
支保工建て込み方法及び支保工建て込みシステム
【課題】エレクタ装置の操縦席に座ったまま、ターゲットの自動追尾測量により支保工の移動をリアルタイムで常時監視しながらその設置位置を調整でき、精度と作業性と経済性と安全性の優れた支保工建て込み方法及び支保工建て込みシステムを提供する。
【解決手段】建て込む支保工9の左、右及び上中央の少なくとも3箇所にターゲット14C・14L・14Rを取り付け、そのそれぞれについて、トータルステーション1で自動追尾してトンネル中心からの距離Rpを測量し、その測量した距離Rpと予め入力した支保工の設計値Rtとを、エレクタコントローラ6において、予め入力したターゲットの設置高さHp分を差し引いて比較して、その誤差をモニタ5に表示し、誤差が設定以下になるようにエレクタ装置4にて支保工を調整する。
【解決手段】建て込む支保工9の左、右及び上中央の少なくとも3箇所にターゲット14C・14L・14Rを取り付け、そのそれぞれについて、トータルステーション1で自動追尾してトンネル中心からの距離Rpを測量し、その測量した距離Rpと予め入力した支保工の設計値Rtとを、エレクタコントローラ6において、予め入力したターゲットの設置高さHp分を差し引いて比較して、その誤差をモニタ5に表示し、誤差が設定以下になるようにエレクタ装置4にて支保工を調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、トンネル断面を支保する支保工をトータルステーション(レーザ光による測距・測角儀)を用いて測量しながら建て込む、支保工建て込み方法及び支保工建て込みシステムに関する。
【背景技術】
【0002】
従来の一般的な支保工建て込み方法は、図10(A)に示すように、直進するレーザ光51をトンネルの後方から基準線として照射し、そのレーザ光51に作業員が定規52を当てて、建て込む支保工53のトンネル断面方向の離れHを目測し、レーザ光51に沿って支保工53を設置していた。
【0003】
しかし、このような方法では、トンネル曲線部や、レーザ光の照射方向がトンネル線形と平行でない場合等において、レーザ光と支保工との間の距離が変化するため、そのずれ量を計算し、計算結果に従って設置しなければならない煩わしさがあった。
【0004】
近年は、レーザ照射装置をモータ制御し、トンネル曲線部でもレーザ光と支保工とが一定の間隔を保つようにする、自動レーザマーキングシステムも登場している。
【0005】
しかし、鋼製支保工の場合、その前後をタイロッドという金具で締結するが、予定設置間隔とのずれが生じた場合も、その金具の長さを現場で修正することはそもそも難しく、通常、支保工は、トンネル進行方向の誤差を残したまま設置される。図10(A)の方法では、レーザ光51とトンネル線形とが平行でない場合、レーザ光51と支保工53の間隔が一定になるようにしても、同図(B)に示すように、トンネルの計画断面そのものからは外れてしまっている場合が多数発生した。
【0006】
このようなことを避けるには、切羽近くの支保工について、トンネル進行方向の数値を測量し、その数値に従って自動レーザマーキングシステムを動作させる必要があるが、多大な手間が必要で、その測量作業には、上記のように定規を使って離れを目測する場合と同様に、切羽崩落などの危険が伴う。
【0007】
一方、特許文献1(特許第3381606号公報)には次のような方法が開示されている。この従来方法は、円弧状に分割された左右一対の支保工を中央部で相互に連結するように切羽に設置して、アーチ状のトンネル支保工を建て込む場合に、支保工を着脱可能に保持して回転させるとともに、支保工を切羽に向けて移動させるエレクター装置を備えた作業車を用い、この作業車に設置した左右一対のターゲットを座標既知地点からレーザ測距機によりそれぞれ視準して、その設置座標値を求め、求められた設置座標値とこれから設置すべき支保工の既知設置座標値とに基づいて、エレクター装置の移動量を設定する。
【0008】
しかし、この従来方法は、一対のターゲットを、支保工自体ではなく、これを保持するエレクター装置を備えた作業車、例えば、左右一対の支保工をそれぞれ保持するエレクター装置の左右一対のハンドの側面に設置するため、ターゲットを支保工毎に取り付ける必要はないが、支保工をハンドにより毎回同じ条件で保持することは非常に難しく、必ずムラがあるとともに、支保工がハンドからずれることがあるため、ターゲットの位置と支保工の実際の位置との位置関係が固定しない。従って、ターゲットの位置が支保工毎に大きく異なったり、途中でずれてしまうため、レーザ測距機より測量したターゲットの設置座標値が支保工の実際の位置と対応せず、支保工の設置位置が大きくずれるという問題がある。
【0009】
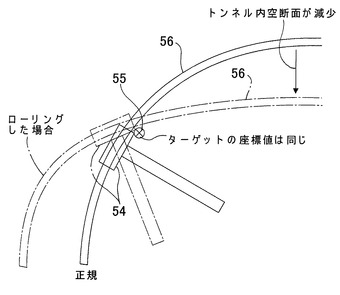
また、図11に示すように、各ハンド54に設置されたターゲット55は、左右の支保工56のそれぞれについて1個ずつとなるため、支保工55が傾いていたり、実線で示す正規の姿勢から、破線で示すように、角度をもって周方向にローリングしている場合には、ターゲット55の測量座標値がローリングに影響されずに正しい値であっても、所定のトンネル内空断面を確保できなくなる(トンネル中心から見て、設計通りのアーチ形断面とならない)。
【特許文献1】特許第3381606号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
本発明の課題は、上記のような問題点に鑑み、ターゲットの座標が、建て込む支保工の実際の位置とずれないようにするとともに、支保工が傾いたりローリングしても、所定のトンネル内空断面を確保できる、誤差の無い正確な建て込みを実現でき、しかも、ターゲットの設置作業が容易であるに加え、切羽まで出向いて支保工の設置状況を逐次点検しなくとも、エレクタ装置の操縦席に座ったまま、ターゲットの自動追尾測量により支保工の移動をリアルタイムで常時監視しながらその設置位置を調整でき、精度と作業性と経済性と安全性の優れた支保工建て込み方法及び支保工建て込みシステムを提供することにある。
【課題を解決するための手段】
【0011】
