
Fターム[3K039MB00]の内容
車両の外部照明装置、信号 (9,386) | 検知手段 (641)
Fターム[3K039MB00]の下位に属するFターム
速度 (147)
アクセル (15)
クラッチ (4)
ブレーキ (107)
変速機 (4)
光センサ (97)
ドアの開閉(例;スイッチに連動するものも含む) (21)
イグニッションキー (10)
加速度、減速度 (66)
故障検知 (69)
Fターム[3K039MB00]に分類される特許
1 - 20 / 101
照明制御装置
ドライブレコーダシステム
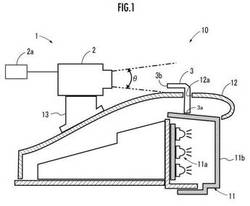
【課題】比較的簡単に車両に取り付けできると共に、後方視界の映像と制動装置の作動状況とが同時点のものであることを、より確実に保証できるドライブレコーダシステムを提供する。
【解決手段】ドライブレコーダシステム1は、化粧カバー12に設けられた孔12aに嵌合され、制動灯11の光を導光する導光手段3と、車両10の後方視界と導光手段3に導かれた光とを画角内に収めて撮像する撮像装置とを備える。
(もっと読む)
車両用前照灯制御装置

【課題】車体の対路面ピッチ角に応じて光軸方向を制御する技術において、鉛直方向に対して固定された基準面(例えば水平面)に対する車体の傾斜角を検出する傾斜検出手段の出力に基づいて対路面ピッチ角を算出する際、坂道で誤った対路面ピッチ角を算出してしまう可能性を低減することを目的とする。
【解決手段】制御部6は、傾斜検出手段4が検出した絶対ピッチ角と、大気圧センサ5が検出した大気圧の変動量に基づいて、大気圧の変動が少ない場合に、絶対ピッチ角を対路面ピッチ角とする。あるいは、大気圧の変動に基づいて路面勾配を算出し、算出した路面勾配と絶対ピッチ角の差を対路面ピッチ角とする。
(もっと読む)
車両警光灯システムおよびそれを備えた車両
【課題】対象車両に設置車両の存在を安全に認識させることができる車両警光灯システムおよびそれを備えた車両を提供することである。
【解決手段】本発明に係る車両警光灯システム100およびそれを備えた車両においては、散光式警光灯120を有するパトカー201と、被追尾車両202とが遠ざかっているか近づいているかを判定し、判定に応じて散光式警光灯120の第1モードから第5モードの放光動作レベルを変化させるプロセッサ111と、を含むものである。
(もっと読む)
車両用前照灯制御装置
【課題】車両に搭載される車両用前照灯制御装置において、自車両が走行している道路が左側走行道路か右側走行道路かを推定し、当該道路の車線数を推定し、その推定結果に応じた光軸制御を行う。
【解決手段】車両の前方の撮影画像に写された他車両の光源が先行車の光源であるか対向車の光源であるかを検出し(ステップ120)、撮影画像に写された他車両の光源から、当該他車両の位置座標を検出し(ステップ130)、他車両の位置座標が正面方向よりも右か左かで、左側通行か右側通行か推定し(ステップ140)、他車両が先行車か対向車か、および、他車両の位置座標に基づいて、車線数を推定し(ステップ150)、それら推定結果に基づいて、光軸の左右方向の変動許容範囲を変化させる(ステップ150)。
(もっと読む)
車両用前照灯の配光制御システム
【課題】比較的急なカーブを走行する際に、運転者が無意識のうち速度を上げてしまうことを抑制することができる車両用前照灯の配光制御システムを提供する。
【解決手段】自車両の車速を算出する車速算出手段と、自車両の走行する道路の曲率を算出する曲率算出手段(41)と、車速算出手段から得られる自車両の車速と曲率算出手段(41)から得られる道路の曲率を関連付けて記録する走行記録手段(42)と、現在走行する自車両の車速が、走行記録手段(42)の記録に基づき、現在走行する道路とほぼ同様の曲率を有する道路の前記曲率に関連付けられた車速よりも上昇傾向にあることを検知する車速上昇検知手段(46)と、車速上昇検知手段(46)によって自車両の車速が上昇傾向にある場合、前照灯のそれまでの配光から減速を促す他の配光に切り替える配光切替手段(47)と、を備える。
(もっと読む)
ヘッドライト制御装置、ヘッドライトシステム、及びヘッドライトシステムの制御方法
【課題】前走車や対向車のみならず、人や動物等にも配慮したハイビームの照射が可能なヘッドライト制御装置、ヘッドライトシステム、及びヘッドライトシステムの制御方法等を提供する。
【解決手段】ヘッドライト制御装置120は、熱源検知部としての赤外線カメラ122と、熱判定部124と、ビーム方向制御部128とを備えている。赤外線カメラ122は、ヘッドライト112の照射範囲の熱画像を取得する。熱判定部124は、赤外線カメラ122により取得された熱画像に基づいて、熱画像の有無を判定する。ビーム方向制御部128は、熱判定部124の判定結果により照射範囲の熱源を検知したとき、ヘッドライト112の照射光が熱源に照射されないように照射範囲を切り替える制御を行う。
