
転写ベルト駆動機構のモデル化方法及びそのモデル化方法を用いた制御系の設計支援方法
【課題】 画像形成装置の転写ベルト駆動機構のモデル化方法において、複雑な解析モデルにならず、設計、解析の時間を短縮することが可能な転写ベルト駆動機構のモデル化方法を提供すること。
【解決手段】 転写ユニット部と、回転駆動部と、ジョイント部とを備えた転写ベルト駆動機構をモデル化する転写ベルト駆動機構モデル化方法において、転写ユニット部と回転駆動部とは、それぞれ1つの慣性モーメントを有する独立の慣性系とし、それらを連結する前記ジョイント部は、慣性モーメントを有しない仮想的なものとして想定すると共に、転写ユニット部の駆動ローラの軸回りの粘性係数及び回転駆動部の前記回転駆動手段の出力軸回りの粘性係数を考慮する2慣性系の解析モデルを用いて、転写ベルト駆動機構をモデル化する。
【解決手段】 転写ユニット部と、回転駆動部と、ジョイント部とを備えた転写ベルト駆動機構をモデル化する転写ベルト駆動機構モデル化方法において、転写ユニット部と回転駆動部とは、それぞれ1つの慣性モーメントを有する独立の慣性系とし、それらを連結する前記ジョイント部は、慣性モーメントを有しない仮想的なものとして想定すると共に、転写ユニット部の駆動ローラの軸回りの粘性係数及び回転駆動部の前記回転駆動手段の出力軸回りの粘性係数を考慮する2慣性系の解析モデルを用いて、転写ベルト駆動機構をモデル化する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、プリンタ、ファクシミリ、複写機、それらの複合機などの画像形成装置に備えられる転写ベルト駆動機構のモデル化方法、及びそのモデル化方法を用いて転写ベルト駆動機構の制御系の設計を支援する設計支援方法に関するものである。
【背景技術】
【0002】
従来から、画像形成装置に備えられる転写ベルト駆動機構が提案されている(例えば、特許文献1)。このような転写ベルト駆動機構は、回転駆動手段としてのパルスモータが、減速系であるタイミングベルトを介して、駆動軸及び駆動ローラに伝達され、この駆動ローラによって、複数の従動ローラに張架されたエンドレスベルトを駆動回転させると共に、エンコーダなどの変位量計測部によって回転体であるエンドレスベルトの変位量を計測し、その計測した変位量と目標変位量との偏差を偏差演算部で求め、その偏差に基づいてパルスモータをフィードバック制御部によってフィードバック制御するようになっている(特許文献1の図8、図1等参照)。
【0003】
ところで、このような転写ベルト駆動機構を制御する場合、共振により転写ベルトの走行が不安定となり転写画像が乱れるという問題があるため、まず共振を明確にし、それを避けるように制御系を構築する必要がある。
しかし、転写ベルト駆動機構は複雑であるため、試作機を構築してから実験で共振を求める方法が一般的となっている。試作機を構築してから実験で共振を求める方法の場合、転写駆動機構の一部を変更した場合でも、試作−実験を行う必要が有り、最終的な制御系の設計までに時間がかかるという問題点がある。このような問題点を解決するために、転写ベルト駆動機構のモデルを作成する方法が考えられているが、転写ベルト駆動機構は複雑であるため実際に適用可能なモデルを作成することが難題となっている。
【0004】
従来の転写ベルト駆動機構のモデル化方法としては、試作機などでシステムの周波数応答を実測し、その計測結果をボード線図などの周波数特性を表すグラフであらわし、そのグラフをそのままカーブフィットして伝達関数を求める方法と、共振を無視した解析モデルを用いてモデル化する方法があった。
しかし、前者は正確なモデルになるが、伝達関数の次数が高くなるので、解析時間の増大、誤差の多発という問題点があり、後者は簡単なモデルになり解析をする上で扱いやすいが、共振が含まれていないので不十分なモデルとなるという問題点があった。
【0005】
また、タイミングベルトによる駆動機構をモデル化する方法としては、本発明の発明者によって特許文献2に記載された、ベルト駆動モデル化方法が提案されている。しかし、このベルト駆動モデル化方法は、モデル化の対象が駆動要素のタイミングベルトそのものであり、タイミングベルトを用いない駆動系に対しては言及されていない。
【0006】
【特許文献1】特開2005−77681号公報
【特許文献2】特許第3820378号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
そこでこの発明は、前記従来のものの問題点を解決し、画像形成装置の転写ベルト駆動機構のモデル化方法において、複雑な解析モデルにならず、設計、解析の時間を短縮することが可能な転写ベルト駆動機構のモデル化方法を提供することを目的とする。また、そのモデル化方法を用いて、転写ベルト駆動機構の制御系の設計を支援する設計支援方法を提供することも目的とする。
【課題を解決するための手段】
【0008】
前記課題を解決するために、請求項1に記載の発明は、駆動ローラを含む複数のローラに張架された無端状の転写ベルトを有する転写ユニット部と、前記転写ベルトを回転駆動させる回転駆動手段を有する回転駆動部と、前記転写ユニット部と前記回転駆動部とを連結して回転駆動部の駆動力を前記駆動ローラに伝達するジョイント部とを備えた転写ベルト駆動機構をモデル化する転写ベルト駆動機構モデル化方法において、前記転写ユニット部と前記回転駆動部とは、それぞれ1つの慣性モーメントを有する独立の慣性系とし、それらを連結する前記ジョイント部は、慣性モーメントを有しない仮想的なものとして想定すると共に、転写ユニット部の前記駆動ローラの軸回りの粘性係数及び回転駆動部の前記回転駆動手段の出力軸回りの粘性係数を考慮する2慣性系の解析モデルを用いて、前記転写ベルト駆動機構をモデル化することを特徴とする。
【0009】
請求項2に記載の発明は、請求項1において、前記解析モデルにおいて、前記ジョイント部のねじりバネ定数と粘性係数とを考慮することを特徴とする。
【0010】
請求項3に記載の発明は、請求項2の転写ベルト駆動機構において、前記回転駆動手段は、所定の電流を入力すると所定のトルクでもって出力軸を回転駆動するモータであり、該モータに入力される電流から前記駆動ローラの角速度又は角変位までの制御要素の周波数応答を実測し、その実測値から求めた1次共振周波数fと、前記回転駆動部の駆動軸回りの慣性モーメントJMGと、前記転写ユニット部全体の前記駆動ローラ軸回りの慣性モーメントJRとから、前記ジョイント部のねじりバネ定数ksを次式から決定し、

実測した前記周波数応答から得られた1次共振の減衰特性と、前記2慣性系の解析モデルにモデル化した場合の伝達関数によりシミュレーションして算出した1次共振の減衰特性とが一致するように、前記ジョイント部の粘性係数を決定することを特徴とする。