本発明の支保工建て込み方法では、建て込む支保工の左、右及び上中央(天端)の少なくとも3箇所にターゲットを取り付け、支保工を建て込むエレクタ装置にモニタ及び該モニタの表示を制御できるエレクタコントローラを搭載し、ターゲットを自動追尾するトータルステーションを所定地点に設置し、エレクタコントローラに、支保工の設計値Rtと支保工に対するターゲットの設置高さHpとを予め入力し、トータルステーションを制御するトータルステーションコントローラとエレクタコントローラとの間を、エレクタコントローラ側からトータルステーションコントローラを介してトータルステーションを遠隔操作可能に無線接続し、3箇所のターゲットのそれぞれについて、トータルステーションで自動追尾してトンネル中心からの距離Rpを測量し、その測量した距離Rpと予め入力した支保工の設計値Rtとを、エレクタコントローラにおいて、予め入力したターゲットの設置高さHp分を差し引いて比較して、その誤差をモニタに表示し、誤差が設定以下になるようにエレクタ装置にて支保工を調整する。
【0012】
本発明の支保工建て込みシステムは、建て込む支保工の左、右及び上中央の少なくとも3箇所に取り付けられるターゲットと、該ターゲットを自動追尾して測量するトータルステーションと、該トータルステーションを制御するトータルステーションコントローラと、支保工を建て込むエレクタ装置に搭載されたモニタと、エレクタ装置に搭載されて該モニタの表示を制御できるとともに、トータルステーションコントローラと無線接続され、該トータルステーションコントローラを介してトータルステーションを遠隔操作可能なエレクタコントローラとからなり、このエレクタコントローラには、支保工の設計値Rtと支保工に対するターゲットの設置高さHpとが入力され、3箇所のターゲットのそれぞれについて、トータルステーションで自動追尾してトンネル中心からの距離Rpが測量されると、その測量した距離Rpと入力された支保工の設計値Rtとが、エレクタコントローラにおいて、入力されたターゲットの設置高さHp分を差し引いて比較され、その誤差がモニタに表示されるようになっている。
【0013】
次のような具体的形態がある。
支保工を固定した後の最終のターゲット測量データを、エレクタコントローラに記録する。
【0014】
エレクタコントローラへ入力した支保工の設計値に基づいて、支保工の設計線をモニタ上に表示しながら、トータルステーションで測量した測量値に基づく支保工の現在位置を、支保工の設計線に対して誤差分だけずらしてモニタ上に同時に表示する。
【0015】
ターゲットは、支保工の円弧内面のターゲットポイントに着脱自在に取り付ける。
【0016】
支保工が鋼製で、ターゲットが磁石を有するホルダに保持されたプリズムであり、該ホルダの磁石によりプリズムを支保工に着脱自在に取り付けることができるようになっている。
【発明の効果】
【0017】
本発明によれば次のような効果がある。
ターゲットを、建て込む支保工自体に、しかもその左、右及び上中央の少なくとも3箇所に取り付け、トータルステーションで自動追尾して測量するので、支保工が傾いたりローリングしても、所定のトンネル内空断面を確保でき、トンネル中心からの距離(半径)が全周にわたり設計通りとなる、誤差の無い支保工を施工できる。
エレクタ装置にモニタ及び該モニタの表示を制御できるエレクタコントローラを搭載し、エレクタコントローラ側からトータルステーションコントローラを介してトータルステーションを無線で遠隔操作して、測量値をモニタに表示するので、エレクタ装置の操縦席に座ったまま、ターゲットの自動追尾測量により支保工の移動をリアルタイムで常時監視しながらその設置位置を作業性良く安全に調整できる。
エレクタコントローラに支保工の設計値Rtと支保工に対するターゲットの設置高さHpとを予め入力し、3箇所のターゲットのそれぞれについて、トータルステーションで自動追尾してトンネル中心からの距離Rpを測量し、その測量した距離Rpと予め入力した支保工の設計値Rtとを、エレクタコントローラにおいて、予め入力したターゲットの設置高さHp分を差し引いて比較して、その誤差をモニタに表示し、誤差が設定以下になるようにエレクタ装置にて支保工を調整するので、誤差の無い正確な建て込みを熟練を要することなく経済的に実現できる。
【0018】
支保工を固定した後の最終のターゲット測量データを、エレクタコントローラに記録すると、支保工の設置履歴を知ることができる。
【0019】
エレクタコントローラへ入力した支保工の設計値に基づいて、支保工の設計線をモニタ上に表示しながら、トータルステーションで測量した測量値に基づく支保工の現在位置を、支保工の設計線に対して誤差分だけずらしてモニタ上に同時に表示すると、支保工のずれをビジュアルに捉えながら、そのずれを適切に無くすように調整できる。
【0020】
支保工に予め標示されたターゲットポイントにターゲットを着脱自在に取り付ければ、未熟な切羽作業員でも、ターゲットポイントを目印にターゲットを正確に支保工にセットできる。
【0021】
プリズムをターゲットとして、そのホルダに備えた磁石にて鋼製支保工に取り付けるようにすると、ターゲットの着脱が容易である。
従って、レーザ光からの離れを定規を使って目測していた従来例に比べ、切羽直下での作業を大幅に減らし、作業員の安全性を充分に確保できる。
【発明を実施するための最良の形態】
【0022】
次に、本発明の実施例を図面に基づいて詳細に説明する。
【実施例】
【0023】
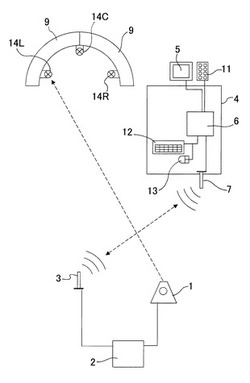
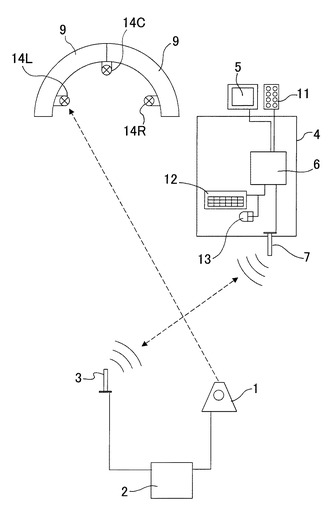
図1に本発明の実施例のシステム構成の概要を示す。この支保工建て込みシステムは、レーザ光による測距・測角儀である自動追尾型トータルステーション1と、これを制御するトータルステーションコントローラ2と、トータルステーションコントローラ2の無線による送受信を可能とするトータルステーション側アンテナ3と、支保工を建て込む自走式のエレクタ装置4と、その操縦席に搭載されたディスプレイ装置であるモニタ5と、エレクタ装置4に搭載され、エレクタ装置4ばかりでなくモニタ5の表示も制御できるエレクタコントローラ6と、このエレクタコントローラ6とトータルステーションコントローラ2との間で無線送受信を行うために、エレクタ装置4に搭載されたエレクタ側アンテナ7とで構成される。
【0024】
トータルステーション1は、レーザ光を照射してターゲットを自動追尾し、その測距・測角を行う公知の構造で、トンネル内の既知の地点に設置する。本発明では、切羽に建て込む支保工自体にターゲットを取り付け、しかも支保工の移動に伴いターゲットを自動追尾することから、そのようなターゲット自動追尾動作に障害が無いところを選んで設置する。従って、トンネル床面に設置するよりも、天井部に架台を架設して、トータルステーション1を架台上に設置するのが好ましい。さらに、その架台を、天井部に架設したレールに沿って移動可能とすれば、トータルステーション1の盛り替えが容易となる。
