_mid以上であることを表示する(S307)。
【0060】
一方、前記ステップS306において、速度vが速度v_hiよりも大きいと判定された場合(N)には、次いで速度vが、速度v_limitよりも大きいか否かが判定される(S308)。尚、v_limit>v_hiの関係が存する。前記ステップS308において、速度vが速度v_limitよりも大きくないと判定された場合(N)には、前記表示パネル37等に速度vが速度v_hi以上であることを表示する(S309)。
【0061】
一方、前記ステップS308において、速度vが速度v_limitよりも大きいと判定された場合(Y)には、前記表示パネル37等に速度vが速度v_limit以上であることを表示する(S310)
【0062】
このように、車両の走行速度を搭乗者本人や周囲の人に知らせることによって、安全性を向上させることができる。
【0063】
次に、図12において、電源残量Bat_nowを表示する際の制御について説明する。先ず、前記電源装置47が発生する電圧を監視することにより、電源残量Bat_nowを検出し(S401)、この電源残量Bat_nowが予め設定された電源残量Bat_emptよりも大きいか否かが判定され(S402)、Bat_emptよりも大きくないと判定された場合(N)には、前記表示パネル37等に、電源残量が略空状態であることを表示する(S403)。
【0064】
一方、前記ステップS402において、電源残量Bat_nowが電源残量Bat_emptよりも大きいと判定された場合(Y)には、次いで電源残量Bat_nowが、電源残量Bat_lowよりも大きいか否かが判定される(S404)。尚、Bat_empt>Bat_lowの関係が存する。前記ステップS404において、電源残量Bat_nowが電源残量Bat_lowよりも大きくないと判定された場合(N)には、前記表示パネル37等に電源残量Bat_nowが電源残量Bat_lowからBat_emptの間であることを表示する(S405)。
【0065】
一方、前記ステップS404において、電源残量Bat_nowが電源残量Bat_lowよりも大きいと判定された場合(Y)には、次いで電源残量Bat_nowが、電源残量Bat_midよりも大きいか否かが判定される(S406)。尚、Bat_mid>Bat_lowの関係が存する。前記ステップS406において、電源残量Bat_nowが電源残量Bat_midよりも大きくないと判定された場合(N)には、前記表示パネル37等に電源残量Bat_nowが電源残量Bat_low以上であることを表示する(S407)。
【0066】
一方、前記ステップS406において、電源残量Bat_nowが電源残量Bat_midよりも大きいと判定された場合(N)には、次いで電源残量Bat_nowが、電源残量Bat_hiよりも大きいか否かが判定される(S408)。尚、Bat_hi>Bat_midの関係が存する。前記ステップS408において、Bat_nowが電源残量Bat_hiよりも大きくないと判定された場合(N)には、前記表示パネル37等に電源残量Bat_nowが電源残量Bat_mid以上であることを表示する(S409)。
【0067】
一方、前記ステップS408において、電源残量Bat_nowが電源残量Bat_hiよりも大きいと判定された場合(N)には、次いで電源残量Bat_nowが、電源残量Bat_fullよりも大きいか否かが判定される(S410)。尚、Bat_full>Bat_hiの関係が存する。前記ステップS410において、Bat_nowが電源残量Bat_fullよりも大きくないと判定された場合(N)には、前記表示パネル37等に電源残量Bat_nowが電源残量Bat_hi以上であることを表示する(S411)。
【0068】
一方、前記ステップS410において、電源残量Bat_nowが電源残量Bat_fullよりも大きいと判定された場合(Y)には、前記表示パネル37等に満充電状態であることを表示する(S412)。
【0069】
このように、電源残量を搭乗者本人や周囲の人に知らせることによって、バッテリ切れによる不意な停車を防ぐことができ、安全性を向上させることができる。
【0070】
次に、図13において、搭乗者の搭乗状態及び平行二輪車30の制御状態を表示する際の制御について説明する。先ず、電源が投入されると、前記表示パネル37等に、通電状態であることを示す乗車状態1が表示され(S501)、次いで前記搭乗者検出センサ42により、
前記搭乗部31に搭乗者の片足が接触しているか否かが判定され(S502)、片足が接触していると判定された場合(Y)には、前記表示パネル37等に、前記搭乗部31に片足が接触していることを示す搭乗状態2を表示する(S503)。また、前記ステップS502において、片足が接触した状態ではないと判定された場合(N)には、この判定処理を繰り返す。
【0071】
次いで、前記姿勢検出センサ43により、前記ピッチ軸角度θ(図3(A)参照)を監視し(S504)、車両の姿勢角度を監視中であることを示す搭乗状態3を表示する(S505)。次いで、前記ピッチ軸角度θが搭乗可能角度であるか否かが判定され(S506)、搭乗可能角度であると判定された場合(Y)には、車両の姿勢を安定させるための姿勢制御を開始する(S507)。また、前記ステップS506において、前記ピッチ軸角度θが搭乗可能角度ではないと判定された場合(N)には、この判定処理を繰り返す。
【0072】
次いで、前記表示パネル37等に前記姿勢制御が実行中であることを示す搭乗状態4が表示され(S508)、前記搭乗部31に搭乗者の両足が接触しているか否かが判定される(S509)。このステップS509において、両足が接触していると判定された場合(Y)には、前記表示パネル37に、前記搭乗部31に搭乗者の両足が接触していることを示す乗車状態5を表示し(S510)、車両が安定すると搭乗が完了したと判定され(S511)、車両が通常の走行可能状態にあることを示す搭乗状態6を表示する(S512)。また、前記ステップS509において、両足が接触した状態ではないと判定された場合(N)には、この判定処理を繰り返す。
【0073】
このように、搭乗者の搭乗状態及び車両の現在の制御状態を、搭乗者本人や周囲の人に知らせることによって、適切な操作が可能となり、安全性を向上させることができる。
【図面の簡単な説明】
【0074】
【図1】図1は、本実施の形態に係る平行二輪車の状態表示装置の基本的な構成を示す図である。
【図2】図2は、本実施の形態に係る平行二輪車の状態表示装置の走行状態検出手段の構成を示す図である。
【図3】図3(A),(B)は、平行二輪車の概略的構造を示す図である。
【図4】図4は、本発明の平行二輪車の状態表示装置の具体的な構成を示す図である。
