
多摩川精機株式会社により出願された特許
91 - 100 / 669
孔路計測装置
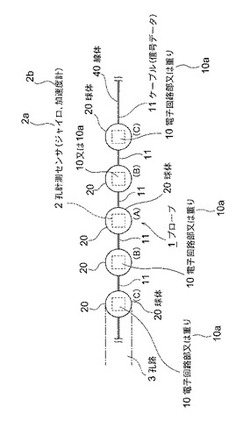
【課題】本発明は、複数の球体をケーブルで接続してなるプローブを用いる場合に、各球体間をケーブルとは独立した線体で接続することにより、L字管路を通過する時の検出範囲オーバーを防止することを目的とする。
【解決手段】本発明による孔路計測装置は、孔計測センサ(2)はプローブ(1)を形成する各球体(20)のうちの中央(A)に内蔵され、各球体(20)は信号データ用のケーブル(11)とは別々の線体(40)の2本によって各々接続し、プローブ(1)がL字管路(30)を曲る時に、孔計測センサ(2)の検出範囲オーバーを防止できる構成である。
(もっと読む)
遊技機用ステップモータの駆動・停止制御方法

【課題】本発明は、バイポーラ定電圧駆動方式リール駆動ユニットにおける各Hアームをオンさせることにより、巻線両端をVDD電位に接続し、低消費電力化、小型化を得ることを目的とする。
【解決手段】本発明による遊技機用ステップモータの駆動・停止制御方法は、コントローラによりリールを停止させるための条件が発生したリール停止条件発生後、前記各Hブリッジ(1,2)における各Hアーム(3,7)を全てオンとし、二相巻線(10)の両端を電源電位に接続してステップモータ(5)を停止させる場合、前記リール停止条件発生後、一旦、前記二相巻線(10)に対する励磁を全てオフとし、前記コントローラ(20)に予めパラメータとして設定された時間経過後に前記各Hアーム(3,7)をオンとする方法である。
(もっと読む)
遊技機用ステップモータの駆動・停止制御方法
【課題】本発明は、バイポーラ定電圧駆動方式リール駆動ユニットにおける各Hアームをオンさせることにより、巻線両端をVDD電位に接続し、低消費電力化、小型化を得ることを目的とする。
【解決手段】本発明による遊技機用ステップモータの駆動・停止制御方法は、コントローラによりリールを停止させるための条件が発生したリール停止条件発生後、前記各Hブリッジ(1,2)における各Hアーム(3,7)を全てオンとし、二相巻線(10)の両端を電源電位に接続してステップモータ(5)を停止させる場合、前記リール停止条件発生後、一旦、前記二相巻線(10)を励磁し、前記コントローラ(20)に予めパラメータとして設定された時間経過後に前記各Hアーム(3,7)をオンとする方法である。
(もっと読む)
遊技機用ステップモータの駆動・停止制御方法
【課題】本発明は、バイポーラ定電圧駆動方式リール駆動ユニットにおける各Hアームをオンさせることにより、巻線両端をVDD電位に接続し、低消費電力化、小型化を得ることを目的とする。
【解決手段】本発明による遊技機用ステップモータの駆動・停止制御方法は、コントローラによりリールを停止させるための条件が発生したリール停止条件発生後、前記各Hブリッジ(1,2)における各Hアーム(3,7)を全てオンとし、二相巻線(10)の両端を電源電位に接続してステップモータ(5)を停止させる場合、前記リール停止条件発生後、一旦、前記二相巻線(10)のうちの一相の巻線(6又は9)のみを励磁し、前記コントローラ(20)に予めパラメータとして設定された時間経過後に前記各Hアーム(3,7)をオンとする方法である。
(もっと読む)
磁石埋め込み型円筒リニアモータ
【課題】本発明は、可動子に磁性リングとリングマグネット体を交互に設け、リングマグネット体を複数のリングマグネットで構成することにより、円筒状固定子に流れる磁束を正弦波状として推力の向上を得ることを目的とする。