【0025】
トータルステーションコントローラ2は、携帯できるコンピュータを含み、そのコンピュータに組み込まれたソフトウェアによってトータルステーション1の各種の機構を自動制御できるようになっているとともに、トータルステーション1の測定データを処理できるようになっている。さらに、トータルステーションコントローラ2は、エレクタコントローラ6側との無線通信により、データの送受信が可能であるとともに、エレクタコントローラ6側からの指令によりトータルステーション1の各種の機構を無線遠隔操作できるようになっている。
【0026】
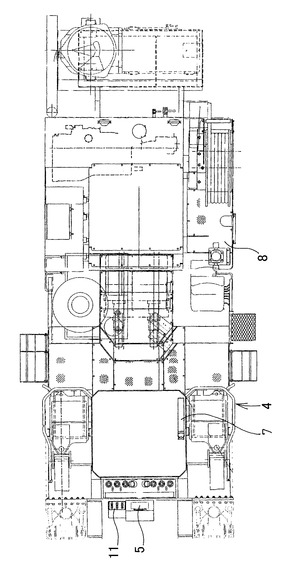
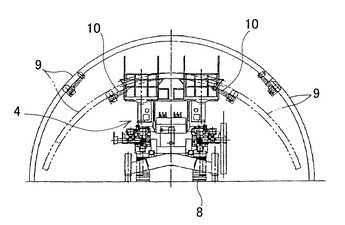
エレクタ装置4は、図2及び図3に示すように、作業台車8に搭載され、左右の支保工9を左右のハンド10でそれぞれ保持して移動させることができる公知の構造で、その操縦席に、モニタ5とエレクタコントローラ6と操作盤(スイッチボックス)11が設置されている。
【0027】
エレクタコントローラ6はコンピュータを含み、そのコンピュータに組み込まれたソフトウェアにより、エレクタ装置4を操作盤11で操縦できるようになっているとともに、キーボード12とポインティングデバイス13を用いてモニタ5の表示を制御できるようになっている。
【0028】
左右の支保工9は、図4に示すように、左右対称な円弧状で、鋼製であり、これらを切羽で組み立ててアーチ形の支保工とする。そのアーチの上中央(天端)と、アーチの両端に近い左右2点との3箇所をターゲットポイントとするため、支保工9の内周面には、その3箇所に相当する位置にターゲットポイントとなる印が予めペンキ等で標示されており、これら3箇所のターゲットポイントを目印として、作業者がターゲット14C・14L・14Rを支保工9の内周面に着脱自在に取り付けるようになっている。
【0029】
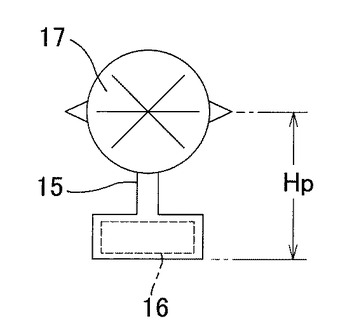
ターゲット14C・14L・14Rとしては、図5に示すように、ホルダ15の基端部に磁石16を備え、ホルダ16の先端にプリズム17を取り付けた共通のものを使用する。従って、ターゲット14C・14L・14Rは、鋼製の支保工9の内周面に対して磁石16の磁力により着脱自在で、支保工9に対する設置高さHpは一定となる。
【0030】
次に、本発明による支保工建て込み方法の手順を図6のフローチャートに従って説明する。
【0031】
支保工建て込みを行う前に、建て込み位置を掘削する。その場合、トータルステーション1からのレーザ光で掘削位置を正確に指示し、ロードヘッダやブレーカなどで地山を掘削する。
【0032】
図6において、トータルステーションコントローラ2を所定地点に設置し(ステップS1)、支保工9の内周面の3箇所(天端、左側及び右側)にターゲット14C・14L・134を上記のように取り付け(ステップS2)、エレクタ装置4で左右の支保工9を組み立てて切羽に設置する(ステップS3)。
【0033】
一方、初期設定として、キーボード12からエレクタコントローラ6へ、ターゲットであるプリズム17の設置高さHpを入力(ステップS4)、支保工設計値Rtを入力(ステップS5)、管理基準値Roを入力(ステップS6)する。ここで、支保工設計値Rtとは、図4に示すように、トンネル中心を基準点とした支保工の設計半径、管理基準値Roとは、支保工設計値Rtに対する現実の支保工の許容誤差のことである。
【0034】
初期設定後、エレクタコントローラ6側からの指令により、トータルステーションコントローラ2を介してトータルステーション1を無線遠隔操作し、3箇所のターゲット14C・14L・14Rのそれぞれについて自動追尾して、各ターゲットの座標を順次自動測量し、その測量データをトータルステーションコントローラ2側からエレクタコントローラ6へ順次無線送信する。これを受信したエレクタコントローラ6では、3箇所のターゲット14C・14L・14Rのそれぞれについて、トンネル中心からの距離Rpを演算し、さらに、この距離Rpと支保工設計値Rtとを比較して、その誤差を算出する(ステップS7)。
【0035】
このような動作は、トータルステーション1が各ターゲット14C・14L・14Rを個別に自動追尾するため、各ターゲット14C・14L・14Rの移動に伴いリアルタイムで行われ、現在のトンネル中心からの距離Rpと誤差が時々刻々に演算され、その変化がモニタ5にリアルタイムで表示されるようになっているので、エレクタ装置4の操縦者は、その表示を見ながらハンド10を動かして支保工9の位置を調整する(ステップS8)。
【0036】
図7にモニタ5の画面例を示す。エレクタコントローラ6へ入力された支保工設計値Rtに基づいて、支保工の設計線18がトンネル中心を基準点とした画面19に表示されるとともに、現に測量中のターゲット14C・14L・14Rについての測点19が、上記のようにして測量したトンネル中心からの距離Rpに基づいて、その画面19上に同時に表示される。上記のようにして演算された誤差は、設計線18に対する測点20のずれとして表示され、そのずれ部分を別画面21にして拡大表示できるとともに、ずれの内外の方向及び数値も表示され、さらに、許容誤差である管理基準値Ro内に入っているかどうかが、視認し易いグラフ形式でも別画面22にして表示される。
【0037】
これらの表示は、ターゲット14C・14L・14Rの移動に伴って変化するので、エレクタ装置4の操縦者は、図6のステップS9〜S11に示すように、3箇所のターゲット14C・14L・14Rの全てについて、ずれ(誤差)が許容誤差である管理基準値Ro内に入るように(0<(Rp+Hp−Rt)<Ro)、モニタ5の画面を見ながら支保工9の位置を調整する(ステップS8)。
【0038】
ここで、支保工9は、上中央のターゲット14Cと、左右のターゲット14L・14Rとによる3点の位置を測量されることになる。
【0039】
ターゲットが1点で、それを水平面を基準とした上下方向の距離として測量した場合には、ターゲットの上下方向の設置誤差がそのまま支保工の設置誤差となる。
【0040】
また、支保工の建て込み作業では、切羽作業員が支保工の所定箇所にターゲットを常に正確に設置することは難しい。さらに、作業上避けられない衝撃や振動等の影響でターゲットの設置位置がずれることがある。このような人為的及び不慮のずれは、周方向に数cmのオーダーで生ずることは、どうしても避けられない。
