
フィグラ株式会社により出願された特許
51 - 60 / 68
電極付板材ユニット
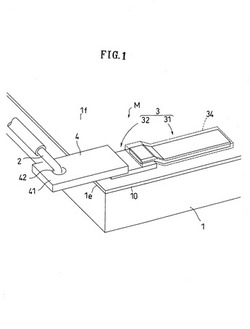
【課題】本発明はリード線と端子板の取り付け、端子板と接続部の取り付け、接続部の導電膜への取り付けにおいて密着性が良く、容易に外れない電極付板材ユニットを提供することを主目的とする。
【解決手段】板ガラス1の表面に導電膜10を形成し、当該導電膜10の抵抗の変化を検出するために前記導電膜10に複数の電極モジュールMを介してリード線2を接続した電極付板材ユニットに関する。前記電極モジュールMは、導電性の接着剤が片面に塗布された金属箔テープ31,32を前記導電膜10上に前記接着剤を介して接着された接続部3と、前記金属箔テープ31,32よりも厚く、かつ、前記金属箔テープ31上にろう付けされると共に前記リード線2に接続される端子板4とを備えている。
(もっと読む)
建築現場の管理システム

【課題】建築現場の管理システムにおいて、インターネット等のネットワークを利用して、リアルタイムに確認が行えるようにする。
【解決手段】建築現場及び管理現場を包括して監視する管理システムにおいて、管理システムは、建築現場の各監視ポイントに設けられた監視装置と、各監視装置にネットワークを介して接続された管理サーバを有すると共に、前記監視ポイントで得られた画像データ及び該画像データから解析された空間データを、時間軸データと環境データに関連付けて、リアルタイムに表示すると共に記録・保存することを特徴とする建築現場の管理システムである。
(もっと読む)
機能性ガラス
【課題】発光素子を単板のガラスにも配置することが可能であり、看板、電飾、照明などの各種の用途に利用した場合にも、十分な光量を備える機能性ガラスを提供する。
【解決手段】本発明の機能性ガラスは、導電膜を有する少なくとも1枚のガラスと、発光素子とから構成され、前記導電膜を有する少なくとも1枚のガラスの表面には設置孔又はガラス板の厚みの薄い部分を設けて設置部を形成し、該設置部に発光素子を埋設することによって、単板のガラス板に発光素子を配置することが可能である。
(もっと読む)
液状化粧料容器
【課題】液状化粧料を収容する液状化粧料容器において、使用に際して液だれを防止することによって周囲への汚損を防ごうとするものである。
【解決手段】化粧料容器本体の口部内に、底部にスリット12を配設してスリット片12aを形成してなる第1シゴキ9と、内側の断面が略U字形状であって、化粧料塗布体8を固持する支持軸7の軸径と略同一の開口径を有する開口部を配設する第2シゴキ13とを内設することにより、化粧料塗布体及び支持軸は、第1シゴキ9のスリット片と第2シゴキ13により確実に扱かれ、更に化粧料塗布体には必要最低限の液状化粧料のみが残るので、過剰な液状化粧料が付着することにより起きる液だれによる周囲への汚損を防止できると共に、確実に化粧料を塗布できるものとなる。
(もっと読む)
清掃ロボット
【課題】 液体の付着等による漏電を防止し得る清掃ロボットを提供する。
【解決手段】 床上を自走する清掃ロボットに関する。清掃ロボットは、第1モータの駆動で回転する駆動輪を有する走行アセンブリ1と、第2モータの駆動でブロワを回転させてノズル20が吸引したゴミを集塵する集塵アセンブリ50とを備えている。走行アセンブリ1には、第1モータに電力を供給する電源部が搭載され、集塵アセンブリ50が走行アセンブリ1上に着脱自在に設けられ、走行アセンブリ1および集塵アセンブリ50は、電源部の電力を第2モータに給電するために互いに接続されるコネクタを41,52有し、第1コネクタ41は底面4aよりも上方の位置に設けられていることを特徴とする。
(もっと読む)
作業ロボット
【課題】人との接触防止を確実にするとともに、壁際ギリギリまでの作業を可能にし、作業性能の向上を実現する作業ロボットを提供する。