【0011】
請求項4に記載の発明は、請求項1において、前記ジョイント部のねじりバネ定数を考慮することを特徴とする。
【0012】
請求項5に記載の発明は、請求項4の転写ベルト駆動機構において、前記回転駆動手段は、所定の電流を入力すると所定のトルクでもって出力軸を回転駆動するモータであり、該モータに入力される電流から前記駆動ローラの角速度又は角変位までの制御要素の周波数応答を実測し、その実測値から求めた1次共振周波数fと、前記回転駆動部の駆動軸回りの慣性モーメントJMGと、前記転写ユニット部全体の前記駆動ローラ軸回りの慣性モーメントJRとから、前記ジョイント部のねじりバネ定数ksを次式から決定し、
実測した前記周波数応答から得られた1次共振の減衰特性と、前記2慣性系の解析モデルにモデル化した場合の伝達関数によりシミュレーションして算出した1次共振の減衰特性とが一致するように、前記転写ユニット部の粘性係数を再設定することを特徴とする。
【0013】
請求項6に記載の発明は、請求項1ないし5のいずれかに記載の転写ベルト駆動機構モデル化方法を用いて、転写ベルト駆動機構の制御系の設計を支援することを特徴とする。
【発明の効果】
【0014】
この発明は、前記のようであって、本発明によれば、駆動ローラを含む複数のローラに張架された無端状の転写ベルトを有する転写ユニット部と、前記転写ベルトを回転駆動させる回転駆動手段を有する回転駆動部と、前記転写ユニット部と前記回転駆動部とを連結して回転駆動部の駆動力を前記駆動ローラに伝達するジョイント部とを備えた転写ベルト駆動機構をモデル化する転写ベルト駆動機構モデル化方法において、前記転写ユニット部と前記回転駆動部とは、それぞれ1つの慣性モーメントを有する独立の慣性系とし、それらを連結する前記ジョイント部は、慣性モーメントを有しない仮想的なものとして想定すると共に、転写ユニット部の前記駆動ローラの軸回りの粘性係数及び回転駆動部の前記回転駆動手段の出力軸回りの粘性係数を考慮する2慣性系の解析モデルを用いて、前記転写ベルト駆動機構をモデル化するので、複雑な解析モデルにならず、設計、解析の時間を短縮することが可能な、転写ベルト駆動機構のモデル化方法を提供することができる。
また、請求項6に記載の発明によれば、請求項1ないし5のいずれかに記載のモデル化方法を用いて、転写ベルト駆動機構の制御系の設計を支援するので、転写ベルト駆動機構の制御系の設計時間を大幅に短縮することができる。
【発明を実施するための最良の形態】
【0015】
この発明の実施の形態を、添付した図1〜7を参照して説明する。
【0016】
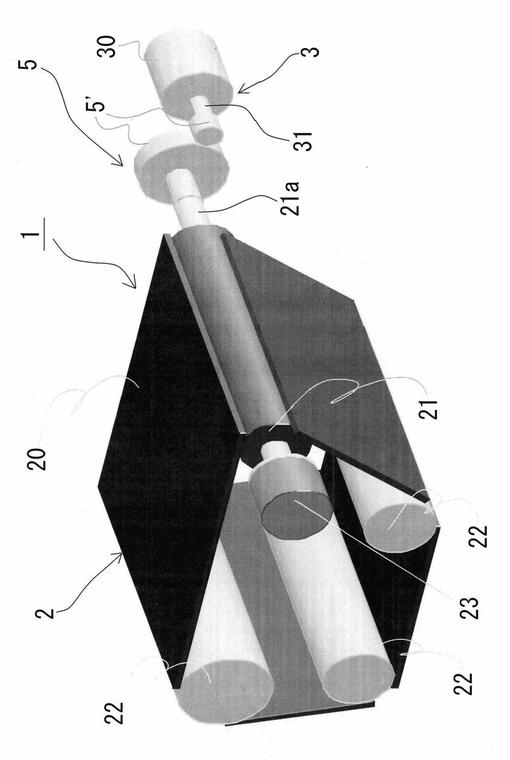
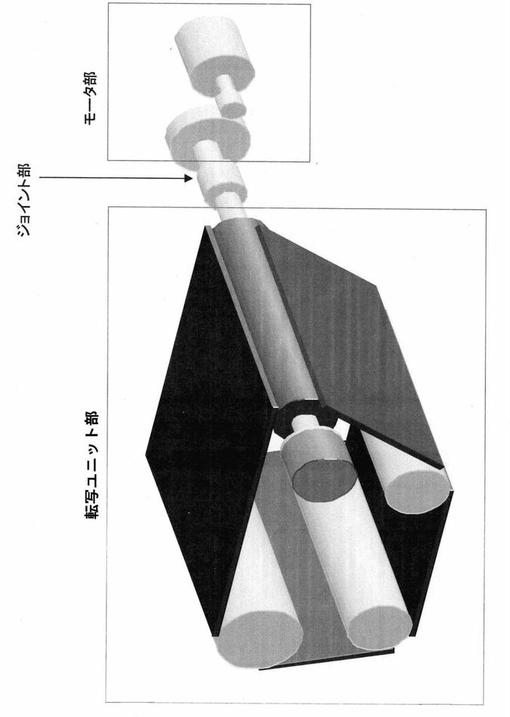
図1は、本発明がモデル化しようとする転写ベルト駆動機構の一例を示す斜視図である。この転写ベルト駆動機構1は、プリンタ、ファクシミリ、複写機、それらの複合機などの画像形成装置に備えられ、該装置の画像形成部で形成された画像を転写するために、転写ユニットを回転駆動させる機構であり、転写ユニット部2と、回転駆動部であるモータ部3と、それらを連結するジョイント部5とから構成されている。転写ユニット部2は、無端状の転写ベルトであるエンドレスベルト20を有し、このエンドレスベルト20は、駆動ローラ21と複数の従動ローラ22に張架され、駆動ローラ21で駆動されて所定方向に回転移動する。モータ部3は、エンドレスベルト20を回転駆動させる回転駆動手段としてのDCモータ30を備え、このDCモータ30は、直流電流を入力すると出力軸31を所定のトルクで駆動する。この出力軸31の先端には、動力伝達手段である歯車減速系5’が連結されており、DCモータ30で発生する回転トルクが、この歯車減速系5’を介して、転写ユニット部2の駆動ローラ21の駆動軸21aに伝達される。ジョイント部5は、この歯車減速系5’から構成されている。
また、駆動軸21aの歯車減速系5’が連結されていない方の軸端には、エンコーダ23がカップリングされており、このエンコーダ23は、駆動ローラ21の回転角に応じて信号を出力し、角変位を検出する状態検出装置としてフィードバック制御に用いられる。
【0017】
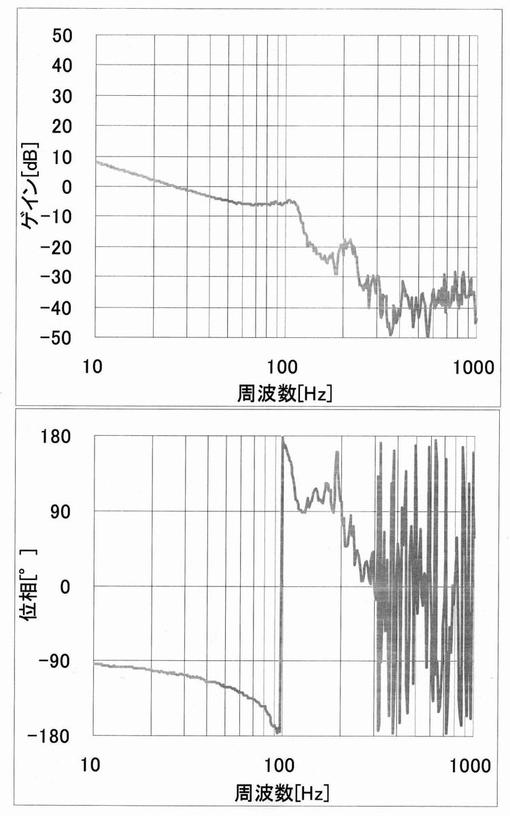
図2は、図1の転写ベルト駆動機構を制御要素としてサーボアナライザなどの測定器で周波数応答を実測したボード線図である。この周波数応答の周波数特性から明らかなように、実際の転写ベルト駆動機構の伝達関数は、高次の共振を含んでいるものと推測される(周波数が100Hzより大きい部分のゲイン特性曲線、位相特性曲線とも、滑らかな曲線ではなく乱高下している)。そのため、この周波数特性に完全に合致するような解析モデルを想定することは、困難であった。
しかし、転写ベルト駆動機構をモデル化する目的は、図1で示したような転写ベルト駆動機構をフィードバック制御により制御する制御系の設計を支援することであり、そのため、設計、解析の時間短縮を図ることのできる簡易な解析モデルが求められている。
そこで、図1のような転写ベルト駆動機構を1次共振を含む2慣性系の解析モデルでモデル化することを試みる。
【0018】
[実施の形態1]
以下、転写ベルト駆動機構の制御系の設計のために利用される転写ベルト駆動機構モデル化方法に本発明を適用した場合の一実施の形態(以下、本実施の形態を「実施の形態1」という。)について説明する。
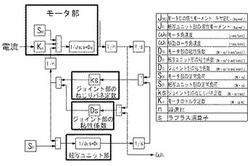
図3は、実施の形態1に係る解析モデルの概念を表す斜視図であり、図4は、実施の形態1に係る解析モデルを示すブロック図である。図3、図4に示すように、図1で示したような転写ベルト駆動機構を、モータ部と転写ユニット部とからなる2つの慣性系として考え、その間の軸部にジョイント部を想定する。そして、このジョイント部の軸回りの減衰特性である「ねじりバネ」特性と「粘性」特性を、1次共振要素として考慮する。また、転写ユニット部の駆動ローラの軸回りの粘性係数及びモータ部の軸回りの粘性係数をそれぞれの慣性系での減衰特性として考慮する。
そして、このジョイント部は、実際に物理的に存在しない仮想的な一体軸のようなものを想定し、慣性のない、つまり、慣性モーメントを有さないものとして取り扱う。
【0019】
次に、図4のブロック図で示す解析モデルにより転写ベルト駆動機構のモデル化を行う際の各パラメータを決定する方法の一例について説明する。
先ず、転写ベルト駆動機構を設計するにあたって、図1で示すような転写ベルト駆動機構の試作機を作成し、実験において、制御系がフィードバック制御する対象となる入力をモータ部に入力される電流とし、出力を転写ベルトの駆動ローラの角速度までとする制御要素の周波数応答を測定する。