【0041】
さらにまた、前述のように、鋼製のアーチ支保工の場合には、建て込み作業中に、支保工が水平面に対し角度を持ちながら周方向にローリングすることが多いため、測量座標値は正確でも、支保工が計画断面におさまらないことがある。
【0042】
これに対して、周方向に離れた3点について、トンネル中心からの距離として測量すると、ターゲット14C・14L・14Rの設置位置が、支保工9に予め標示してあるターゲットポイントより周方向に数cmのオーダーでずれていても、その誤差を管理する管理基準値Roとしては、数mm(例えば、5mm)程度で済み、しかも、支保工9が傾いていたりローリングしても、トンネル中心からの距離を上中央と左右の3点で正確に把握できるので、設計通りのトンネル内空断面を確保でき、支保工施工精度の飛躍的向上が図れる。
【0043】
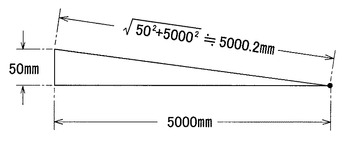
例えば、図9に示すように、支保工9の設計半径を5000mm(5m)、ターゲットポイントよりの設置誤差を目視で50mm(5cm)とした場合、トンネル中心からの距離で見ると、約5000.2mmとなり、誤差は約0.2mmで、支保工8によるトンネルの内空半径にはほとんど影響しない。
【0044】
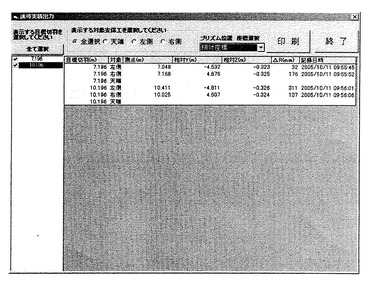
3箇所のターゲット14C・14L・14Rの全てについて、誤差が管理基準値Ro以下となって支保工9の位置調整が終了したら、コンクート吹き付けを行って支保工9を固定する(ステップS12)。その後、最終のチェック測量を行い(ステップS13)、支保工8を固定した後の最終の3箇所のターゲット測量データ(Rp+Hp)を、エレクタコントローラ6に記録する(ステップS14)。その履歴は、図8のようにモニタ5に表示できるようになっている。その記録中から、次回の支保工のための初期位置情報として取り出すことが可能で、支保工変形がある場合の初期データとして利用できるようになっている。
【0045】
エレクタ装置4を切羽から後退させると(ステップS15)、作業は終了する。
【0046】
なお、上記の実施例では、ターゲットを支保工9の上中央(天端)と左右両側の3箇所に設置したが、その設置位置を4箇所以上としても構わない。
【図面の簡単な説明】
【0047】
【図1】本発明の実施例のシステム構成図である。
【図2】エレクタ装置の一例の平面図である。
【図3】その背面図である。
【図4】支保工とターゲットの関係を示す正面図である。
【図5】ターゲットの正面図である。
【図6】本発明の方法の手順を示すフローチャートである。
【図7】モニタの画面例である。
【図8】ターゲット測量データの履歴表示例である。
【図9】支保工の誤差を示す解説図である。
【図10】従来例の解説図で、(A)は正面図、(B)は平面図である。
【図11】特許文献1に記載された方法による場合の解説図である。
【符号の説明】
【0048】
1 トータルステーション
2 トータルステーションコントローラ
3 トータルステーション側アンテナ
4 エレクタ装置
5 モニタ
6 エレクタコントローラ
7 エレクタ側アンテナ
8 作業台車
9 支保工
10 ハンド
11 操作盤
12 キーボード
13 ポインティングデバイス
14C・14L・14R ターゲット
15 ホルダ
16 磁石
17 プリズム
18 支保工の設計線
19・21・22 画面
20 測点
【技術分野】
【0001】
本発明は、トンネル断面を支保する支保工をトータルステーション(レーザ光による測距・測角儀)を用いて測量しながら建て込む、支保工建て込み方法及び支保工建て込みシステムに関する。
【背景技術】
【0002】
従来の一般的な支保工建て込み方法は、図10(A)に示すように、直進するレーザ光51をトンネルの後方から基準線として照射し、そのレーザ光51に作業員が定規52を当てて、建て込む支保工53のトンネル断面方向の離れHを目測し、レーザ光51に沿って支保工53を設置していた。
【0003】
しかし、このような方法では、トンネル曲線部や、レーザ光の照射方向がトンネル線形と平行でない場合等において、レーザ光と支保工との間の距離が変化するため、そのずれ量を計算し、計算結果に従って設置しなければならない煩わしさがあった。
【0004】
近年は、レーザ照射装置をモータ制御し、トンネル曲線部でもレーザ光と支保工とが一定の間隔を保つようにする、自動レーザマーキングシステムも登場している。
【0005】
しかし、鋼製支保工の場合、その前後をタイロッドという金具で締結するが、予定設置間隔とのずれが生じた場合も、その金具の長さを現場で修正することはそもそも難しく、通常、支保工は、トンネル進行方向の誤差を残したまま設置される。図10(A)の方法では、レーザ光51とトンネル線形とが平行でない場合、レーザ光51と支保工53の間隔が一定になるようにしても、同図(B)に示すように、トンネルの計画断面そのものからは外れてしまっている場合が多数発生した。
【0006】
このようなことを避けるには、切羽近くの支保工について、トンネル進行方向の数値を測量し、その数値に従って自動レーザマーキングシステムを動作させる必要があるが、多大な手間が必要で、その測量作業には、上記のように定規を使って離れを目測する場合と同様に、切羽崩落などの危険が伴う。
【0007】
一方、特許文献1(特許第3381606号公報)には次のような方法が開示されている。この従来方法は、円弧状に分割された左右一対の支保工を中央部で相互に連結するように切羽に設置して、アーチ状のトンネル支保工を建て込む場合に、支保工を着脱可能に保持して回転させるとともに、支保工を切羽に向けて移動させるエレクター装置を備えた作業車を用い、この作業車に設置した左右一対のターゲットを座標既知地点からレーザ測距機によりそれぞれ視準して、その設置座標値を求め、求められた設置座標値とこれから設置すべき支保工の既知設置座標値とに基づいて、エレクター装置の移動量を設定する。
【0008】
しかし、この従来方法は、一対のターゲットを、支保工自体ではなく、これを保持するエレクター装置を備えた作業車、例えば、左右一対の支保工をそれぞれ保持するエレクター装置の左右一対のハンドの側面に設置するため、ターゲットを支保工毎に取り付ける必要はないが、支保工をハンドにより毎回同じ条件で保持することは非常に難しく、必ずムラがあるとともに、支保工がハンドからずれることがあるため、ターゲットの位置と支保工の実際の位置との位置関係が固定しない。従って、ターゲットの位置が支保工毎に大きく異なったり、途中でずれてしまうため、レーザ測距機より測量したターゲットの設置座標値が支保工の実際の位置と対応せず、支保工の設置位置が大きくずれるという問題がある。