【図5】図5は、速度と加速度との関係から走行状態を検出する処理を説明するためのグラフである。
【図6】図6は、速度と加速度との関係から減速状態を検出する処理を説明するためのグラフである。
【図7】図7は、速度と加速度とから走行状態を検出する処理を示すフローチャートである。
【図8】図8(A)は、ノイズを含んだ加速度を示すグラフであり、図8(B)は、ノイズを除去するためのフィルタ処理を施した加速度を示すグラフである。
【図9】図9は、フィルタ処理を施した加速度情報に対し、遅延を解消するための補正処理を説明するためのグラフである。
【図10】図10は、フィルタ後加速度に対し補正処理を施すことにより走行状態を検出する処理を示すフローチャートである。
【図11】図11は、速度の高低に応じた表示を行う処理を示すフローチャートである。
【図12】図12は、電源残量の表示を行う処理を示すフローチャートである。
【図13】図13は、搭乗者の搭乗状態及び制御状態の表示を行う処理を示すフローチャートである。
【符号の説明】
【0075】
1 平行二輪車の状態表示装置
2 車両状態検出手段
3 表示手段
5 走行状態検出手段
6 電源状態検出手段
7 搭乗状態検出手段
8 制御状態検出手段
10 減速状態表示部
11 後進状態表示部
12 速度状態表示部
13 電源残量表示部
14 足接触状態表示部
15 制御状態表示部
21 速度検出手段
22 加速度検出手段
23 フィルタ手段
24 補正手段
30 平行二輪車
31 搭乗部
32L,32R 車輪
33L,33R モータ
34 ハンドル
35L,35R 回転計
36 ランプ
37 表示パネル
【技術分野】
【0001】
本発明は、平行二輪車に関し、特に走行状態等の車両状態を外部に知らせるための技術に関するものである。
【背景技術】
【0002】
近年、同軸上に平行に配置された2つの車輪を備えて構成される平行二輪車の開発が進められている。自動車やバイク等の車両においては、例えば減速、後進等の走行状態を外部に知らせるための表示装置(代表的なものとしてブレーキランプ、バックランプ等)が備えられているが、このような表示装置は、平行二輪車にも備えられるべきものである。
【0003】
特許文献1において、上記のような表示装置を備える平行二輪車(車両装置)が開示されている。この特許文献1に係る平行二輪車は、車体の走行状態又は走行に関連した状態を検出する状態検出手段と、前記状態検出手段により検出される前記車体の走行状態又は走行関連状態を表示する表示手段とを備えるものである。これにより、車両の走行状態や走行関連状態を、運転者自身が認識できると共に、周囲の歩行者等に知らせることができるようになる。
【特許文献1】特開2005−335570号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、平行二輪車においては、自動車等の通常の車両に比べて、その走行状態を正確に検出することが難しいという問題がある。なぜなら、平行二輪車には、通常の車両に備えられるブレーキ、アクセル等に相当する機構がない場合が多く、単純にこれらの機構への操作の検知に基づいて、走行状態を判定することができないからである。また、平行二輪車においては、自動車等の通常の車両にはない監視すべき特有の車両状態、例えば倒立状の姿勢を安定させるための姿勢制御の実行状態、搭乗者の足部と搭乗部との接触状態等が存在し、このような状態も、外部(搭乗者本人を含む)に適切に知らせ得る手段が必要である。
【0005】
そこで、本発明は、車両に関する状態を外部に向けて表示する手段において、平行二輪車特有の問題を解決することを目的とする。
【課題を解決するための手段】
【0006】
上記課題の解決を図る本発明は、車両に関する状態を検出する車両状態検出手段と、前記車両状態検出手段により検出された情報を外部に知らせるための表示を行う表示手段とを有する平行二輪車の車両状態表示装置であって、前記車両状態検出手段は、車両の速度と加速度との関係に基づいて、少なくとも減速状態を含む走行状態を検出する走行状態検出手段を有するものである。
【0007】
このように、ブレーキペダル等がない平行二輪車においても、走行中の速度と加速度との関係を分析することにより、車両の減速状態を含む各種走行状態を検出することができる。そして、検出された走行状態を、例えば車体に設けられたランプ等の表示手段により、周囲の人や搭乗者本人に知らせることが可能となる。
【0008】
また、前記走行状態検出手段は、前記速度が正であり、且つ前記加速度が負である場合に、減速状態であると判定することが好ましい。
【0009】
また、前記走行状態検出手段は、車両の速度の時間的変化を検出する速度検出手段と、前記速度検出手段により検出された速度に基づいて、加速度の時間的変化を検出する加速度検出手段と、前記加速度検出手段により検出された加速度に対し、ノイズを除去するためのフィルタ処理を施すフィルタ手段と、前記フィルタ処理後の加速度と、前記速度検出手段により検出された速度との時間的ずれを補正する補正手段とを有することが好ましい。
【0010】
速度や加速度は、例えば車輪や駆動モータに設けられた回転計等の装置により得られる計測値から求めることができるが、このような計測値、又は計測値から得られる計算値には、ノイズが含まれる場合がある。そこで、このようなノイズを除去するために、速度から算出された加速度に対し、フィルタ処理を施すことが有効であるが、このフィルタ処理により、速度の時間軸に対して加速度が遅延を生じてしまう場合がある。そこで、この遅延を補正する処理を施すことにより、速度と加速度との関係を正確に把握することができ、車両の走行状態を正確に検出することが可能となる。
【0011】
具体的には、前記補正手段は、前記フィルタ処理後の加速度が、k>0を満たす閾値k以下になった時に、前記減速状態に入ったと判定することが好ましい。
【0012】
理論的には、速度が正であり、加速度が0未満になった時に、減速状態に入ったと判定されるが、上述したように、フィルタ処理による加速度の遅延を考慮すると、加速度が0よりも大きいkに達した時点で、減速状態に入ったと判定することがよい。これにより、フィルタ処理による加速度の遅延が吸収され、減速状態を正確に検出することができる。
【0013】
また、前記表示手段は、前記減速状態を表示する減速状態表示部を有するべきである。
【0014】
また、前記走行状態検出手段は、前記速度が負である場合に後進状態であると判定し、前記表示手段は、車両が前記後進状態にあることを表示する後進状態表示部を有することが好ましい。
【0015】
このように、後進状態を外部に知らせることにより、前記減速状態と同様に、安全性を向上させることができる。
【0016】