【0020】
次に、この解析モデルの伝達関数を特定する。図4に示す解析モデルのパラメータのうち、モータ部の粘性係数DM、モータ部の定常負荷SM、転写ユニット部の粘性係数DR、転写ユニット部の定常負荷SR、以外は設計値から容易に算出可能である。従って、前記4つのパラメータの算出方法の一例を以下に示す。
【0021】
(i)モータ部の粘性係数DM、モータ部の定常負荷SMの算出
モータ部のみ(ギヤを含む)を考える。先ず、試作機などにおいて、図1で示したような転写ベルト駆動機構のモータ指令電流に対するモータ電流とモータ角速度を電流計、タコジェネレータ等で実際に計測し、モータ電流及びモータ角速度の時系列データを得る。このモータ角速度時系列データから、モータ部の機械的時定数を用いてモータ部の粘性係数を算出し、回転運動の運動方程式よりモータ部の定常負荷を算出する。
つまり、モータ部に関しては、ギヤの慣性をもモータ軸に含めて考えて1慣性系(慣性モーメントは1つ)とみなし、モータ部の粘性係数DMを1次遅れ要素と考えると、入力をモータ電流、出力をモータ角速度までとしたときは、その伝達関数、時定数は以下の式となる。
【数1】
【数2】
K:1次遅れ系の比例定数、s:ラプラス演算子、Ta:モータ部の機械的時定数、
JMG:モータ部の慣性モーメント、DM:モータ部の粘性係数
ここで、モータの回転開始からTaの時のモータの角速度(線速)は、その最終値(モータ回転開始から時間が十分に経った時)の約63.2%に達することから逆算して、前記モータ角速度時系列データよりモータ部の機械的時定数を求め、既知のモータ部の慣性モーメントJMGを代入して、モータ部の粘性係数DMを算出する。
そして、モータ部に関する回転運動の運動方程式より、モータ角速度時系列データの最終値部分(モータの回転開始から時間が十分に経過した部分)のモータ角速度ωMを用いて慣性項を除くと次式となり、モータ部の定常負荷SMを求めることができる。
【数3】
Ke:モータのトルク定数、i:モータ電流、DM:モータ部の粘性係数、ωM:モータ角速度、SM:モータ部の定常負荷
【0022】
(ii)転写ユニット部の粘性係数DR、転写ユニット部の定常負荷SRの算出
次に、モータ部と転写ユニット部を考える。(i)と同様に、モータ指令電流に対するモータ電流、モータ角速度、駆動ローラ角速度を電流計、タコジェネレータ、エンコーダ等で実際に計測し、駆動ローラ角速度の時系列データから、(i)と同様に機械的時定数を用いて転写ユニット部の粘性係数を算出し、回転運動の運動方程式より転写ユニット部の定常負荷を算出する。
つまり、モータ部+中転ユニットで2慣性系とみなし、モータ部の粘性係数DM、及び転写ユニット部の粘性係数DRを各慣性系での1次遅れ要素と考えると、入力をモータ電流、出力を駆動ローラ角速度までとしたときの伝達関数、時定数は以下の式となる。
【数4】
【数5】
K:1次遅れ系の比例定数、s:ラプラス演算子、Tb:モータ部+転写ユニット部の機械的時定数、JMG:モータ部の慣性モーメント、DM:モータ部の粘性係数、JR:転写ユニット部の慣性モーメント、DR:転写ユニット部の粘性係数、n:減速比
(i)と同様に、駆動ローラ角速度時系列データより時定数Tbを求め、既知の慣性モーメントJMG,JRと(i)で算出したモータ部粘性係数DMを用いて、転写ユニット部の粘性係数DRを算出する。
そして、(i)と同様に、転写ユニット部に関する回転運動の運動方程式より、駆動ローラ角速度時系列データの最終値部分の駆動ローラ角速度ωRを用いて慣性項を除くと次式となり、転写ユニット部の定常負荷SRを求めることができる。
【数6】
i:モータ電流、Ke:モータのトルク定数、DM:モータ部の粘性係数、ωM:モータ角速度、SM:モータ部の定常負荷、n:減速比、DR:転写ユニット部の粘性係数、ωR:駆動ローラ角速度、SR:転写ユニット部の定常負荷
【0023】
まず、実験においてモータに入力される電流から転写ベルト駆動ローラ角速度、もしくは角変位までの伝達関数を求める。モータが決定されれば、トルク定数は求められるので、ここで、モータのトルク定数をモータに入力した電流値にかけることにより、モータトルクから転写ベルト駆動ローラ角速度、もしくは角変位までの伝達関数が簡単に求められる。
【0024】
次に、ジョイント部のねじりバネ定数の算出について説明する。
ジョイント部のねじりバネ定数ksは、ジョイント部の粘性係数を無視した状態で求める。2慣性系の場合、ジョイント部の粘性係数DSを無視すれば、1次共振周波数fは、次式で求められる。
【数7】
この式の左辺をジョイント部のねじりバネ定数ksに変換すると次式となる。
【数8】
従って、実験により1次共振周波数fを求め、この式に既知のモータ部の慣性モーメントJMG及び転写ユニット部の慣性モーメントJRを代入することで、ジョイント部ねじりばね定数ksは算出することができる。尚、1次共振周波数は、周波数応答実測結果のゲイン線図のピーク値のうち、最も低い周波数として、求められる。このようにしてねじりバネ定数ksが得られたら次に実測した1次共振の減衰特性と、解析モデルによる1次共振の減衰特性と略一致するように、ジョイント部の粘性係数DSを決定する。1次共振の減衰特性とジョイント部の粘性係数DSは1対1に対応しており、ジョイント部の粘性係数DSをかえることで1次共振の減衰特性もかわるので、ジョイント部の粘性係数DSの値をかえてシミュレーションを行い、1次共振のあたりの周波数において、周波数応答実測結果と比較することでジョイント部の粘性係数DSが決定できる。
【0025】
次に、本実施の形態1に係る転写ベルト駆動機構のモデル化方法の有効性を検証する。図5は、ある転写ベルト駆動機構に対して実施の形態1に係る転写ベルト駆動機構のモデル化方法を適用し、それにより得られた伝達関数の周波数特性と実際の転写ベルト駆動機構を実測することで得られた周波数特性とを比較したグラフである。
図から分かるように、100Hz付近より高い周波数、即ち、1次共振周波数fより高い周波数では、両者に若干の差が見られるが、制御系の設計に特に必要な1次共振以下の周波数では両者はほぼ一致しており、本発明によるモデル化の有効性が確認できた。
【0026】
[実施の形態2]
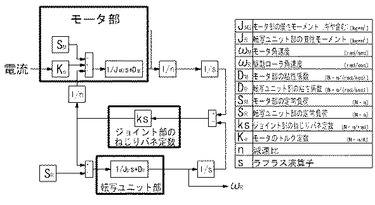
次に、前記実施の形態1とは別の実施の形態(以下、実施の形態2という。)について説明する。図6は、実施の形態2に係る解析モデルを示すブロック図である。実施の形態2に係る解析モデルでは、実施の形態1と同様に、転写ベルト駆動機構の解析モデルをモータ部と転写ベルト部からなる2つの慣性として考え、その間の軸部にジョイント部を想定するが、ジョイント部には、ねじりバネ定数ksのみを1次共振要素として考慮し、粘性係数DSは考慮しない。これにより、より少ないパラメータで転写ベルト駆動機構をモデル化することができる。