【0009】
また、図11に示すように、各ハンド54に設置されたターゲット55は、左右の支保工56のそれぞれについて1個ずつとなるため、支保工55が傾いていたり、実線で示す正規の姿勢から、破線で示すように、角度をもって周方向にローリングしている場合には、ターゲット55の測量座標値がローリングに影響されずに正しい値であっても、所定のトンネル内空断面を確保できなくなる(トンネル中心から見て、設計通りのアーチ形断面とならない)。
【特許文献1】特許第3381606号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
本発明の課題は、上記のような問題点に鑑み、ターゲットの座標が、建て込む支保工の実際の位置とずれないようにするとともに、支保工が傾いたりローリングしても、所定のトンネル内空断面を確保できる、誤差の無い正確な建て込みを実現でき、しかも、ターゲットの設置作業が容易であるに加え、切羽まで出向いて支保工の設置状況を逐次点検しなくとも、エレクタ装置の操縦席に座ったまま、ターゲットの自動追尾測量により支保工の移動をリアルタイムで常時監視しながらその設置位置を調整でき、精度と作業性と経済性と安全性の優れた支保工建て込み方法及び支保工建て込みシステムを提供することにある。
【課題を解決するための手段】
【0011】
本発明の支保工建て込み方法では、建て込む支保工の左、右及び上中央(天端)の少なくとも3箇所にターゲットを取り付け、支保工を建て込むエレクタ装置にモニタ及び該モニタの表示を制御できるエレクタコントローラを搭載し、ターゲットを自動追尾するトータルステーションを所定地点に設置し、エレクタコントローラに、支保工の設計値Rtと支保工に対するターゲットの設置高さHpとを予め入力し、トータルステーションを制御するトータルステーションコントローラとエレクタコントローラとの間を、エレクタコントローラ側からトータルステーションコントローラを介してトータルステーションを遠隔操作可能に無線接続し、3箇所のターゲットのそれぞれについて、トータルステーションで自動追尾してトンネル中心からの距離Rpを測量し、その測量した距離Rpと予め入力した支保工の設計値Rtとを、エレクタコントローラにおいて、予め入力したターゲットの設置高さHp分を差し引いて比較して、その誤差をモニタに表示し、誤差が設定以下になるようにエレクタ装置にて支保工を調整する。
【0012】
本発明の支保工建て込みシステムは、建て込む支保工の左、右及び上中央の少なくとも3箇所に取り付けられるターゲットと、該ターゲットを自動追尾して測量するトータルステーションと、該トータルステーションを制御するトータルステーションコントローラと、支保工を建て込むエレクタ装置に搭載されたモニタと、エレクタ装置に搭載されて該モニタの表示を制御できるとともに、トータルステーションコントローラと無線接続され、該トータルステーションコントローラを介してトータルステーションを遠隔操作可能なエレクタコントローラとからなり、このエレクタコントローラには、支保工の設計値Rtと支保工に対するターゲットの設置高さHpとが入力され、3箇所のターゲットのそれぞれについて、トータルステーションで自動追尾してトンネル中心からの距離Rpが測量されると、その測量した距離Rpと入力された支保工の設計値Rtとが、エレクタコントローラにおいて、入力されたターゲットの設置高さHp分を差し引いて比較され、その誤差がモニタに表示されるようになっている。
【0013】
次のような具体的形態がある。
支保工を固定した後の最終のターゲット測量データを、エレクタコントローラに記録する。
【0014】
エレクタコントローラへ入力した支保工の設計値に基づいて、支保工の設計線をモニタ上に表示しながら、トータルステーションで測量した測量値に基づく支保工の現在位置を、支保工の設計線に対して誤差分だけずらしてモニタ上に同時に表示する。
【0015】
ターゲットは、支保工の円弧内面のターゲットポイントに着脱自在に取り付ける。
【0016】
支保工が鋼製で、ターゲットが磁石を有するホルダに保持されたプリズムであり、該ホルダの磁石によりプリズムを支保工に着脱自在に取り付けることができるようになっている。
【発明の効果】
【0017】
本発明によれば次のような効果がある。
ターゲットを、建て込む支保工自体に、しかもその左、右及び上中央の少なくとも3箇所に取り付け、トータルステーションで自動追尾して測量するので、支保工が傾いたりローリングしても、所定のトンネル内空断面を確保でき、トンネル中心からの距離(半径)が全周にわたり設計通りとなる、誤差の無い支保工を施工できる。
エレクタ装置にモニタ及び該モニタの表示を制御できるエレクタコントローラを搭載し、エレクタコントローラ側からトータルステーションコントローラを介してトータルステーションを無線で遠隔操作して、測量値をモニタに表示するので、エレクタ装置の操縦席に座ったまま、ターゲットの自動追尾測量により支保工の移動をリアルタイムで常時監視しながらその設置位置を作業性良く安全に調整できる。
エレクタコントローラに支保工の設計値Rtと支保工に対するターゲットの設置高さHpとを予め入力し、3箇所のターゲットのそれぞれについて、トータルステーションで自動追尾してトンネル中心からの距離Rpを測量し、その測量した距離Rpと予め入力した支保工の設計値Rtとを、エレクタコントローラにおいて、予め入力したターゲットの設置高さHp分を差し引いて比較して、その誤差をモニタに表示し、誤差が設定以下になるようにエレクタ装置にて支保工を調整するので、誤差の無い正確な建て込みを熟練を要することなく経済的に実現できる。
【0018】
支保工を固定した後の最終のターゲット測量データを、エレクタコントローラに記録すると、支保工の設置履歴を知ることができる。
【0019】
エレクタコントローラへ入力した支保工の設計値に基づいて、支保工の設計線をモニタ上に表示しながら、トータルステーションで測量した測量値に基づく支保工の現在位置を、支保工の設計線に対して誤差分だけずらしてモニタ上に同時に表示すると、支保工のずれをビジュアルに捉えながら、そのずれを適切に無くすように調整できる。
【0020】
支保工に予め標示されたターゲットポイントにターゲットを着脱自在に取り付ければ、未熟な切羽作業員でも、ターゲットポイントを目印にターゲットを正確に支保工にセットできる。
【0021】