また、前記表示手段は、前記速度の高低に対応する表示を行う速度状態表示部を有することが好ましい。
【0017】
このように、車両の走行速度を外部に知らせることによっても、安全性を向上させることができる。
【0018】
また、本発明は、車両に関する状態を検出する車両状態検出手段と、前記車両状態検出手段により検出された情報を外部に知らせる表示手段とを有する平行二輪車の車両状態表示装置であって、前記車両状態検出手段は、電源の残量を検出する電源状態検出手段を有し、前記表示手段は、前記電源の残量を示す表示を行う電源残量表示部を有するものである。
【0019】
このように、電源残量を外部、特に搭乗者に知らせることにより、バッテリ切れによる不意な停車を防ぐことができ、安全性を向上させることができる。
【0020】
また、本発明は、車両に関する状態を検出する車両状態検出手段と、前記車両状態検出手段により検出された情報を外部に知らせる表示手段とを有する平行二輪車の車両状態表示装置であって、前記車両状態検出手段は、車両に設けられた搭乗部と搭乗者の足部との接触状態を検出する搭乗状態検出手段を有し、前記表示手段は、前記接触状態を示す表示を行う足接触状態表示部を有するものである。
【0021】
このように、搭乗者の足が所定の場所に正しく接触しているか否かを、特に搭乗者本人に知らせることにより、適切な操作が可能となり、安全性を向上させることができる。
【0022】
また、本発明は、車両に関する状態を検出する車両状態検出手段と、前記車両状態検出手段により検出された情報を外部に知らせる表示手段とを有する平行二輪車の車両状態表示装置であって、前記車両状態検出手段は、車両の姿勢を安定させる姿勢制御が実行可能か否かを検出する制御状態検出手段を有し、前記表示手段は、前記制御状態検出手段による検出結果を表示する制御状態表示部を有するものである。
【0023】
このように、特に搭乗者本人に対し、車両の現在の制御状態を知らせることにより、適切な操作が可能となり、安全性を向上させることができる。
【0024】
また、前記制御状態検出手段は、車両に設けられた搭乗部と搭乗者の足部との接触状態と、車両の姿勢とに基づいて、前記姿勢制御が実行可能か否かを判定することが好ましい。
【0025】
このように、制御可能な状態か否かは、搭乗者の足の接触状態と、車両の姿勢とに基づいて、正しく判定することができる。
【0026】
また、本発明は、上記平行二輪車の車両状態表示装置に対応する方法の発明である。この平行二輪車の車両状態表示方法に係る作用効果は、上記装置に係るものと同様である。
【発明の効果】
【0027】
上記本発明によれば、車両に関する状態を外部に向けて表示する手段において、平行二輪車特有の問題を解決することができる。
【発明を実施するための最良の形態】
【0028】
以下に、本発明の実施の形態を、添付した図面を参照して説明する。図1において、本実施の形態に係る平行二輪車の車両状態表示装置(以下、本装置と略記する)1の基本的な構成が示されている。本装置1は、車両(平行二輪車)に関する状態を検出する車両状態検出手段2と、前記車両状態検出手段2により検出された情報を外部に知らせる表示手段3とを有する。
【0029】
本実施の形態に係る前記車両状態検出手段2は、走行状態検出手段5、電源状態検出手段6、搭乗状態検出手段7、及び制御状態検出手段8を有する。
【0030】
前記走行状態検出手段5は、車両の速度と加速度との関係に基づいて、各種走行状態を検出するものであり、例えば速度が正であり、且つ加速度が負である場合に、車両が減速状態にあると判定するものである。前記電源状態検出手段6は、車両に搭載される電源の残量を検出するものである。前記搭乗状態検出手段7は、車両に設けられた搭乗部と搭乗者の足部との接触状態を検出するものである。前記制御状態検出手段8は、車両の姿勢を安定させる姿勢制御が実行可能か否かを検出するものである。
【0031】
本実施例に係る前記表示手段3は、減速状態表示部10、後進状態表示部11、速度状態表示部12、電源残量表示部13、足接触状態表示部14、及び制御状態表示部15を有する。
【0032】
前記減速状態表示部10は、前記走行状態検出手段5により、車両が減速状態にあると判定された場合に、車両が減速状態であることを外部(周囲にいる人や搭乗者本人)に知らせるための表示を行うものである。前記後進状態表示部10は、前記走行状態検出手段5により、車両が後進状態にあると判定された場合に、車両が後進状態であることを外部に知らせるための表示を行うものである。前記速度状態表示部12は、前記走行状態検出手段5により検出された速度情報に基づいて、速度の高低に対応する表示を外部に対して行うものである。前記電源残量表示部14は、前記電源状態検出手段6により検出された電源残量を、外部に対して表示するものである。前記足接触状態表示部14は、前記搭乗状態検出手段7により検出された搭乗部と搭乗者の脚部との接触状態を、外部に対して表示するものである。前記制御状態表示部15は、前記制御状態検出手段8により検出された前記姿勢制御の実行可能か否かに関する情報を、外部に対して表示するものである。
【0033】
また、前記走行状態検出手段5は、図2に示すように、速度検出手段21、加速度検出手段22、フィルタ手段23、及び補正手段24を有する。
【0034】
前記速度検出手段21は、車両の速度の時間的変化を検出するものであり、周知の回転計等の計測装置、CPU、記憶装置(ROM、RAM等)、所定のプログラム等の協働により構成することができる。
【0035】
前記加速度検出手段22は、前記速度検出手段21により検出された速度に基づいて、加速度の時間的変化を検出するものであり、CPU、記憶装置、所定のプログラム等の協働により構成することができる。
【0036】
前記フィルタ手段23は、前記加速度検出手段22により検出された加速度に対し、ノイズを除去するためのフィルタ処理を施すものであり、周知のLPF(low-pass filter)回路、CPU、記憶装置、所定のプログラム等の協働により構成することができる。
【0037】
前記補正手段24は、前記フィルタ処理後の加速度と、前記速度検出手段21により検出された速度との時間的ずれを補正するものであり、CPU、記憶装置、所定のプログラム等の協働により構成することができる。
【0038】
上記構成を有する本装置1によれば、ブレーキペダル等がない平行二輪車においても、走行中の速度と加速度との関係を分析することにより、車両の減速状態を含む各種走行状態を検出することができる。そして、検出された走行状態を、例えば車体に設けられたランプ等の表示手段により、周囲の人や搭乗者本人に知らせることが可能となる。
【0039】