(もっと読む)
光軸制御装置
【課題】走行時の車体ピッチ角に対し時間的な遅れが抑制されたヘッドランプ照射角度の適切な制御を実現できる光軸制御装置を提供する。
【解決手段】車体が一定以上の大きさの上下加速度を受けると、そのときの車両ピッチング減衰特性を上下加速度に対応させて車両減衰特性データベース3へ記録し、一定以上の大きさの上下加速度を受けるたびに更新されるようにする。さらに一定範囲内の大きさの上下加速度入力時の車両ピッチング減衰特性を車両減衰特性データベース3へ記録する。一方、一定以上の大きさの上下加速度を車体が受けると、前記上下加速度に対応して車両減衰特性データベース3に記録されている車両ピッチング減衰特性を読み出し、逆位相のヘッドライト照射角制御信号をフィードフォワード的にヘッドライト照射角制御信号生成手段18により生成し、時間的な遅れなくヘッドライトの照射角を制御する。
(もっと読む)
車両の防眩制御装置
【課題】情報検出時点以降に対向車両又は先行車両になりうる他車両を検出し、適切に自車両のヘッドライトをハイビームとロービームとに切替えることができるようにした、車両の防眩制御装置を提供する。
【解決手段】
周辺道路情報検出手段17は、車両1の前方の交差道路を検出し、他車両情報検出手段14は、他車両2の位置情報と他車両2における右左折予定情報とを検出し、配光制御手段15は、周辺道路情報検出手段17により車両1の前方に交差道路があることが検出され、且つ、他車両情報検出手段14により他車両2が交差道路から進入しうる位置にいることが検出された場合、少なくとも他車両2において右左折予定情報が得られていることを含む配光制御条件が成立したら、車両1のヘッドライトをロービームにする。
(もっと読む)
車両の防眩制御装置
【課題】情報検出時点以降に対向車両又は先行車両になりうる他車両を検出し、適切に自車両のヘッドライトをハイビームとロービームとに切替えることができるようにした、車両の防眩制御装置を提供する。
【解決手段】
配光制御手段15は、周辺道路情報検出手段17により車両1の前方に交差道路があることが検出され、且つ、他車両情報検出手段17により他車両2が交差道路から進入しうる位置にいることが検出された場合、少なくとも他車両2の走行ルート設定手段25により設定された走行ルートに従って他車両2が走行すれば他車両2が交差道路から右折又は左折をして進入することを含む配光制御条件が成立したら、車両1のヘッドライトをロービームにする。
(もっと読む)
前照灯制御装置
【課題】前方車両との相対速度に応じて、安全な夜間走行が可能となるように前照灯を制御することができる前照灯制御装置を提供することを目的とする。
【解決手段】前照灯のハイビームとロービームとの切り換えを制御する前照灯制御部14と、前方車両を検出する前方車両検出部11と、前方車両との車間距離を検出する車間距離検出部12と、前方車両の相対速度を検出する相対速度検出部13とを備え、前照灯制御部14は、前方車両を検出した場合、相対速度検出部13で検出した相対速度に対応する該当車間距離閾値を決定し、車間距離検出部12で検出した車間距離が該当車間距離閾値を超えたことを条件として前照灯2をロービームからハイビームに切り替える。
(もっと読む)
前照灯装置
【課題】前方の車両数が多い場合に、車両位置を適切に管理する前照灯装置を提供すること。
【解決手段】前方車両の存在に応じて配光パターンを変化させることができる前照灯装置100において、前方車両を検出し、近接した複数の前方車両のうち右端及び左端の前方車両の位置のみを推定する前方車両検出手段11と、右端の前方車両が存在する位置から左端の前方車両が存在する位置までの一連の配光領域を除き前方を照明する照明領域制御手段12と、を有することを特徴とする。
(もっと読む)
前照灯制御システム
【課題】車両の走行中にパッシング動作を適切なタイミングで実行することができる前照灯制御システムを提供する。
【解決手段】車両20の走行路に設置された表示手段40に表示された表示情報41を撮影可能な撮影手段と22、撮影手段によって撮影された表示情報41に基づいて車両20の前照灯21のハイビームとロービームとの切り換えを制御する前照灯制御手段28と、を有し、前照灯制御手段28が、前照灯21がロービームである場合に、表示情報41に基づいてパッシング動作を実行するようにする。
(もっと読む)
車両前照灯制御装置
【課題】車載カメラで撮影した画像に基づいて、光源の位置を検出し、検出した位置に自車両の前照灯の照射方向を向ける技術において、検出した光源に照射方向を向けるか否かの判定を改良することで、照射方向の制御の信頼性を高める。