【0027】
次に、図6のブロック図で示す解析モデルにより転写ベルト駆動機構のモデル化を行う際に各パラメータを決定する方法の一例について説明する。しかし、ジョイント部のねじりバネ定数ksを決定するまでの各パラメータの決定方法は、実施の形態1と同様であるので、ここでの説明は省略する。実施の形態2に係るモデル化方法が実施の形態1と相違する点は、ジョイント部での粘性を考慮しないかわりに、モデル化方法の最後の工程で1次遅れ要素として考慮した転写ユニット部の粘性係数を、実測した周波数特性に合致するよう再決定する点である。
つまり,実測した1次共振の減衰特性と、解析モデルによる1次共振の減衰特性と略一致するように、転写ユニット部の粘性係数DSを再決定する。1次共振の減衰特性と転写ユニット部の粘性係数DSは1対1に対応しており転写ユニット部の粘性係数DRをかえることで1次共振の減衰特性もかわるので、転写ユニット部の粘性係数DRの値をかえてシミュレーションを行い、1次共振のあたりの周波数において、周波数応答実測結果と比較することで転写ユニット部の粘性係数DRが決定できる。こうすることで、実施の形態2に係る解析モデルに必要なパラメータを全て決定することができる。しかし、このように転写ユニット部の粘性係数を再決定することにより、該粘性係数は、物理的な意味において、実際の値とは異なるものとなるが、実施の形態1よりも少ないパラメータで解析モデルを構築できる点でメリットがある。
【0028】
次に、実施の形態2に係る転写ベルト駆動機構のモデル化方法の有効性を検証する。図7は、ある転写ベルト駆動機構に対して実施の形態2に係る転写ベルト駆動機構のモデル化方法を適用し、それにより得られた伝達関数の周波数特性と実際の転写ベルト駆動機構を実測することで得られた周波数特性とを比較したグラフである。
図から分かるように、実施の形態1と同様、1次共振周波数fより高い周波数では、両者に若干の差が見られるが、制御系の設計に特に必要な1次共振以下の周波数では両者はほぼ一致しており、本実施の形態によるモデル化方法の有効性が確認できた。
【0029】
以上のように、本発明の実施の形態を説明したが、実施の形態に係るモデル化方法が対象とする転写ベルト駆動機構は、感光体ドラムなどの像担持体から画像が一旦中間転写ベルトに転写され、その後中間転写ベルトから用紙等の記録媒体に転写されるいわゆる間接転写方式の転写ベルト駆動機構に限らず、記録媒体に像担持体から直接画像が転写されるいわゆる直接転写方式の転写ベルト駆動機構にも適用できることは言うまでもない。
尚、図面で示した構成各部材の形状や構造等は、あくまでも好ましい一例を示すものであり、その実施に際しては特許請求の範囲に記載した範囲内で、任意に設計変更・修正ができるものである。
【図面の簡単な説明】
【0030】
【図1】図1は、本発明がモデル化しようとする転写ベルト駆動機構の一例を示す斜視図である。
【図2】図2は、図1の転写ベルト駆動機構を制御要素としてオシロスコープなどの測定器で周波数応答を実測したボード線図である。
【図3】図3は、実施の形態1に係る解析モデルの概念を表す斜視図である。
【図4】図4は、実施の形態1に係る解析モデルを示すブロック図である。
【図5】図5は、実施の形態1に係るモデル化方法により得られた伝達関数の周波数特性と実際の転写ベルト駆動機構を実測することで得られた周波数特性とを比較したグラフである。
【図6】図6は、実施の形態2に係る解析モデルを示すブロック図である。
【図7】図7は、実施の形態2に係るモデル化方法により得られた伝達関数の周波数特性と実際の転写ベルト駆動機構を実測することで得られた周波数特性とを比較したグラフである。
【符号の説明】
【0031】
1 転写ベルト駆動機構
2 転写ユニット部
20 エンドレスベルト
21 駆動ローラ
21a 駆動軸
22 従動ローラ
23 エンコーダ
3 モータ部
30 DCモータ
31 出力軸
5 ジョイント部
5’ 歯車減速系
【技術分野】
【0001】
この発明は、プリンタ、ファクシミリ、複写機、それらの複合機などの画像形成装置に備えられる転写ベルト駆動機構のモデル化方法、及びそのモデル化方法を用いて転写ベルト駆動機構の制御系の設計を支援する設計支援方法に関するものである。
【背景技術】
【0002】
従来から、画像形成装置に備えられる転写ベルト駆動機構が提案されている(例えば、特許文献1)。このような転写ベルト駆動機構は、回転駆動手段としてのパルスモータが、減速系であるタイミングベルトを介して、駆動軸及び駆動ローラに伝達され、この駆動ローラによって、複数の従動ローラに張架されたエンドレスベルトを駆動回転させると共に、エンコーダなどの変位量計測部によって回転体であるエンドレスベルトの変位量を計測し、その計測した変位量と目標変位量との偏差を偏差演算部で求め、その偏差に基づいてパルスモータをフィードバック制御部によってフィードバック制御するようになっている(特許文献1の図8、図1等参照)。
【0003】
ところで、このような転写ベルト駆動機構を制御する場合、共振により転写ベルトの走行が不安定となり転写画像が乱れるという問題があるため、まず共振を明確にし、それを避けるように制御系を構築する必要がある。
しかし、転写ベルト駆動機構は複雑であるため、試作機を構築してから実験で共振を求める方法が一般的となっている。試作機を構築してから実験で共振を求める方法の場合、転写駆動機構の一部を変更した場合でも、試作−実験を行う必要が有り、最終的な制御系の設計までに時間がかかるという問題点がある。このような問題点を解決するために、転写ベルト駆動機構のモデルを作成する方法が考えられているが、転写ベルト駆動機構は複雑であるため実際に適用可能なモデルを作成することが難題となっている。
【0004】
従来の転写ベルト駆動機構のモデル化方法としては、試作機などでシステムの周波数応答を実測し、その計測結果をボード線図などの周波数特性を表すグラフであらわし、そのグラフをそのままカーブフィットして伝達関数を求める方法と、共振を無視した解析モデルを用いてモデル化する方法があった。
しかし、前者は正確なモデルになるが、伝達関数の次数が高くなるので、解析時間の増大、誤差の多発という問題点があり、後者は簡単なモデルになり解析をする上で扱いやすいが、共振が含まれていないので不十分なモデルとなるという問題点があった。
【0005】