また、計測や計算により得られる速度や加速度には、ノイズが含まれる場合があるが、前記走行状態検出手段5によれば、前記フィルタ手段23によりノイズが除去されると共に、前記補正手段24により、前記フィルタ処理に伴って発生する時間的ずれが補正されるので、前記減速状態等の検出を正確に行うことが可能となる。
【0040】
以下に、上記本装置1を適用した具体的構成例を、図3〜図13により説明する。図3(A),(B)において、本装置1が適用される平行二輪車30の概略的な構成が示されている。この平行二輪車30は、搭乗者が乗る搭乗部31に対し、同軸上に平行に車輪32L,32Rが配置され、それぞれの車輪32L,32Rに対して独立して駆動力を発生させる電動モータ等からなる駆動装置33L,33Rを有する。前記搭乗部31には、搭乗者の状態(搭乗部31と搭乗者の足部との接触状態)を検出する各種センサ又はスイッチが配置され、搭乗者が操作時に把持するハンドル34が立設されている。また、前記駆動装置33L,33Rのそれぞれには、車輪32L,32Rの回転速度及び回転方向を検出可能な回転計35L,35Rが設置されている。更に、前記搭乗部31の後端部にはランプ36が設置され、前記ハンドル34の上端部には表示パネル37が設置されている。また、図3(A),(B)において、この平行二輪車30に対応する座標系が示されており、車軸に対して垂直方向をX軸、車軸方向をY軸、鉛直方向をZ軸、車軸周りの角度をピッチ軸角度θとする。
【0041】
図4において、前記平行二輪車30の具体的な構成が示されている。この平行二輪車30は、制御演算装置41、搭乗者検出センサ42、姿勢検出センサ43、駆動装置44、モータ33L,33R、回転計35L,35R、電源装置47、表示装置48を有している。
【0042】
前記制御演算装置41は、CPU、記憶装置(ROM,RAM等)、所定のプログラム等の協働により構成され、後述する搭乗者検出センサ42及び姿勢検出センサ43からの検出信号、前記モータ33L,33Rからのフィードバック信号等に基づいて、前記駆動装置44に対する制御指令τを生成し出力する。アクチュエータ等からなる駆動装置44は、前記制御指令τを受けて所定の駆動トルクを生成し、これを駆動指令としてそれぞれのモータ33L,33Rに供給する。これにより、平行二輪車30の姿勢制御が実行される。尚、前記制御指令τの生成方法については、説明を省略する(例えば、特開2007−331443号公報等を参照)。また、本実施の形態に係る制御演算装置41は、前記回転計35L,35Rからの検出信号、前記搭乗者検出センサ42からの検出信号、前記姿勢検出センサ43からの検出信号、前記電源装置47からの電圧値信号等に基づいて、各種車両状態を示す信号を生成し、前記表示装置48に出力する。この点については後に詳述する。
【0043】
前記搭乗者検出センサ42は、前記搭乗部31と搭乗者の足部との接触状態を検出するための複数のセンサ群であり、例えば加重センサ51、近接センサ52、接触センサ53等から構成される。これらのセンサ51,52,53による検出結果は、前記制御演算装置41に出力され、搭乗者の両足が搭乗部31に接触しているか、片足のみ接触しているか、搭乗者が搭乗部31上に存在しているか、搭乗部31上のどの位置に乗っているか等の判定に用いられる。尚、これらのセンサ51,52,53としては、周知の構成及び作用効果を有するものを適宜選択して用いることができる。
【0044】
前記姿勢検出センサ43は、前記平行二輪車30の姿勢を検出するための複数のセンサ群であり、例えばジャイロセンサ55,加速度センサ56等から構成される。これらのセンサ55,56による検出結果は、前記制御演算装置41に出力され、前記姿勢制御に用いられるピッチ軸角度θやピッチ軸角速度ωの算出に用いられる。尚、これらのセンサ55,56としては、周知の構成及び作用効果を有するものを適宜選択して用いることができる。
【0045】
前記回転計35L,35Rは、前記モータ33L,33Rの回転速度及び回転方向を検出するものであり、この検出結果は、前記制御演算装置41に出力され、車両速度v、車両加速度a、及び車両の進行方向の検出に用いられる。この回転計35L,35Rとしては、周知の構成及び作用効果を有するのもを適宜選択して用いることができる。
【0046】
前記電源装置47は、当該平行二輪車30の各構成要素に駆動電力を供給するものであり、周知の充電式バッテリ等から構成されるものである。この電源装置47が発生させる電圧等に関する情報は、前記制御演算装置41に出力され、バッテリの残量情報の生成に用いられる。
【0047】
前記表示装置48は、前記ランプ36、前記表示パネル37等から構成され、前記制御演算装置41により検出された各種車両状態を、外部に知らせるものである。
【0048】
図5〜図7において、速度vと加速度aとの関係に基づいて、平行二輪車30の走行状態を検出する方法について説明する。図5及び図6において、破線は速度vを示し、実線は加速度aを示している。図5において、速度vが正の値である区間(v>0)は、車両が前進走行を行っており、速度vが負の値である区間(v<0)は、車両が後進走行を行っていることを示している。また、加速度aが正の値である区間(a>0)は、車両は加速状態であり、加速度aが負の値である区間(a<0)は、車両は減速状態であることを示している。特に、図6に示すように、速度vが正であり、且つ加速度aが負である区間S(v>0,a<0)は、車両は前進走行中に減速した状態であり、自動車やバイク等の車両においては、ブレーキランプが点灯する状態であることを示している。
【0049】
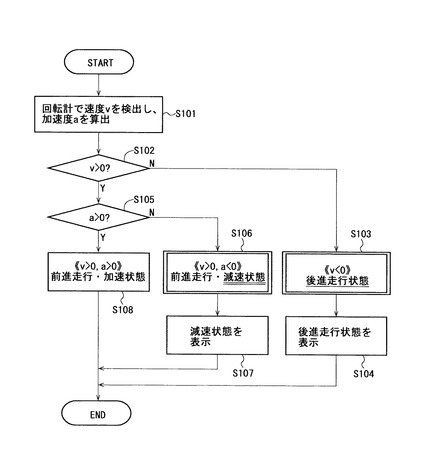
図7において、上記のように検出された走行状態を、前記表示装置48に表示させる際の制御フローが示されている。先ず、前記回転計35L,35Rにより所定の単位時間周期毎の速度vを取得してメモリに蓄積していき、この蓄積された速度情報に基づいて、速度vと同一の時間軸で対応する加速度aの変化を算出する(S101)。加速度aは、例えば下記式(1)により算出することができる。
a=(vnow−vold)/dt …(1)
尚、vnowは計測時点での車両速度であり、voldは、一単位時間周期前の車両速度であり、dtは単位時間周期を示す。
【0050】
次いで、速度vが正の値であるか否かを判定し(S102)、正ではないと判定された場合(N:v<0)には、車両は後進走行状態にあると判定し(S103)、前記表示装置48により、後進走行中であることを示す表示、即ち通常の自動車等におけるバックランプに相当する表示を行う(S104)。一方、前記ステップS102において、速度vが正の値であると判定された場合(Y)には、次いで加速度aが正の値であるか否かを判定する(S105)。