【解決手段】障害物までの距離を測定する距離測定手段と、障害物が移動物体か静止物体かを判別する判別手段と、走行を停止すべき障害物までの距離の閾値Dxを算出する閾値算出手段と、前記距離測定手段により測定された距離計測値Mi が前記閾値Dxに達した時に走行を停止させる走行制御手段と、を備え、前記閾値算出手段は前記判別手段による判別の結果に基づいて、障害物が移動物体であると判別された場合に前記閾値Dxを減少させ、一方、障害物が静止物体であると判別された場合に前記閾値Dxを増大させて、前記閾値Dxを算出することを特徴とする。
(もっと読む)
スイッチ機構、及び該スイッチ機構を有する電気供給機構を利用する液状化粧料容器乃至化粧料容器
【課題】キャップに支持軸を介して保持される塗布体内にヒーター等の発熱機構を内装すると共に、該発熱機構に対して電気の供給を簡易且つ確実に行おうとするものである。
【解決手段】塗布部(8)を保持する支持軸(7)を、化粧料容器本体の口部と螺合する内キャップ(10)を介してキャップ本体(13)に装着するとともに、一定範囲でキャップ本体が内キャップに対して空転することで、キャップ(6)の先端に保持される塗布部内に内装されたヒーター(9)への通電の切入を、キャップ本体の回転に同期して行うようにするものであり、使用者は、化粧料容器本体からのキャップの脱着の際に自動的に塗布部内のヒーターへの電気の切入を行えるものであって、液状化粧料を加熱して粘度を低下させ、簡易且つ確実に塗布できる。
(もっと読む)
自走式作業ロボット
【課題】 簡単な教示作業で、走行方向による走行距離誤差の補正を行い、作業領域内を、正確に隈なく作業することのできる自走式作業ロボットを提供する。
【解決手段】 駆動輪を回転させて本体1の移動と方向操舵を制御する走行制御手段と、本体1の走行方向および左右方向にある障害物Hの有無を検出する障害物センサと、本体の走行方向を検知する方位センサと、前記本体に設けられ床面に所定の作業を行う作業手段と、実際に走行した往路X1,Y1の第1距離を測定する第1直進距離計測手段と、実際に走行した復路X2,Y2の第2距離を測定する第2直進距離計測手段とを備え、前記測定した往路の第1距離と前記測定した復路の第2距離との関係に基づいて、現在または次回以後の実走行距離を制御することを特徴とする。
(もっと読む)
自走式作業車
【課題】隣のレーンとのオーバラップ部分は、液剤が2回塗布されるため、粘度の高い液剤においては塗布後の平滑化が行われない。そのため、筋模様が床に表れる問題がある。そこで、隣のレーンとのオーバラップ部分の液剤の膜厚を一定にし得る自走式作業車を提供することを目的とする。
【解決手段】自走する作業車に関する。床面に液剤を塗布するためのノズルと、前記作業車の走行方向Xに概ね直交する横方向Yの所定の塗布幅Wにわたって前記塗布幅Wの両端近傍についての滴下量を、前記塗布幅の中央付近よりも小さくするよう制御する制御手段とを備えたことを特徴とする。
(もっと読む)
防犯・防災システム
【課題】導電性部材料を使用した窓ガラスの防犯システムは、窓ガラスのサイズ、形状、破損の大小、或いは温度等の環境条件、窓の開閉による接点の磨耗、腐食など様々な問題を持っており、これらが誤動作の原因となっている。本発明では、これのら誤動作の原因を取り除き、窓ガラスの防犯、防災の装置を提供するものである。
【解決手段】本発明ではこのような課題を解決するために、従来の導電性ガラスの抵抗値の検知方法ではなく、窓の開閉の有無を判別と同時に、導電性ガラスの抵抗値を正確に測定し、導電性ガラスの抵抗値の突然の変化、すなわち瞬時抵抗値と瞬時抵抗値直前の平均値の値を比較することによって、ガラスの破損の有無、火災等による異常検知の防犯、防災装置を提案するものである。
(もっと読む)
51 - 60 / 68
[ Back to top ]