【解決手段】車両の周囲を撮影し、撮影した画像に基づいて光源を検出し、検出した光源の位置情報を出力する画像センサから、光源の位置情報を取得し(ステップ110)、車両の舵角またはヨーレートの検出値に応じて決まる車両の進行方向範囲内に光源があるか否かを、取得した光源の位置情報に基づいて判定し(ステップ120)、判定結果が肯定的であることに基づいて、光源の方向に前照灯の照射方向を追従させる制御を行い(ステップ140)、判定結果が否定的であることに基づいて、光源の位置と無関係に前照灯を制御する(ステップ150、155)。
(もっと読む)
照明装置および当該照明装置を備えた車両用前照灯
【課題】レーザ光源とその他の光源との特性を併せて利用した照明装置を実現する。
【解決手段】本発明に係るヘッドランプシステム100は、レーザ光を受けて発光する発光部を備えるレーザ光源ユニット1aと、LEDを備えるLED光源ユニット2a・2bとを備え、レーザ光源ユニット1aは配光スポットA1に向けて配光すると共に、LED光源ユニット2a・2bは配光エリアa1・a2に向けて配光する。
(もっと読む)
車両用前照灯の点灯制御装置、車両用前照灯システム
【課題】自車両の前方の曲路に現れる前方車両に対してグレアを与えることを回避する。
【解決手段】車両用前照灯の点灯制御装置は、カメラによって自車両の前方を撮影して得られた画像に基づいて対象車両のランプから発せられる光が1つだけ存在するか否かを判定するランプ判定部と、画像に基づいてランプの位置に応じた遮光範囲を設定する遮光範囲設定部と、自車両の前方に曲路が存在する場合に当該曲路の方向を検出する曲路検出部と、曲路検出部によって検出された曲路の方向に応じて遮光範囲に補正量を付与する遮光範囲補正部と、遮光範囲補正部による補正後の遮光範囲に基づいて前照灯を駆動する前照灯制御部を備える。
(もっと読む)
前照灯制御装置
【課題】対向車両に対する幻惑の防止を図りつつ早期に遠方視界を確保する上で有利な前照灯制御装置を提供する。
【解決手段】対向車両検出手段20Aは、自車両2とすれ違う対向車両6を検出する。位置検出手段20Bは、自車両2が走行する道路L0の幅方向の位置を検出する。道路形状推定手段20Cは、自車両2が走行する道路形状を推定する。切り替え制御手段20Dは、前照灯4がハイビームの状態で対向車両検出手段20Aにより対向車両6が検出されると、切り替え部18によって前照灯4をロービーム維持期間ΔTLOWだけロービームに切り替えたのちハイビームに復帰させる。期間算出手段20Eは、ロービーム維持期間ΔTLOWを、道路の幅方向における自車両の位置と、推定した道路形状と、走行速度とに基づいて算出する。
(もっと読む)
車両用前照灯制御装置
【課題】前照灯の点灯状態に運転者の意思を的確に反映させる。
【解決手段】車両用前照灯制御装置10は、車両に備えられたロー側前照灯20およびハイ側前照灯21と、車両の乗員により操作されて信号を出力する操作スイッチ13と、操作スイッチ13から出力された信号に基づいてロー側前照灯20およびハイ側前照灯21の点灯状態を制御する点灯制御部35とを備える。操作スイッチ13は、車両のステアリングハンドルS上に設けられ、点灯制御部35は、ロー側前照灯20の点灯時に乗員により操作スイッチ13がオン操作された場合にはロー側前照灯20の点灯輝度を増大させる。
(もっと読む)
ランプ制御装置
【課題】ランプが照射することによる視認性の向上とランプに関する省エネルギとを両立させることができるランプ制御装置を提供する。
【解決手段】制御部10は、照度センサ32の検出照度に基づいて、車両3近傍の明るさを検出し、車両3前方を撮像した撮像画像に基づいて、車両3遠方の明るさを検出する。そして、制御部10は、車両3近傍が明るく車両3遠方が暗い場合に、前照灯21,22の明るさが明るくなるよう、駆動回路13,14を介して半導体リレー11を連続的にオンにすることによって、前照灯21,22を連続的に点灯させ、車両3近傍及び車両3遠方が共に明るい場合、車両3近傍及び車両3遠方が共に暗い場合、並びに車両3近傍が暗く車両3遠方が明るい場合に、前照灯21,22の明るさが暗くなるよう、駆動回路13,14を介して半導体リレー11を断続的にオンにすることによって、前照灯21,22を断続的に点灯させる。
(もっと読む)
撮像装置及びこれを備えた物体検出装置、並びに、光学フィルタ及びその製造方法
【課題】光量が大きく異なっている複数の光源体をより短い時間間隔で連続して検出することを課題とする。
【解決手段】撮像領域内に存在する物体からの光を、光学フィルタを介して、受光素子(撮像画素a,b,c,・・・)が2次元配置された画素アレイで構成された画像センサにより受光することで、撮像領域内を撮像する撮像装置において、上記光学フィルタは、透過率が低い光透過領域(撮像画素b,d,e,gに対応したフィルタ領域)と透過率が高い光透過領域(撮像画素a,c,f,hに対応したフィルタ領域)が、撮像画素単位で、上記画素アレイの2次元方向へ交互に配置されている透過率調整層を有する。
(もっと読む)
1 - 20 / 101
[ Back to top ]