【0051】
前記ステップS105において、加速度aが正ではないと判定された場合(N:v>0,a<0)には、車両は前進走行中の減速状態であると判定し(S106)、減速状態であることを示す表示、即ち通常の自動車等におけるブレーキランプに相当する表示を行う(S107)。一方、前記ステップS105において、加速度aが正であると判定された場合(Y:v>0,a>0)には、車両は前進走行中の加速状態であると判定し(S108)、何も表示しない。
【0052】
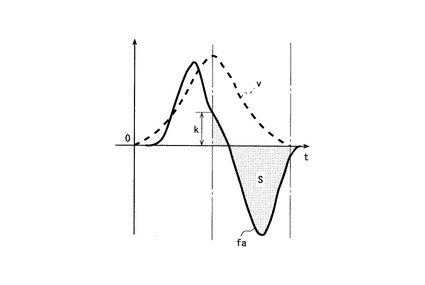
次に、図8及び図9において、加速度aに対してフィルタ処理を行うと共に、このフィルタ処理により生ずる時間的ずれを補正する処理について説明する。図8(A)に示すように、回転計35L,35Rにより計測された速度vに基づいて算出された加速度aには、ノイズ(高周波成分)が含まれる場合がある。図8(B)において、ノイズを含んだ加速度aに対してLPF回路等を用いてフィルタ処理を施したフィルタ後加速度faが示されている。このフィルタ後加速度faは、不要な高周波成分が除去されて滑らかな波形となると共に、元の加速度aの波形から所定時間遅延したものとなる。このため、フィルタ後加速度faは、速度vとの間で時間的な対応が取れていない状態となる。
【0053】
そこで、図9に示すように、フィルタ後加速度faが0より大きい閾値kに達した時点で、前方進行中の減速状態を示す区間Sに入ったものと判定することにより、前記フィルタ処理による遅延を解消することができる。
【0054】
図10において、上記のようなフィルタ処理及び補正処理を施した場合の制御フローが示されている。先ず、前記回転計35L,35Rにより所定の単位時間周期毎の速度vを取得してメモリに蓄積していき、この蓄積された速度情報に基づいて、速度vと同一の時間軸で対応する加速度aの変化を算出する(S201)。次いで、この加速度aに対して、ノイズを除去するためのフィルタ処理を施し、フィルタ後加速度faを生成する(S202)。
【0055】
次いで、速度vが正の値であるか否かを判定し(S203)、正ではないと判定された場合(N:v<0)には、車両は後進走行状態にあると判定し(S204)、前記表示装置48により、後進走行中であることを示す表示、即ち通常の自動車等におけるバックランプに相当する表示を行う(S205)。一方、前記ステップS203において、速度vが正の値であると判定された場合(Y)には、次いでフィルタ後加速度faが閾値k(k>0)以下であるか否かを判定する(S206)。
【0056】
前記ステップS206において、フィルタ後加速度faが閾値k以下であると判定された場合(Y:v>0,fa≦k)には、車両は前進走行中の減速状態であると判定し(S207)、減速状態であることを示す表示、即ち通常の自動車等におけるブレーキランプに相当する表示を行う(S208)。一方、前記ステップS206において、フィルタ後加速度faがk以下ではないと判定された場合(N:v>0,fa≧k)には、車両は前進走行中の加速状態であると判定し(S209)、何も表示しない。
【0057】
次に、図11において、速度vの高低に応じた表示を行う際の制御について説明する。先ず、前記回転計46L,46Rにより速度vを検出し(S301)、この速度vが予め設定された速度v_lowよりも大きいか否かが判定され(S302)、v_lowよりも大きくないと判定された場合(N)には、前記表示パネル37(図3参照)やその他の表示装置に、速度vが速度v_low以下であることを表示する(S303)。
【0058】
一方、前記ステップS302において、速度vが速度v_lowよりも大きいと判定された場合(Y)には、次いで速度vが、速度v_midよりも大きいか否かが判定される(S304)。尚、v_mid>v_lowの関係が存する。前記ステップS304において、速度vが速度v_midよりも大きくないと判定された場合(N)には、前記表示パネル37等に速度vが速度v_low以上であることを表示する(S305)。
【0059】
一方、前記ステップS304において、速度vが速度v_midよりも大きいと判定された場合(Y)には、次いで速度vが、速度v_hiよりも大きいか否かが判定される(S306)。尚、v_hi>v_midの関係が存する。前記ステップS306において、速度vが速度v_hiよりも大きくないと判定された場合(N)には、前記表示パネル37等に速度vが速度v_mid以上であることを表示する(S307)。
【0060】
一方、前記ステップS306において、速度vが速度v_hiよりも大きいと判定された場合(N)には、次いで速度vが、速度v_limitよりも大きいか否かが判定される(S308)。尚、v_limit>v_hiの関係が存する。前記ステップS308において、速度vが速度v_limitよりも大きくないと判定された場合(N)には、前記表示パネル37等に速度vが速度v_hi以上であることを表示する(S309)。
【0061】
一方、前記ステップS308において、速度vが速度v_limitよりも大きいと判定された場合(Y)には、前記表示パネル37等に速度vが速度v_limit以上であることを表示する(S310)
【0062】
このように、車両の走行速度を搭乗者本人や周囲の人に知らせることによって、安全性を向上させることができる。
【0063】
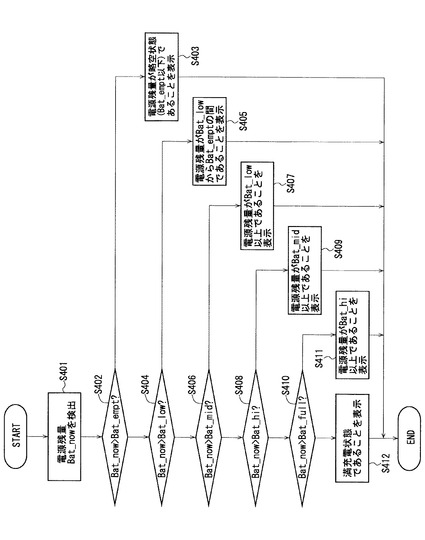
次に、図12において、電源残量Bat_nowを表示する際の制御について説明する。先ず、前記電源装置47が発生する電圧を監視することにより、電源残量Bat_nowを検出し(S401)、この電源残量Bat_nowが予め設定された電源残量Bat_emptよりも大きいか否かが判定され(S402)、Bat_emptよりも大きくないと判定された場合(N)には、前記表示パネル37等に、電源残量が略空状態であることを表示する(S403)。
【0064】
一方、前記ステップS402において、電源残量Bat_nowが電源残量Bat_emptよりも大きいと判定された場合(Y)には、次いで電源残量Bat_nowが、電源残量Bat_lowよりも大きいか否かが判定される(S404)。尚、Bat_empt>Bat_lowの関係が存する。前記ステップS404において、電源残量Bat_nowが電源残量Bat_lowよりも大きくないと判定された場合(N)には、前記表示パネル37等に電源残量Bat_nowが電源残量Bat_lowからBat_emptの間であることを表示する(S405)。
【0065】