また、タイミングベルトによる駆動機構をモデル化する方法としては、本発明の発明者によって特許文献2に記載された、ベルト駆動モデル化方法が提案されている。しかし、このベルト駆動モデル化方法は、モデル化の対象が駆動要素のタイミングベルトそのものであり、タイミングベルトを用いない駆動系に対しては言及されていない。
【0006】
【特許文献1】特開2005−77681号公報
【特許文献2】特許第3820378号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
そこでこの発明は、前記従来のものの問題点を解決し、画像形成装置の転写ベルト駆動機構のモデル化方法において、複雑な解析モデルにならず、設計、解析の時間を短縮することが可能な転写ベルト駆動機構のモデル化方法を提供することを目的とする。また、そのモデル化方法を用いて、転写ベルト駆動機構の制御系の設計を支援する設計支援方法を提供することも目的とする。
【課題を解決するための手段】
【0008】
前記課題を解決するために、請求項1に記載の発明は、駆動ローラを含む複数のローラに張架された無端状の転写ベルトを有する転写ユニット部と、前記転写ベルトを回転駆動させる回転駆動手段を有する回転駆動部と、前記転写ユニット部と前記回転駆動部とを連結して回転駆動部の駆動力を前記駆動ローラに伝達するジョイント部とを備えた転写ベルト駆動機構をモデル化する転写ベルト駆動機構モデル化方法において、前記転写ユニット部と前記回転駆動部とは、それぞれ1つの慣性モーメントを有する独立の慣性系とし、それらを連結する前記ジョイント部は、慣性モーメントを有しない仮想的なものとして想定すると共に、転写ユニット部の前記駆動ローラの軸回りの粘性係数及び回転駆動部の前記回転駆動手段の出力軸回りの粘性係数を考慮する2慣性系の解析モデルを用いて、前記転写ベルト駆動機構をモデル化することを特徴とする。
【0009】
請求項2に記載の発明は、請求項1において、前記解析モデルにおいて、前記ジョイント部のねじりバネ定数と粘性係数とを考慮することを特徴とする。
【0010】
請求項3に記載の発明は、請求項2の転写ベルト駆動機構において、前記回転駆動手段は、所定の電流を入力すると所定のトルクでもって出力軸を回転駆動するモータであり、該モータに入力される電流から前記駆動ローラの角速度又は角変位までの制御要素の周波数応答を実測し、その実測値から求めた1次共振周波数fと、前記回転駆動部の駆動軸回りの慣性モーメントJMGと、前記転写ユニット部全体の前記駆動ローラ軸回りの慣性モーメントJRとから、前記ジョイント部のねじりバネ定数ksを次式から決定し、
実測した前記周波数応答から得られた1次共振の減衰特性と、前記2慣性系の解析モデルにモデル化した場合の伝達関数によりシミュレーションして算出した1次共振の減衰特性とが一致するように、前記ジョイント部の粘性係数を決定することを特徴とする。
【0011】
請求項4に記載の発明は、請求項1において、前記ジョイント部のねじりバネ定数を考慮することを特徴とする。
【0012】
請求項5に記載の発明は、請求項4の転写ベルト駆動機構において、前記回転駆動手段は、所定の電流を入力すると所定のトルクでもって出力軸を回転駆動するモータであり、該モータに入力される電流から前記駆動ローラの角速度又は角変位までの制御要素の周波数応答を実測し、その実測値から求めた1次共振周波数fと、前記回転駆動部の駆動軸回りの慣性モーメントJMGと、前記転写ユニット部全体の前記駆動ローラ軸回りの慣性モーメントJRとから、前記ジョイント部のねじりバネ定数ksを次式から決定し、
実測した前記周波数応答から得られた1次共振の減衰特性と、前記2慣性系の解析モデルにモデル化した場合の伝達関数によりシミュレーションして算出した1次共振の減衰特性とが一致するように、前記転写ユニット部の粘性係数を再設定することを特徴とする。
【0013】
請求項6に記載の発明は、請求項1ないし5のいずれかに記載の転写ベルト駆動機構モデル化方法を用いて、転写ベルト駆動機構の制御系の設計を支援することを特徴とする。
【発明の効果】
【0014】
この発明は、前記のようであって、本発明によれば、駆動ローラを含む複数のローラに張架された無端状の転写ベルトを有する転写ユニット部と、前記転写ベルトを回転駆動させる回転駆動手段を有する回転駆動部と、前記転写ユニット部と前記回転駆動部とを連結して回転駆動部の駆動力を前記駆動ローラに伝達するジョイント部とを備えた転写ベルト駆動機構をモデル化する転写ベルト駆動機構モデル化方法において、前記転写ユニット部と前記回転駆動部とは、それぞれ1つの慣性モーメントを有する独立の慣性系とし、それらを連結する前記ジョイント部は、慣性モーメントを有しない仮想的なものとして想定すると共に、転写ユニット部の前記駆動ローラの軸回りの粘性係数及び回転駆動部の前記回転駆動手段の出力軸回りの粘性係数を考慮する2慣性系の解析モデルを用いて、前記転写ベルト駆動機構をモデル化するので、複雑な解析モデルにならず、設計、解析の時間を短縮することが可能な、転写ベルト駆動機構のモデル化方法を提供することができる。
また、請求項6に記載の発明によれば、請求項1ないし5のいずれかに記載のモデル化方法を用いて、転写ベルト駆動機構の制御系の設計を支援するので、転写ベルト駆動機構の制御系の設計時間を大幅に短縮することができる。
【発明を実施するための最良の形態】
【0015】
この発明の実施の形態を、添付した図1〜7を参照して説明する。
【0016】
図1は、本発明がモデル化しようとする転写ベルト駆動機構の一例を示す斜視図である。この転写ベルト駆動機構1は、プリンタ、ファクシミリ、複写機、それらの複合機などの画像形成装置に備えられ、該装置の画像形成部で形成された画像を転写するために、転写ユニットを回転駆動させる機構であり、転写ユニット部2と、回転駆動部であるモータ部3と、それらを連結するジョイント部5とから構成されている。転写ユニット部2は、無端状の転写ベルトであるエンドレスベルト20を有し、このエンドレスベルト20は、駆動ローラ21と複数の従動ローラ22に張架され、駆動ローラ21で駆動されて所定方向に回転移動する。モータ部3は、エンドレスベルト20を回転駆動させる回転駆動手段としてのDCモータ30を備え、このDCモータ30は、直流電流を入力すると出力軸31を所定のトルクで駆動する。この出力軸31の先端には、動力伝達手段である歯車減速系5’が連結されており、DCモータ30で発生する回転トルクが、この歯車減速系5’を介して、転写ユニット部2の駆動ローラ21の駆動軸21aに伝達される。ジョイント部5は、この歯車減速系5’から構成されている。
また、駆動軸21aの歯車減速系5’が連結されていない方の軸端には、エンコーダ23がカップリングされており、このエンコーダ23は、駆動ローラ21の回転角に応じて信号を出力し、角変位を検出する状態検出装置としてフィードバック制御に用いられる。