プリズムをターゲットとして、そのホルダに備えた磁石にて鋼製支保工に取り付けるようにすると、ターゲットの着脱が容易である。
従って、レーザ光からの離れを定規を使って目測していた従来例に比べ、切羽直下での作業を大幅に減らし、作業員の安全性を充分に確保できる。
【発明を実施するための最良の形態】
【0022】
次に、本発明の実施例を図面に基づいて詳細に説明する。
【実施例】
【0023】
図1に本発明の実施例のシステム構成の概要を示す。この支保工建て込みシステムは、レーザ光による測距・測角儀である自動追尾型トータルステーション1と、これを制御するトータルステーションコントローラ2と、トータルステーションコントローラ2の無線による送受信を可能とするトータルステーション側アンテナ3と、支保工を建て込む自走式のエレクタ装置4と、その操縦席に搭載されたディスプレイ装置であるモニタ5と、エレクタ装置4に搭載され、エレクタ装置4ばかりでなくモニタ5の表示も制御できるエレクタコントローラ6と、このエレクタコントローラ6とトータルステーションコントローラ2との間で無線送受信を行うために、エレクタ装置4に搭載されたエレクタ側アンテナ7とで構成される。
【0024】
トータルステーション1は、レーザ光を照射してターゲットを自動追尾し、その測距・測角を行う公知の構造で、トンネル内の既知の地点に設置する。本発明では、切羽に建て込む支保工自体にターゲットを取り付け、しかも支保工の移動に伴いターゲットを自動追尾することから、そのようなターゲット自動追尾動作に障害が無いところを選んで設置する。従って、トンネル床面に設置するよりも、天井部に架台を架設して、トータルステーション1を架台上に設置するのが好ましい。さらに、その架台を、天井部に架設したレールに沿って移動可能とすれば、トータルステーション1の盛り替えが容易となる。
【0025】
トータルステーションコントローラ2は、携帯できるコンピュータを含み、そのコンピュータに組み込まれたソフトウェアによってトータルステーション1の各種の機構を自動制御できるようになっているとともに、トータルステーション1の測定データを処理できるようになっている。さらに、トータルステーションコントローラ2は、エレクタコントローラ6側との無線通信により、データの送受信が可能であるとともに、エレクタコントローラ6側からの指令によりトータルステーション1の各種の機構を無線遠隔操作できるようになっている。
【0026】
エレクタ装置4は、図2及び図3に示すように、作業台車8に搭載され、左右の支保工9を左右のハンド10でそれぞれ保持して移動させることができる公知の構造で、その操縦席に、モニタ5とエレクタコントローラ6と操作盤(スイッチボックス)11が設置されている。
【0027】
エレクタコントローラ6はコンピュータを含み、そのコンピュータに組み込まれたソフトウェアにより、エレクタ装置4を操作盤11で操縦できるようになっているとともに、キーボード12とポインティングデバイス13を用いてモニタ5の表示を制御できるようになっている。
【0028】
左右の支保工9は、図4に示すように、左右対称な円弧状で、鋼製であり、これらを切羽で組み立ててアーチ形の支保工とする。そのアーチの上中央(天端)と、アーチの両端に近い左右2点との3箇所をターゲットポイントとするため、支保工9の内周面には、その3箇所に相当する位置にターゲットポイントとなる印が予めペンキ等で標示されており、これら3箇所のターゲットポイントを目印として、作業者がターゲット14C・14L・14Rを支保工9の内周面に着脱自在に取り付けるようになっている。
【0029】
ターゲット14C・14L・14Rとしては、図5に示すように、ホルダ15の基端部に磁石16を備え、ホルダ16の先端にプリズム17を取り付けた共通のものを使用する。従って、ターゲット14C・14L・14Rは、鋼製の支保工9の内周面に対して磁石16の磁力により着脱自在で、支保工9に対する設置高さHpは一定となる。
【0030】
次に、本発明による支保工建て込み方法の手順を図6のフローチャートに従って説明する。
【0031】
支保工建て込みを行う前に、建て込み位置を掘削する。その場合、トータルステーション1からのレーザ光で掘削位置を正確に指示し、ロードヘッダやブレーカなどで地山を掘削する。
【0032】
図6において、トータルステーションコントローラ2を所定地点に設置し(ステップS1)、支保工9の内周面の3箇所(天端、左側及び右側)にターゲット14C・14L・134を上記のように取り付け(ステップS2)、エレクタ装置4で左右の支保工9を組み立てて切羽に設置する(ステップS3)。
【0033】
一方、初期設定として、キーボード12からエレクタコントローラ6へ、ターゲットであるプリズム17の設置高さHpを入力(ステップS4)、支保工設計値Rtを入力(ステップS5)、管理基準値Roを入力(ステップS6)する。ここで、支保工設計値Rtとは、図4に示すように、トンネル中心を基準点とした支保工の設計半径、管理基準値Roとは、支保工設計値Rtに対する現実の支保工の許容誤差のことである。
【0034】
初期設定後、エレクタコントローラ6側からの指令により、トータルステーションコントローラ2を介してトータルステーション1を無線遠隔操作し、3箇所のターゲット14C・14L・14Rのそれぞれについて自動追尾して、各ターゲットの座標を順次自動測量し、その測量データをトータルステーションコントローラ2側からエレクタコントローラ6へ順次無線送信する。これを受信したエレクタコントローラ6では、3箇所のターゲット14C・14L・14Rのそれぞれについて、トンネル中心からの距離Rpを演算し、さらに、この距離Rpと支保工設計値Rtとを比較して、その誤差を算出する(ステップS7)。
【0035】
このような動作は、トータルステーション1が各ターゲット14C・14L・14Rを個別に自動追尾するため、各ターゲット14C・14L・14Rの移動に伴いリアルタイムで行われ、現在のトンネル中心からの距離Rpと誤差が時々刻々に演算され、その変化がモニタ5にリアルタイムで表示されるようになっているので、エレクタ装置4の操縦者は、その表示を見ながらハンド10を動かして支保工9の位置を調整する(ステップS8)。
【0036】
図7にモニタ5の画面例を示す。エレクタコントローラ6へ入力された支保工設計値Rtに基づいて、支保工の設計線18がトンネル中心を基準点とした画面19に表示されるとともに、現に測量中のターゲット14C・14L・14Rについての測点19が、上記のようにして測量したトンネル中心からの距離Rpに基づいて、その画面19上に同時に表示される。上記のようにして演算された誤差は、設計線18に対する測点20のずれとして表示され、そのずれ部分を別画面21にして拡大表示できるとともに、ずれの内外の方向及び数値も表示され、さらに、許容誤差である管理基準値Ro内に入っているかどうかが、視認し易いグラフ形式でも別画面22にして表示される。