一方、前記ステップS404において、電源残量Bat_nowが電源残量Bat_lowよりも大きいと判定された場合(Y)には、次いで電源残量Bat_nowが、電源残量Bat_midよりも大きいか否かが判定される(S406)。尚、Bat_mid>Bat_lowの関係が存する。前記ステップS406において、電源残量Bat_nowが電源残量Bat_midよりも大きくないと判定された場合(N)には、前記表示パネル37等に電源残量Bat_nowが電源残量Bat_low以上であることを表示する(S407)。
【0066】
一方、前記ステップS406において、電源残量Bat_nowが電源残量Bat_midよりも大きいと判定された場合(N)には、次いで電源残量Bat_nowが、電源残量Bat_hiよりも大きいか否かが判定される(S408)。尚、Bat_hi>Bat_midの関係が存する。前記ステップS408において、Bat_nowが電源残量Bat_hiよりも大きくないと判定された場合(N)には、前記表示パネル37等に電源残量Bat_nowが電源残量Bat_mid以上であることを表示する(S409)。
【0067】
一方、前記ステップS408において、電源残量Bat_nowが電源残量Bat_hiよりも大きいと判定された場合(N)には、次いで電源残量Bat_nowが、電源残量Bat_fullよりも大きいか否かが判定される(S410)。尚、Bat_full>Bat_hiの関係が存する。前記ステップS410において、Bat_nowが電源残量Bat_fullよりも大きくないと判定された場合(N)には、前記表示パネル37等に電源残量Bat_nowが電源残量Bat_hi以上であることを表示する(S411)。
【0068】
一方、前記ステップS410において、電源残量Bat_nowが電源残量Bat_fullよりも大きいと判定された場合(Y)には、前記表示パネル37等に満充電状態であることを表示する(S412)。
【0069】
このように、電源残量を搭乗者本人や周囲の人に知らせることによって、バッテリ切れによる不意な停車を防ぐことができ、安全性を向上させることができる。
【0070】
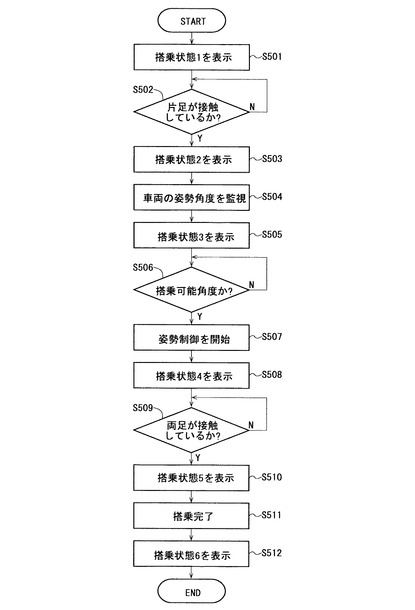
次に、図13において、搭乗者の搭乗状態及び平行二輪車30の制御状態を表示する際の制御について説明する。先ず、電源が投入されると、前記表示パネル37等に、通電状態であることを示す乗車状態1が表示され(S501)、次いで前記搭乗者検出センサ42により、
前記搭乗部31に搭乗者の片足が接触しているか否かが判定され(S502)、片足が接触していると判定された場合(Y)には、前記表示パネル37等に、前記搭乗部31に片足が接触していることを示す搭乗状態2を表示する(S503)。また、前記ステップS502において、片足が接触した状態ではないと判定された場合(N)には、この判定処理を繰り返す。
【0071】
次いで、前記姿勢検出センサ43により、前記ピッチ軸角度θ(図3(A)参照)を監視し(S504)、車両の姿勢角度を監視中であることを示す搭乗状態3を表示する(S505)。次いで、前記ピッチ軸角度θが搭乗可能角度であるか否かが判定され(S506)、搭乗可能角度であると判定された場合(Y)には、車両の姿勢を安定させるための姿勢制御を開始する(S507)。また、前記ステップS506において、前記ピッチ軸角度θが搭乗可能角度ではないと判定された場合(N)には、この判定処理を繰り返す。
【0072】
次いで、前記表示パネル37等に前記姿勢制御が実行中であることを示す搭乗状態4が表示され(S508)、前記搭乗部31に搭乗者の両足が接触しているか否かが判定される(S509)。このステップS509において、両足が接触していると判定された場合(Y)には、前記表示パネル37に、前記搭乗部31に搭乗者の両足が接触していることを示す乗車状態5を表示し(S510)、車両が安定すると搭乗が完了したと判定され(S511)、車両が通常の走行可能状態にあることを示す搭乗状態6を表示する(S512)。また、前記ステップS509において、両足が接触した状態ではないと判定された場合(N)には、この判定処理を繰り返す。
【0073】
このように、搭乗者の搭乗状態及び車両の現在の制御状態を、搭乗者本人や周囲の人に知らせることによって、適切な操作が可能となり、安全性を向上させることができる。
【図面の簡単な説明】
【0074】
【図1】図1は、本実施の形態に係る平行二輪車の状態表示装置の基本的な構成を示す図である。
【図2】図2は、本実施の形態に係る平行二輪車の状態表示装置の走行状態検出手段の構成を示す図である。
【図3】図3(A),(B)は、平行二輪車の概略的構造を示す図である。
【図4】図4は、本発明の平行二輪車の状態表示装置の具体的な構成を示す図である。
【図5】図5は、速度と加速度との関係から走行状態を検出する処理を説明するためのグラフである。
【図6】図6は、速度と加速度との関係から減速状態を検出する処理を説明するためのグラフである。
【図7】図7は、速度と加速度とから走行状態を検出する処理を示すフローチャートである。
【図8】図8(A)は、ノイズを含んだ加速度を示すグラフであり、図8(B)は、ノイズを除去するためのフィルタ処理を施した加速度を示すグラフである。
【図9】図9は、フィルタ処理を施した加速度情報に対し、遅延を解消するための補正処理を説明するためのグラフである。
【図10】図10は、フィルタ後加速度に対し補正処理を施すことにより走行状態を検出する処理を示すフローチャートである。
【図11】図11は、速度の高低に応じた表示を行う処理を示すフローチャートである。
【図12】図12は、電源残量の表示を行う処理を示すフローチャートである。
【図13】図13は、搭乗者の搭乗状態及び制御状態の表示を行う処理を示すフローチャートである。
【符号の説明】
【0075】
1 平行二輪車の状態表示装置
2 車両状態検出手段
3 表示手段
5 走行状態検出手段
6 電源状態検出手段
7 搭乗状態検出手段
8 制御状態検出手段
10 減速状態表示部
11 後進状態表示部
12 速度状態表示部
13 電源残量表示部
14 足接触状態表示部
15 制御状態表示部
21 速度検出手段
22 加速度検出手段
23 フィルタ手段
24 補正手段
30 平行二輪車
31 搭乗部
32L,32R 車輪
33L,33R モータ
34 ハンドル
35L,35R 回転計
36 ランプ
37 表示パネル
【特許請求の範囲】
【請求項1】
車両に関する状態を検出する車両状態検出手段と、
前記車両状態検出手段により検出された情報を外部に知らせる表示手段と、
を有する平行二輪車の車両状態表示装置であって、
前記車両状態検出手段は、車両の速度と加速度との関係に基づいて、少なくとも減速状態を含む走行状態を検出する走行状態検出手段を有する、
平行二輪車の車両状態表示装置。