【0017】
図2は、図1の転写ベルト駆動機構を制御要素としてサーボアナライザなどの測定器で周波数応答を実測したボード線図である。この周波数応答の周波数特性から明らかなように、実際の転写ベルト駆動機構の伝達関数は、高次の共振を含んでいるものと推測される(周波数が100Hzより大きい部分のゲイン特性曲線、位相特性曲線とも、滑らかな曲線ではなく乱高下している)。そのため、この周波数特性に完全に合致するような解析モデルを想定することは、困難であった。
しかし、転写ベルト駆動機構をモデル化する目的は、図1で示したような転写ベルト駆動機構をフィードバック制御により制御する制御系の設計を支援することであり、そのため、設計、解析の時間短縮を図ることのできる簡易な解析モデルが求められている。
そこで、図1のような転写ベルト駆動機構を1次共振を含む2慣性系の解析モデルでモデル化することを試みる。
【0018】
[実施の形態1]
以下、転写ベルト駆動機構の制御系の設計のために利用される転写ベルト駆動機構モデル化方法に本発明を適用した場合の一実施の形態(以下、本実施の形態を「実施の形態1」という。)について説明する。
図3は、実施の形態1に係る解析モデルの概念を表す斜視図であり、図4は、実施の形態1に係る解析モデルを示すブロック図である。図3、図4に示すように、図1で示したような転写ベルト駆動機構を、モータ部と転写ユニット部とからなる2つの慣性系として考え、その間の軸部にジョイント部を想定する。そして、このジョイント部の軸回りの減衰特性である「ねじりバネ」特性と「粘性」特性を、1次共振要素として考慮する。また、転写ユニット部の駆動ローラの軸回りの粘性係数及びモータ部の軸回りの粘性係数をそれぞれの慣性系での減衰特性として考慮する。
そして、このジョイント部は、実際に物理的に存在しない仮想的な一体軸のようなものを想定し、慣性のない、つまり、慣性モーメントを有さないものとして取り扱う。
【0019】
次に、図4のブロック図で示す解析モデルにより転写ベルト駆動機構のモデル化を行う際の各パラメータを決定する方法の一例について説明する。
先ず、転写ベルト駆動機構を設計するにあたって、図1で示すような転写ベルト駆動機構の試作機を作成し、実験において、制御系がフィードバック制御する対象となる入力をモータ部に入力される電流とし、出力を転写ベルトの駆動ローラの角速度までとする制御要素の周波数応答を測定する。
【0020】
次に、この解析モデルの伝達関数を特定する。図4に示す解析モデルのパラメータのうち、モータ部の粘性係数DM、モータ部の定常負荷SM、転写ユニット部の粘性係数DR、転写ユニット部の定常負荷SR、以外は設計値から容易に算出可能である。従って、前記4つのパラメータの算出方法の一例を以下に示す。
【0021】
(i)モータ部の粘性係数DM、モータ部の定常負荷SMの算出
モータ部のみ(ギヤを含む)を考える。先ず、試作機などにおいて、図1で示したような転写ベルト駆動機構のモータ指令電流に対するモータ電流とモータ角速度を電流計、タコジェネレータ等で実際に計測し、モータ電流及びモータ角速度の時系列データを得る。このモータ角速度時系列データから、モータ部の機械的時定数を用いてモータ部の粘性係数を算出し、回転運動の運動方程式よりモータ部の定常負荷を算出する。
つまり、モータ部に関しては、ギヤの慣性をもモータ軸に含めて考えて1慣性系(慣性モーメントは1つ)とみなし、モータ部の粘性係数DMを1次遅れ要素と考えると、入力をモータ電流、出力をモータ角速度までとしたときは、その伝達関数、時定数は以下の式となる。
【数1】
【数2】
K:1次遅れ系の比例定数、s:ラプラス演算子、Ta:モータ部の機械的時定数、
JMG:モータ部の慣性モーメント、DM:モータ部の粘性係数
ここで、モータの回転開始からTaの時のモータの角速度(線速)は、その最終値(モータ回転開始から時間が十分に経った時)の約63.2%に達することから逆算して、前記モータ角速度時系列データよりモータ部の機械的時定数を求め、既知のモータ部の慣性モーメントJMGを代入して、モータ部の粘性係数DMを算出する。
そして、モータ部に関する回転運動の運動方程式より、モータ角速度時系列データの最終値部分(モータの回転開始から時間が十分に経過した部分)のモータ角速度ωMを用いて慣性項を除くと次式となり、モータ部の定常負荷SMを求めることができる。
【数3】
Ke:モータのトルク定数、i:モータ電流、DM:モータ部の粘性係数、ωM:モータ角速度、SM:モータ部の定常負荷
【0022】
(ii)転写ユニット部の粘性係数DR、転写ユニット部の定常負荷SRの算出
次に、モータ部と転写ユニット部を考える。(i)と同様に、モータ指令電流に対するモータ電流、モータ角速度、駆動ローラ角速度を電流計、タコジェネレータ、エンコーダ等で実際に計測し、駆動ローラ角速度の時系列データから、(i)と同様に機械的時定数を用いて転写ユニット部の粘性係数を算出し、回転運動の運動方程式より転写ユニット部の定常負荷を算出する。
つまり、モータ部+中転ユニットで2慣性系とみなし、モータ部の粘性係数DM、及び転写ユニット部の粘性係数DRを各慣性系での1次遅れ要素と考えると、入力をモータ電流、出力を駆動ローラ角速度までとしたときの伝達関数、時定数は以下の式となる。
【数4】
【数5】
K:1次遅れ系の比例定数、s:ラプラス演算子、Tb:モータ部+転写ユニット部の機械的時定数、JMG:モータ部の慣性モーメント、DM:モータ部の粘性係数、JR:転写ユニット部の慣性モーメント、DR:転写ユニット部の粘性係数、n:減速比
(i)と同様に、駆動ローラ角速度時系列データより時定数Tbを求め、既知の慣性モーメントJMG,JRと(i)で算出したモータ部粘性係数DMを用いて、転写ユニット部の粘性係数DRを算出する。
そして、(i)と同様に、転写ユニット部に関する回転運動の運動方程式より、駆動ローラ角速度時系列データの最終値部分の駆動ローラ角速度ωRを用いて慣性項を除くと次式となり、転写ユニット部の定常負荷SRを求めることができる。
【数6】
i:モータ電流、Ke:モータのトルク定数、DM:モータ部の粘性係数、ωM:モータ角速度、SM:モータ部の定常負荷、n:減速比、DR:転写ユニット部の粘性係数、ωR:駆動ローラ角速度、SR:転写ユニット部の定常負荷
【0023】
まず、実験においてモータに入力される電流から転写ベルト駆動ローラ角速度、もしくは角変位までの伝達関数を求める。モータが決定されれば、トルク定数は求められるので、ここで、モータのトルク定数をモータに入力した電流値にかけることにより、モータトルクから転写ベルト駆動ローラ角速度、もしくは角変位までの伝達関数が簡単に求められる。