【解決手段】本発明による磁石埋め込み型円筒リニアモータは、円筒状固定子(3)の内側の可動子(5)の外周に設けた各リングマグネット体(6)を複数のリングマグネット(6a〜6c)で形成し、各リングマグネット(6a〜6c)を互いに異ならせると共に、その磁化方向を45度ラジアル磁化方向(6aA,6bA)とすることにより、円筒状固定子(3)側に正弦波状の磁束を形成し、推力の向上を計るようにした構成である。
(もっと読む)
モータ速度検出構造、角速度センサ付き角度センサおよびサーボシステム
【課題】 角度センサを有するサーボシステムにおいて、演算器の負荷を軽減でき、低速時の速度演算の誤差を低減でき、速度制御性にも検出精度にも優れたシステムを提供すること。
【解決手段】 モータ速度検出構造10は、モータ1の回転による角度情報を検知してモータ1の位置制御用として提供するための角度センサ2と、モータ1の回転による角速度情報を検知してモータ1の速度制御用として提供するための角速度センサ3とから構成する。角度センサ2としてはレゾルバ、角速度センサ3としてはジャイロスコープを用いることができる。ジャイロスコープはレゾルバのロータあるいはサーボの軸に取り付ければよい。
(もっと読む)
リニアセンサ
【課題】本発明は、検出コイルと長手状磁性部材の組合わせにより簡単な構成で高性能の直線検出を行うことを目的とする。
【解決手段】本発明によるリニアセンサは、長手状磁性部材(40)の両側部(43,44)の側部長手方向(43a,44a)が、E型コア(31)のコア長さ方向(B)と直交するコア幅方向(C)に対して非直交方向となるように設定され、長手状磁性部材(40)と検出ステータ(30)との非接触状態による相対移動を第1、第2検出コイル(2,2A)で検出する構成である。
(もっと読む)
リニア位置センサ
【課題】従来のリニア位置センサは、複雑な構造が必要となり、信頼性が低くなっている。
【解決手段】本発明によるリニア位置センサでは、スケール方向3に沿う第1位置26での第1スケール内ギャップ24の幅と第2スケール内ギャップ25の幅との組み合わせが、スケール方向3に沿う第2位置27での第1スケール内ギャップ24の幅と第2スケール内ギャップ25の幅との組み合わせと異なるように第1〜第3スケール部材21〜23が配置されており、演算部31が、第1検出コイル15からの信号15aと第2検出コイル16からの信号16aとに基づいて、スケール方向3に沿う検出ステータ1とスケール体2との相対的な位置を検出する構成である。
(もっと読む)
ケーブルの巻取り巻戻し構造
【課題】 接続ケーブルを巻取る際に接続ケーブルが締まったり、あるいは巻戻す際に接続ケーブルが絡まったりする不具合を解消するとともに、大型の装置についても緩やかにケーブルを巻取り、巻戻すことを可能とするケーブルの巻取り巻戻し構造を提供することである。
【解決手段】 電動モータ1によって駆動される正逆回転する回転軸3と、その回転軸3に取り付けられて回転軸線O周りで回転する被作動体5から引き出された接続ケーブル7は回転軸3の回転を減速する減速機構9に接合されたケーブル保持レバー11によって回転軸3に緩やかに巻取り巻き戻しを行うことができる。
(もっと読む)
端子ピン接続構造及び方法
【課題】本発明は、端子ピンの周面に形成された溝を用いてマグネットワイヤを巻き付けることにより、重なりをなくすことを目的とする。
【解決手段】本発明による端子ピン接続構造及び方法は、端子ピン(2)の周面(2a)に形成した溝(5)内にマグネットワイヤ(3)の巻き始め始端(3a)を係合させた後に、マグネットワイヤ(3)が端子ピン(2)の周面(2a)に巻き付けられている構成である。
(もっと読む)
91 - 100 / 669
[ Back to top ]