【請求項2】
前記走行状態検出手段は、
前記速度が正であり、且つ前記加速度が負である場合に、減速状態であると判定する、
請求項1記載の平行二輪車の車両状態表示装置。
【請求項3】
前記走行状態検出手段は、
車両の速度の時間的変化を検出する速度検出手段と、
前記速度検出手段により検出された速度に基づいて、加速度の時間的変化を検出する加速度検出手段と、
前記加速度検出手段により検出された加速度に対し、ノイズを除去するためのフィルタ処理を施すフィルタ手段と、
前記フィルタ処理後の加速度と、前記速度検出手段により検出された速度との時間的ずれを補正する補正手段と、
を有する請求項2記載の平行二輪車の車両状態表示装置。
【請求項4】
前記補正手段は、
前記フィルタ処理後の加速度が、k>0を満たす閾値k以下になった時に、前記減速状態に入ったと判定する、
請求項3記載の平行二輪車の車両状態表示装置。
【請求項5】
前記表示手段は、車両が前記減速状態にあることを表示する減速状態表示部を有する、
請求項1〜4のいずれか1つに記載の平行二輪車の車両状態表示装置。
【請求項6】
前記走行状態検出手段は、前記速度が負である場合に後進状態であると判定し、
前記表示手段は、車両が前記後進状態にあることを表示する後進状態表示部を有する、
請求項1〜5のいずれか1つに記載の平行二輪車の車両状態表示装置。
【請求項7】
前記表示手段は、前記速度の高低に対応する表示を行う速度状態表示部を有する、
請求項1〜6のいずれか1つに記載の平行二輪車の車両状態表示装置。
【請求項8】
車両に関する状態を検出する車両状態検出手段と、
前記車両状態検出手段により検出された情報を外部知らせる表示手段と、
を有する平行二輪車の車両状態表示装置であって、
前記車両状態検出手段は、電源の残量を検出する電源状態検出手段を有し、
前記表示手段は、前記電源の残量を示す表示を行う電源残量表示部を有する、
平行二輪車の車両状態表示装置。
【請求項9】
車両に関する状態を検出する車両状態検出手段と、
前記車両状態検出手段により検出された情報を外部に知らせる表示手段と、
を有する平行二輪車の車両状態表示装置であって、
前記車両状態検出手段は、車両に設けられた搭乗部と搭乗者の足部との接触状態を検出する搭乗状態検出手段を有し、
前記表示手段は、前記接触状態を示す表示を行う足接触状態表示部を有する、
平行二輪車の車両状態表示装置。
【請求項10】
車両に関する状態を検出する車両状態検出手段と、
前記車両状態検出手段により検出された情報を外部に知らせる表示手段と、
を有する平行二輪車の車両状態表示装置であって、
前記車両状態検出手段は、車両の姿勢を安定させる姿勢制御が実行可能か否かを検出する制御状態検出手段を有し、
前記表示手段は、前記制御状態検出手段による検出結果を表示する制御状態表示部を有する、
平行二輪車の車両状態表示装置。
【請求項11】
前記制御状態検出手段は、車両に設けられた搭乗部と搭乗者の足部との接触状態と、車両の姿勢とに基づいて、前記姿勢制御が実行可能か否かを判定する、
請求項10記載の平行二輪車の車両状態表示装置。
【請求項12】
車両に関する状態を検出するステップと、
該検出された車両に関する情報を外部に知らせるための表示を行うステップと、
を有する平行二輪車の車両状態表示方法であって、
車両の速度と加速度との関係に基づいて、少なくとも減速状態を含む走行状態を検出するステップを有する、
平行二輪車の車両状態表示方法。
【請求項13】
前記速度が正であり、且つ前記加速度が負である場合に、前記減速状態であると判定するステップを有する、
請求項12記載の平行二輪車の車両状態表示方法。
【請求項14】
車両の速度の時間的変化を検出するステップと、
前記速度に基づいて加速度の時間的変化を検出するステップと、
前記加速度に対し、ノイズを除去するためのフィルタ処理を施すステップと、
前記フィルタ処理後の加速度と前記速度との時間的ずれを補正するステップと、
を有する請求項12記載の平行二輪車の車両状態表示方法。
【請求項15】
前記フィルタ処理後の加速度が、k>0を満たす閾値k以下になった時に、前記減速状態に入ったと判定するステップを有する、
請求項14記載の平行二輪車の車両状態表示方法。
【請求項16】
車両が前記減速状態にあることを表示するステップを有する、
請求項12〜15のいずれか1つに記載の平行二輪車の車両状態表示方法。
【請求項17】
前記速度が負である場合に後進状態であると判定するステップと、
車両が前記後進状態にあることを表示するステップと、
を有する請求項12〜16のいずれか1つに記載の平行二輪車の車両状態表示方法。
【請求項18】
前記速度の高低に対応する表示を行うステップを有する、
請求項12〜17のいずれか1つに記載の平行二輪車の車両状態表示方法。
【請求項19】
車両に関する状態を検出するステップと、
該検出された車両に関する情報を外部に知らせる表示を行うステップと、
を有する平行二輪車の車両状態表示方法であって、
電源の残量を検出するステップと、
該電源の残量を示す表示を行うステップと、
を有する平行二輪車の車両状態表示方法。
【請求項20】
車両に関する状態を検出するステップと、
該検出された車両に関する情報を外部に知らせる表示を行うステップと、
を有する平行二輪車の車両状態表示方法であって、
車両に設けられた搭乗部と搭乗者の足部との接触状態を検出するステップと、
前記接触状態を表示するステップと、
を有する平行二輪車の車両状態表示方法。
【請求項21】
車両に関する状態を検出する車両状態検出手段と、
該検出された車両に関する情報を外部に知らせる表示を行うステップと、
を有する平行二輪車の車両状態表示方法であって、
車両の姿勢を安定させる姿勢制御が実行可能か否かを検出するステップと、
該姿勢制御に関する検出結果を表示するステップと、
を有する平行二輪車の車両状態表示方法。
【請求項22】
車両に設けられた搭乗部と搭乗者の足部との接触状態と、車両の姿勢とに基づいて、前記姿勢制御が実行可能か否かを判定するステップを有する、
請求項21記載の平行二輪車の車両状態表示方法。
【請求項1】
車両に関する状態を検出する車両状態検出手段と、
前記車両状態検出手段により検出された情報を外部に知らせる表示手段と、
を有する平行二輪車の車両状態表示装置であって、
前記車両状態検出手段は、車両の速度と加速度との関係に基づいて、少なくとも減速状態を含む走行状態を検出する走行状態検出手段を有する、
平行二輪車の車両状態表示装置。
【請求項2】
前記走行状態検出手段は、
前記速度が正であり、且つ前記加速度が負である場合に、減速状態であると判定する、
請求項1記載の平行二輪車の車両状態表示装置。
【請求項3】
前記走行状態検出手段は、