【0024】
次に、ジョイント部のねじりバネ定数の算出について説明する。
ジョイント部のねじりバネ定数ksは、ジョイント部の粘性係数を無視した状態で求める。2慣性系の場合、ジョイント部の粘性係数DSを無視すれば、1次共振周波数fは、次式で求められる。
【数7】
この式の左辺をジョイント部のねじりバネ定数ksに変換すると次式となる。
【数8】
従って、実験により1次共振周波数fを求め、この式に既知のモータ部の慣性モーメントJMG及び転写ユニット部の慣性モーメントJRを代入することで、ジョイント部ねじりばね定数ksは算出することができる。尚、1次共振周波数は、周波数応答実測結果のゲイン線図のピーク値のうち、最も低い周波数として、求められる。このようにしてねじりバネ定数ksが得られたら次に実測した1次共振の減衰特性と、解析モデルによる1次共振の減衰特性と略一致するように、ジョイント部の粘性係数DSを決定する。1次共振の減衰特性とジョイント部の粘性係数DSは1対1に対応しており、ジョイント部の粘性係数DSをかえることで1次共振の減衰特性もかわるので、ジョイント部の粘性係数DSの値をかえてシミュレーションを行い、1次共振のあたりの周波数において、周波数応答実測結果と比較することでジョイント部の粘性係数DSが決定できる。
【0025】
次に、本実施の形態1に係る転写ベルト駆動機構のモデル化方法の有効性を検証する。図5は、ある転写ベルト駆動機構に対して実施の形態1に係る転写ベルト駆動機構のモデル化方法を適用し、それにより得られた伝達関数の周波数特性と実際の転写ベルト駆動機構を実測することで得られた周波数特性とを比較したグラフである。
図から分かるように、100Hz付近より高い周波数、即ち、1次共振周波数fより高い周波数では、両者に若干の差が見られるが、制御系の設計に特に必要な1次共振以下の周波数では両者はほぼ一致しており、本発明によるモデル化の有効性が確認できた。
【0026】
[実施の形態2]
次に、前記実施の形態1とは別の実施の形態(以下、実施の形態2という。)について説明する。図6は、実施の形態2に係る解析モデルを示すブロック図である。実施の形態2に係る解析モデルでは、実施の形態1と同様に、転写ベルト駆動機構の解析モデルをモータ部と転写ベルト部からなる2つの慣性として考え、その間の軸部にジョイント部を想定するが、ジョイント部には、ねじりバネ定数ksのみを1次共振要素として考慮し、粘性係数DSは考慮しない。これにより、より少ないパラメータで転写ベルト駆動機構をモデル化することができる。
【0027】
次に、図6のブロック図で示す解析モデルにより転写ベルト駆動機構のモデル化を行う際に各パラメータを決定する方法の一例について説明する。しかし、ジョイント部のねじりバネ定数ksを決定するまでの各パラメータの決定方法は、実施の形態1と同様であるので、ここでの説明は省略する。実施の形態2に係るモデル化方法が実施の形態1と相違する点は、ジョイント部での粘性を考慮しないかわりに、モデル化方法の最後の工程で1次遅れ要素として考慮した転写ユニット部の粘性係数を、実測した周波数特性に合致するよう再決定する点である。
つまり,実測した1次共振の減衰特性と、解析モデルによる1次共振の減衰特性と略一致するように、転写ユニット部の粘性係数DSを再決定する。1次共振の減衰特性と転写ユニット部の粘性係数DSは1対1に対応しており転写ユニット部の粘性係数DRをかえることで1次共振の減衰特性もかわるので、転写ユニット部の粘性係数DRの値をかえてシミュレーションを行い、1次共振のあたりの周波数において、周波数応答実測結果と比較することで転写ユニット部の粘性係数DRが決定できる。こうすることで、実施の形態2に係る解析モデルに必要なパラメータを全て決定することができる。しかし、このように転写ユニット部の粘性係数を再決定することにより、該粘性係数は、物理的な意味において、実際の値とは異なるものとなるが、実施の形態1よりも少ないパラメータで解析モデルを構築できる点でメリットがある。
【0028】
次に、実施の形態2に係る転写ベルト駆動機構のモデル化方法の有効性を検証する。図7は、ある転写ベルト駆動機構に対して実施の形態2に係る転写ベルト駆動機構のモデル化方法を適用し、それにより得られた伝達関数の周波数特性と実際の転写ベルト駆動機構を実測することで得られた周波数特性とを比較したグラフである。
図から分かるように、実施の形態1と同様、1次共振周波数fより高い周波数では、両者に若干の差が見られるが、制御系の設計に特に必要な1次共振以下の周波数では両者はほぼ一致しており、本実施の形態によるモデル化方法の有効性が確認できた。
【0029】
以上のように、本発明の実施の形態を説明したが、実施の形態に係るモデル化方法が対象とする転写ベルト駆動機構は、感光体ドラムなどの像担持体から画像が一旦中間転写ベルトに転写され、その後中間転写ベルトから用紙等の記録媒体に転写されるいわゆる間接転写方式の転写ベルト駆動機構に限らず、記録媒体に像担持体から直接画像が転写されるいわゆる直接転写方式の転写ベルト駆動機構にも適用できることは言うまでもない。
尚、図面で示した構成各部材の形状や構造等は、あくまでも好ましい一例を示すものであり、その実施に際しては特許請求の範囲に記載した範囲内で、任意に設計変更・修正ができるものである。
【図面の簡単な説明】
【0030】
【図1】図1は、本発明がモデル化しようとする転写ベルト駆動機構の一例を示す斜視図である。
【図2】図2は、図1の転写ベルト駆動機構を制御要素としてオシロスコープなどの測定器で周波数応答を実測したボード線図である。
【図3】図3は、実施の形態1に係る解析モデルの概念を表す斜視図である。
【図4】図4は、実施の形態1に係る解析モデルを示すブロック図である。
【図5】図5は、実施の形態1に係るモデル化方法により得られた伝達関数の周波数特性と実際の転写ベルト駆動機構を実測することで得られた周波数特性とを比較したグラフである。
【図6】図6は、実施の形態2に係る解析モデルを示すブロック図である。
【図7】図7は、実施の形態2に係るモデル化方法により得られた伝達関数の周波数特性と実際の転写ベルト駆動機構を実測することで得られた周波数特性とを比較したグラフである。
【符号の説明】
【0031】
1 転写ベルト駆動機構
2 転写ユニット部
20 エンドレスベルト
21 駆動ローラ
21a 駆動軸
22 従動ローラ
23 エンコーダ
3 モータ部
30 DCモータ
31 出力軸
5 ジョイント部
5’ 歯車減速系
【特許請求の範囲】
【請求項1】
駆動ローラを含む複数のローラに張架された無端状の転写ベルトを有する転写ユニット部と、前記転写ベルトを回転駆動させる回転駆動手段を有する回転駆動部と、前記転写ユニット部と前記回転駆動部とを連結して回転駆動部の駆動力を前記駆動ローラに伝達するジョイント部とを備えた転写ベルト駆動機構をモデル化する転写ベルト駆動機構モデル化方法において、