【0037】
これらの表示は、ターゲット14C・14L・14Rの移動に伴って変化するので、エレクタ装置4の操縦者は、図6のステップS9〜S11に示すように、3箇所のターゲット14C・14L・14Rの全てについて、ずれ(誤差)が許容誤差である管理基準値Ro内に入るように(0<(Rp+Hp−Rt)<Ro)、モニタ5の画面を見ながら支保工9の位置を調整する(ステップS8)。
【0038】
ここで、支保工9は、上中央のターゲット14Cと、左右のターゲット14L・14Rとによる3点の位置を測量されることになる。
【0039】
ターゲットが1点で、それを水平面を基準とした上下方向の距離として測量した場合には、ターゲットの上下方向の設置誤差がそのまま支保工の設置誤差となる。
【0040】
また、支保工の建て込み作業では、切羽作業員が支保工の所定箇所にターゲットを常に正確に設置することは難しい。さらに、作業上避けられない衝撃や振動等の影響でターゲットの設置位置がずれることがある。このような人為的及び不慮のずれは、周方向に数cmのオーダーで生ずることは、どうしても避けられない。
【0041】
さらにまた、前述のように、鋼製のアーチ支保工の場合には、建て込み作業中に、支保工が水平面に対し角度を持ちながら周方向にローリングすることが多いため、測量座標値は正確でも、支保工が計画断面におさまらないことがある。
【0042】
これに対して、周方向に離れた3点について、トンネル中心からの距離として測量すると、ターゲット14C・14L・14Rの設置位置が、支保工9に予め標示してあるターゲットポイントより周方向に数cmのオーダーでずれていても、その誤差を管理する管理基準値Roとしては、数mm(例えば、5mm)程度で済み、しかも、支保工9が傾いていたりローリングしても、トンネル中心からの距離を上中央と左右の3点で正確に把握できるので、設計通りのトンネル内空断面を確保でき、支保工施工精度の飛躍的向上が図れる。
【0043】
例えば、図9に示すように、支保工9の設計半径を5000mm(5m)、ターゲットポイントよりの設置誤差を目視で50mm(5cm)とした場合、トンネル中心からの距離で見ると、約5000.2mmとなり、誤差は約0.2mmで、支保工8によるトンネルの内空半径にはほとんど影響しない。
【0044】
3箇所のターゲット14C・14L・14Rの全てについて、誤差が管理基準値Ro以下となって支保工9の位置調整が終了したら、コンクート吹き付けを行って支保工9を固定する(ステップS12)。その後、最終のチェック測量を行い(ステップS13)、支保工8を固定した後の最終の3箇所のターゲット測量データ(Rp+Hp)を、エレクタコントローラ6に記録する(ステップS14)。その履歴は、図8のようにモニタ5に表示できるようになっている。その記録中から、次回の支保工のための初期位置情報として取り出すことが可能で、支保工変形がある場合の初期データとして利用できるようになっている。
【0045】
エレクタ装置4を切羽から後退させると(ステップS15)、作業は終了する。
【0046】
なお、上記の実施例では、ターゲットを支保工9の上中央(天端)と左右両側の3箇所に設置したが、その設置位置を4箇所以上としても構わない。
【図面の簡単な説明】
【0047】
【図1】本発明の実施例のシステム構成図である。
【図2】エレクタ装置の一例の平面図である。
【図3】その背面図である。
【図4】支保工とターゲットの関係を示す正面図である。
【図5】ターゲットの正面図である。
【図6】本発明の方法の手順を示すフローチャートである。
【図7】モニタの画面例である。
【図8】ターゲット測量データの履歴表示例である。
【図9】支保工の誤差を示す解説図である。
【図10】従来例の解説図で、(A)は正面図、(B)は平面図である。
【図11】特許文献1に記載された方法による場合の解説図である。
【符号の説明】
【0048】
1 トータルステーション
2 トータルステーションコントローラ
3 トータルステーション側アンテナ
4 エレクタ装置
5 モニタ
6 エレクタコントローラ
7 エレクタ側アンテナ
8 作業台車
9 支保工
10 ハンド
11 操作盤
12 キーボード
13 ポインティングデバイス
14C・14L・14R ターゲット
15 ホルダ
16 磁石
17 プリズム
18 支保工の設計線
19・21・22 画面
20 測点
【特許請求の範囲】
【請求項1】
建て込む支保工の左、右及び上中央の少なくとも3箇所にターゲットを取り付け、支保工を建て込むエレクタ装置にモニタ及び該モニタの表示を制御できるエレクタコントローラを搭載し、前記ターゲットを自動追尾するトータルステーションを所定地点に設置し、前記エレクタコントローラに、支保工の設計値Rtと支保工に対する前記ターゲットの設置高さHpとを予め入力し、前記トータルステーションを制御するトータルステーションコントローラと前記エレクタコントローラとの間を、エレクタコントローラ側からトータルステーションコントローラを介してトータルステーションを遠隔操作可能に無線接続し、前記3箇所のターゲットのそれぞれについて、トータルステーションで自動追尾してトンネル中心からの距離Rpを測量し、その測量した距離Rpと予め入力した支保工の設計値Rtとを、エレクタコントローラにおいて、予め入力したターゲットの設置高さHp分を差し引いて比較して、その誤差を前記モニタに表示し、誤差が設定以下になるように前記エレクタ装置にて支保工を調整することを特徴とする支保工建て込み方法。
【請求項2】
支保工を固定した後の最終のターゲット測量データを、エレクタコントローラに記録することを特徴とする請求項1に記載の支保工建て込み方法。
【請求項3】
エレクタコントローラへ入力した支保工の設計値に基づいて、支保工の設計線をモニタ上に表示しながら、トータルステーションで測量した測量値に基づく支保工の現在位置を、支保工の設計線に対して誤差分だけずらしてモニタ上に同時に表示することを特徴とする請求項1又は2に記載の支保工建て込み方法。
【請求項4】
支保工の円弧内面のターゲットポイントにターゲットを着脱自在に取り付けることを請求項1、2又は3に記載の支保工建て込み方法。
【請求項5】