車両の速度の時間的変化を検出する速度検出手段と、
前記速度検出手段により検出された速度に基づいて、加速度の時間的変化を検出する加速度検出手段と、
前記加速度検出手段により検出された加速度に対し、ノイズを除去するためのフィルタ処理を施すフィルタ手段と、
前記フィルタ処理後の加速度と、前記速度検出手段により検出された速度との時間的ずれを補正する補正手段と、
を有する請求項2記載の平行二輪車の車両状態表示装置。
【請求項4】
前記補正手段は、
前記フィルタ処理後の加速度が、k>0を満たす閾値k以下になった時に、前記減速状態に入ったと判定する、
請求項3記載の平行二輪車の車両状態表示装置。
【請求項5】
前記表示手段は、車両が前記減速状態にあることを表示する減速状態表示部を有する、
請求項1〜4のいずれか1つに記載の平行二輪車の車両状態表示装置。
【請求項6】
前記走行状態検出手段は、前記速度が負である場合に後進状態であると判定し、
前記表示手段は、車両が前記後進状態にあることを表示する後進状態表示部を有する、
請求項1〜5のいずれか1つに記載の平行二輪車の車両状態表示装置。
【請求項7】
前記表示手段は、前記速度の高低に対応する表示を行う速度状態表示部を有する、
請求項1〜6のいずれか1つに記載の平行二輪車の車両状態表示装置。
【請求項8】
車両に関する状態を検出する車両状態検出手段と、
前記車両状態検出手段により検出された情報を外部知らせる表示手段と、
を有する平行二輪車の車両状態表示装置であって、
前記車両状態検出手段は、電源の残量を検出する電源状態検出手段を有し、
前記表示手段は、前記電源の残量を示す表示を行う電源残量表示部を有する、
平行二輪車の車両状態表示装置。
【請求項9】
車両に関する状態を検出する車両状態検出手段と、
前記車両状態検出手段により検出された情報を外部に知らせる表示手段と、
を有する平行二輪車の車両状態表示装置であって、
前記車両状態検出手段は、車両に設けられた搭乗部と搭乗者の足部との接触状態を検出する搭乗状態検出手段を有し、
前記表示手段は、前記接触状態を示す表示を行う足接触状態表示部を有する、
平行二輪車の車両状態表示装置。
【請求項10】
車両に関する状態を検出する車両状態検出手段と、
前記車両状態検出手段により検出された情報を外部に知らせる表示手段と、
を有する平行二輪車の車両状態表示装置であって、
前記車両状態検出手段は、車両の姿勢を安定させる姿勢制御が実行可能か否かを検出する制御状態検出手段を有し、
前記表示手段は、前記制御状態検出手段による検出結果を表示する制御状態表示部を有する、
平行二輪車の車両状態表示装置。
【請求項11】
前記制御状態検出手段は、車両に設けられた搭乗部と搭乗者の足部との接触状態と、車両の姿勢とに基づいて、前記姿勢制御が実行可能か否かを判定する、
請求項10記載の平行二輪車の車両状態表示装置。
【請求項12】
車両に関する状態を検出するステップと、
該検出された車両に関する情報を外部に知らせるための表示を行うステップと、
を有する平行二輪車の車両状態表示方法であって、
車両の速度と加速度との関係に基づいて、少なくとも減速状態を含む走行状態を検出するステップを有する、
平行二輪車の車両状態表示方法。
【請求項13】
前記速度が正であり、且つ前記加速度が負である場合に、前記減速状態であると判定するステップを有する、
請求項12記載の平行二輪車の車両状態表示方法。
【請求項14】
車両の速度の時間的変化を検出するステップと、
前記速度に基づいて加速度の時間的変化を検出するステップと、
前記加速度に対し、ノイズを除去するためのフィルタ処理を施すステップと、
前記フィルタ処理後の加速度と前記速度との時間的ずれを補正するステップと、
を有する請求項12記載の平行二輪車の車両状態表示方法。
【請求項15】
前記フィルタ処理後の加速度が、k>0を満たす閾値k以下になった時に、前記減速状態に入ったと判定するステップを有する、
請求項14記載の平行二輪車の車両状態表示方法。
【請求項16】
車両が前記減速状態にあることを表示するステップを有する、
請求項12〜15のいずれか1つに記載の平行二輪車の車両状態表示方法。
【請求項17】
前記速度が負である場合に後進状態であると判定するステップと、
車両が前記後進状態にあることを表示するステップと、
を有する請求項12〜16のいずれか1つに記載の平行二輪車の車両状態表示方法。
【請求項18】
前記速度の高低に対応する表示を行うステップを有する、
請求項12〜17のいずれか1つに記載の平行二輪車の車両状態表示方法。
【請求項19】
車両に関する状態を検出するステップと、
該検出された車両に関する情報を外部に知らせる表示を行うステップと、
を有する平行二輪車の車両状態表示方法であって、
電源の残量を検出するステップと、
該電源の残量を示す表示を行うステップと、
を有する平行二輪車の車両状態表示方法。
【請求項20】
車両に関する状態を検出するステップと、
該検出された車両に関する情報を外部に知らせる表示を行うステップと、
を有する平行二輪車の車両状態表示方法であって、
車両に設けられた搭乗部と搭乗者の足部との接触状態を検出するステップと、
前記接触状態を表示するステップと、
を有する平行二輪車の車両状態表示方法。
【請求項21】
車両に関する状態を検出する車両状態検出手段と、
該検出された車両に関する情報を外部に知らせる表示を行うステップと、
を有する平行二輪車の車両状態表示方法であって、
車両の姿勢を安定させる姿勢制御が実行可能か否かを検出するステップと、
該姿勢制御に関する検出結果を表示するステップと、
を有する平行二輪車の車両状態表示方法。
【請求項22】
車両に設けられた搭乗部と搭乗者の足部との接触状態と、車両の姿勢とに基づいて、前記姿勢制御が実行可能か否かを判定するステップを有する、
請求項21記載の平行二輪車の車両状態表示方法。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図8】

【図9】
【図10】

【図11】

【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−30437(P2010−30437A)
【公開日】平成22年2月12日(2010.2.12)
【国際特許分類】
【出願番号】特願2008−194846(P2008−194846)
【出願日】平成20年7月29日(2008.7.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年2月12日(2010.2.12)
【国際特許分類】
【出願日】平成20年7月29日(2008.7.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]