前記転写ユニット部と前記回転駆動部とは、それぞれ1つの慣性モーメントを有する独立の慣性系とし、それらを連結する前記ジョイント部は、慣性モーメントを有しない仮想的なものとして想定すると共に、転写ユニット部の前記駆動ローラの軸回りの粘性係数及び回転駆動部の前記回転駆動手段の出力軸回りの粘性係数を考慮する2慣性系の解析モデルを用いて、前記転写ベルト駆動機構をモデル化することを特徴とする転写ベルト駆動機構モデル化方法。
【請求項2】
前記解析モデルにおいて、前記ジョイント部のねじりバネ定数と粘性係数とを考慮することを特徴とする請求項1記載の転写ベルト駆動機構モデル化方法。
【請求項3】
前記転写ベルト駆動機構において、前記回転駆動手段は、所定の電流を入力すると所定のトルクでもって出力軸を回転駆動するモータであり、
該モータに入力される電流から前記駆動ローラの角速度又は角変位までの制御要素の周波数応答を実測し、その実測値から求めた1次共振周波数fと、前記回転駆動部の駆動軸回りの慣性モーメントJMGと、前記転写ユニット部全体の前記駆動ローラの軸回りの慣性モーメントJRとから、前記ジョイント部のねじりバネ定数ksを次式から決定し、
実測した前記周波数応答から得られた1次共振の減衰特性と、前記2慣性系の解析モデルにモデル化した場合の伝達関数によりシミュレーションして算出した1次共振の減衰特性とが略一致するように、前記ジョイント部の粘性係数を決定することを特徴とする請求項2記載の転写ベルト駆動機構モデル化方法。
【請求項4】
前記ジョイント部のねじりバネ定数を考慮することを特徴とする請求項1記載の転写ベルト駆動機構モデル化方法。
【請求項5】
前記転写ベルト駆動機構において、前記回転駆動手段は、所定の電流を入力すると所定のトルクでもって出力軸を回転駆動するモータであり、
該モータに入力される電流から前記駆動ローラの角速度又は角変位までの制御要素の周波数応答を実測し、その実測値から求めた1次共振周波数fと、前記回転駆動部の駆動軸回りの慣性モーメントJMGと、前記転写ユニット部全体の前記駆動ローラ軸回りの慣性モーメントJRとから、前記ジョイント部のねじりバネ定数ksを次式から決定し、
実測した前記周波数応答から得られた1次共振の減衰特性と、前記2慣性系の解析モデルにモデル化した場合の伝達関数によりシミュレーションして算出した1次共振の減衰特性とが略一致するように、前記転写ユニット部の粘性係数を再設定することを特徴とする請求項4記載の転写ベルト駆動機構モデル化方法。
【請求項6】
請求項1ないし5のいずれかに記載の転写ベルト駆動機構モデル化方法を用いて、前記写ベルト駆動機構の制御系の設計を支援する設計支援方法。
【請求項1】
駆動ローラを含む複数のローラに張架された無端状の転写ベルトを有する転写ユニット部と、前記転写ベルトを回転駆動させる回転駆動手段を有する回転駆動部と、前記転写ユニット部と前記回転駆動部とを連結して回転駆動部の駆動力を前記駆動ローラに伝達するジョイント部とを備えた転写ベルト駆動機構をモデル化する転写ベルト駆動機構モデル化方法において、
前記転写ユニット部と前記回転駆動部とは、それぞれ1つの慣性モーメントを有する独立の慣性系とし、それらを連結する前記ジョイント部は、慣性モーメントを有しない仮想的なものとして想定すると共に、転写ユニット部の前記駆動ローラの軸回りの粘性係数及び回転駆動部の前記回転駆動手段の出力軸回りの粘性係数を考慮する2慣性系の解析モデルを用いて、前記転写ベルト駆動機構をモデル化することを特徴とする転写ベルト駆動機構モデル化方法。
【請求項2】
前記解析モデルにおいて、前記ジョイント部のねじりバネ定数と粘性係数とを考慮することを特徴とする請求項1記載の転写ベルト駆動機構モデル化方法。
【請求項3】
前記転写ベルト駆動機構において、前記回転駆動手段は、所定の電流を入力すると所定のトルクでもって出力軸を回転駆動するモータであり、
該モータに入力される電流から前記駆動ローラの角速度又は角変位までの制御要素の周波数応答を実測し、その実測値から求めた1次共振周波数fと、前記回転駆動部の駆動軸回りの慣性モーメントJMGと、前記転写ユニット部全体の前記駆動ローラの軸回りの慣性モーメントJRとから、前記ジョイント部のねじりバネ定数ksを次式から決定し、
実測した前記周波数応答から得られた1次共振の減衰特性と、前記2慣性系の解析モデルにモデル化した場合の伝達関数によりシミュレーションして算出した1次共振の減衰特性とが略一致するように、前記ジョイント部の粘性係数を決定することを特徴とする請求項2記載の転写ベルト駆動機構モデル化方法。
【請求項4】
前記ジョイント部のねじりバネ定数を考慮することを特徴とする請求項1記載の転写ベルト駆動機構モデル化方法。
【請求項5】
前記転写ベルト駆動機構において、前記回転駆動手段は、所定の電流を入力すると所定のトルクでもって出力軸を回転駆動するモータであり、
該モータに入力される電流から前記駆動ローラの角速度又は角変位までの制御要素の周波数応答を実測し、その実測値から求めた1次共振周波数fと、前記回転駆動部の駆動軸回りの慣性モーメントJMGと、前記転写ユニット部全体の前記駆動ローラ軸回りの慣性モーメントJRとから、前記ジョイント部のねじりバネ定数ksを次式から決定し、
実測した前記周波数応答から得られた1次共振の減衰特性と、前記2慣性系の解析モデルにモデル化した場合の伝達関数によりシミュレーションして算出した1次共振の減衰特性とが略一致するように、前記転写ユニット部の粘性係数を再設定することを特徴とする請求項4記載の転写ベルト駆動機構モデル化方法。
【請求項6】
請求項1ないし5のいずれかに記載の転写ベルト駆動機構モデル化方法を用いて、前記写ベルト駆動機構の制御系の設計を支援する設計支援方法。
【図4】


【図6】
【図1】
【図2】
【図3】
【図5】

【図7】

【図6】
【図1】
【図2】
【図3】
【図5】
【図7】
【公開番号】特開2008−197062(P2008−197062A)
【公開日】平成20年8月28日(2008.8.28)
【国際特許分類】
【出願番号】特願2007−35359(P2007−35359)
【出願日】平成19年2月15日(2007.2.15)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成20年8月28日(2008.8.28)
【国際特許分類】
【出願日】平成19年2月15日(2007.2.15)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]