建て込む支保工の左、右及び上中央の少なくとも3箇所に取り付けられるターゲットと、該ターゲットを自動追尾して測量するトータルステーションと、該トータルステーションを制御するトータルステーションコントローラと、支保工を建て込むエレクタ装置に搭載されたモニタと、エレクタ装置に搭載されて該モニタの表示を制御できるとともに、前記トータルステーションコントローラと無線接続され、該トータルステーションコントローラを介してトータルステーションを遠隔操作可能なエレクタコントローラとからなり、このエレクタコントローラには、支保工の設計値Rtと支保工に対する前記ターゲットの設置高さHpとが入力され、前記3箇所のターゲットのそれぞれについて、トータルステーションで自動追尾してトンネル中心からの距離Rpが測量されると、その測量した距離Rpと入力された支保工の設計値Rtとが、エレクタコントローラにおいて、入力されたターゲットの設置高さHp分を差し引いて比較され、その誤差が前記モニタに表示されるようになっていることを特徴とする支保工建て込みシステム。
【請求項6】
エレクタコントローラは、各支保工を固定する前の最終のターゲット測量データを記録することを特徴とする請求項5に記載の支保工建て込みシステム。
【請求項7】
エレクタコントローラは、入力された支保工の設計値に基づいて、支保工の設計線をモニタ上に表示しながら、トータルステーションで測量した測量値に基づく支保工の現在位置を、支保工の設計線に対して誤差分だけずらしてモニタ上に同時に表示することを特徴とする請求項5又は6に記載の支保工建て込みシステム。
【請求項8】
支保工が鋼製で、ターゲットが磁石を有するホルダに保持されたプリズムであり、該ホルダの磁石によりプリズムを支保工に着脱自在に取り付けることができるようになっていることを特徴とする請求項5、6又は7に記載の支保工建て込みシステム。
【請求項1】
建て込む支保工の左、右及び上中央の少なくとも3箇所にターゲットを取り付け、支保工を建て込むエレクタ装置にモニタ及び該モニタの表示を制御できるエレクタコントローラを搭載し、前記ターゲットを自動追尾するトータルステーションを所定地点に設置し、前記エレクタコントローラに、支保工の設計値Rtと支保工に対する前記ターゲットの設置高さHpとを予め入力し、前記トータルステーションを制御するトータルステーションコントローラと前記エレクタコントローラとの間を、エレクタコントローラ側からトータルステーションコントローラを介してトータルステーションを遠隔操作可能に無線接続し、前記3箇所のターゲットのそれぞれについて、トータルステーションで自動追尾してトンネル中心からの距離Rpを測量し、その測量した距離Rpと予め入力した支保工の設計値Rtとを、エレクタコントローラにおいて、予め入力したターゲットの設置高さHp分を差し引いて比較して、その誤差を前記モニタに表示し、誤差が設定以下になるように前記エレクタ装置にて支保工を調整することを特徴とする支保工建て込み方法。
【請求項2】
支保工を固定した後の最終のターゲット測量データを、エレクタコントローラに記録することを特徴とする請求項1に記載の支保工建て込み方法。
【請求項3】
エレクタコントローラへ入力した支保工の設計値に基づいて、支保工の設計線をモニタ上に表示しながら、トータルステーションで測量した測量値に基づく支保工の現在位置を、支保工の設計線に対して誤差分だけずらしてモニタ上に同時に表示することを特徴とする請求項1又は2に記載の支保工建て込み方法。
【請求項4】
支保工の円弧内面のターゲットポイントにターゲットを着脱自在に取り付けることを請求項1、2又は3に記載の支保工建て込み方法。
【請求項5】
建て込む支保工の左、右及び上中央の少なくとも3箇所に取り付けられるターゲットと、該ターゲットを自動追尾して測量するトータルステーションと、該トータルステーションを制御するトータルステーションコントローラと、支保工を建て込むエレクタ装置に搭載されたモニタと、エレクタ装置に搭載されて該モニタの表示を制御できるとともに、前記トータルステーションコントローラと無線接続され、該トータルステーションコントローラを介してトータルステーションを遠隔操作可能なエレクタコントローラとからなり、このエレクタコントローラには、支保工の設計値Rtと支保工に対する前記ターゲットの設置高さHpとが入力され、前記3箇所のターゲットのそれぞれについて、トータルステーションで自動追尾してトンネル中心からの距離Rpが測量されると、その測量した距離Rpと入力された支保工の設計値Rtとが、エレクタコントローラにおいて、入力されたターゲットの設置高さHp分を差し引いて比較され、その誤差が前記モニタに表示されるようになっていることを特徴とする支保工建て込みシステム。
【請求項6】
エレクタコントローラは、各支保工を固定する前の最終のターゲット測量データを記録することを特徴とする請求項5に記載の支保工建て込みシステム。
【請求項7】
エレクタコントローラは、入力された支保工の設計値に基づいて、支保工の設計線をモニタ上に表示しながら、トータルステーションで測量した測量値に基づく支保工の現在位置を、支保工の設計線に対して誤差分だけずらしてモニタ上に同時に表示することを特徴とする請求項5又は6に記載の支保工建て込みシステム。
【請求項8】
支保工が鋼製で、ターゲットが磁石を有するホルダに保持されたプリズムであり、該ホルダの磁石によりプリズムを支保工に着脱自在に取り付けることができるようになっていることを特徴とする請求項5、6又は7に記載の支保工建て込みシステム。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】

【図7】

【図8】
【図9】
【図10】

【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2007−138427(P2007−138427A)
【公開日】平成19年6月7日(2007.6.7)
【国際特許分類】
【出願番号】特願2005−330175(P2005−330175)
【出願日】平成17年11月15日(2005.11.15)
【出願人】(000201478)前田建設工業株式会社 (358)
【出願人】(394017446)マック株式会社 (7)
【Fターム(参考)】
【公開日】平成19年6月7日(2007.6.7)
【国際特許分類】
【出願日】平成17年11月15日(2005.11.15)
【出願人】(000201478)前田建設工業株式会社 (358)
【出願人】(394017446)マック株式会社 (7)
【Fターム(参考)】
[ Back to top ]