
アシスト テクノロジーズ ジャパン株式会社により出願された特許
121 - 130 / 146
ローラコンベアレール及びローラコンベアレールにおけるキャリア搬送方法
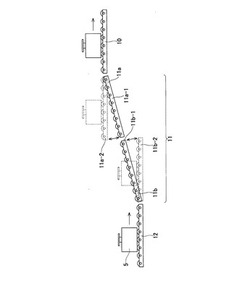
【課題】 異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋ぐ接続用ローラコンベアレールにおいて確実にキャリアを搬送する。
【解決手段】 ローラモジュール11bを水平位置に保持してキャリア5をコンベア12から搬送する。検出センサでキャリア5の進入完了を検出すると、ローラモジュール11bの駆動ローラを停止させてボールネジにより回転動作を作動させて傾斜状態まで回転させる。駆動ローラを駆動させ、傾斜状態で保持されるローラモジュール11aまでキャリア5を搬送させる。検出センサでキャリア5の進入完了を検出すると、ローラモジュール11aの駆動ローラを停止させてボールネジにより回転動作を作動させて水平状態まで回転させる。駆動ローラを駆動させ、コンベア10までキャリア5を搬送させる。
(もっと読む)
ストッカー

【課題】半導体製造用基板(ウエハ)を挿脱自在に収納した容器(FOUP)用の大型ストッカーにおいて、多数設けられた棚へ搬入ポートからFOUPの移載、或いは棚に載置されたFOUPの搬出ポートへ移送するロボットが正常に動作できない状況に陥ったとき、ストッカー内にある所望のFOUPの取り出しを容易に実施できること。
【解決手段】緊急に取り出す必要のある所望のFOUP3が載置されている棚2が属する扉14から人が当該所望のFOUP3を持出し、昇降板12上に載置する。昇降板12にはワイヤーが連結され、ワイヤーの巻取り、繰出し操作機構13のマニュアル操作によってストッカー外部に取り出す。
(もっと読む)
搬送台車
【課題】 搬送台車本体と昇降体の間で安定した双方向通信を行う搬送台車を提供する。
【解決手段】 レール3を走行するOHT搬送台車1において、台車本体1aの懸垂機構10と昇降体34の間の通信及び給電は、通信・給電部50の信号線13及び動力線14により行われる。信号線13は、駆動軸22に設けられた回転基板5上に実装された光学素子モジュール6a、6bと昇降体34の制御回路46に接続された信号線13aと、回転基板5に対向する位置に設けられた固定基板4上に実装された光学素子モジュール7a、7bと懸垂機構10の制御回路16に接続された信号線13bとを備え、光学素子モジュール6a、6bと光学素子モジュール7a、7bが双方向の光通信を行うことにより、懸垂機構10の制御回路16と昇降体34の制御回路46の間の通信を確保する。
(もっと読む)
搬送台車の障害物検出装置
【課題】天井走行式搬送台車を用いる搬送システムにおいて、的確に障害物を検出することにより安全性を確保することができる搬送台車の障害物検出装置を提供する。
【解決手段】 搬送台車の障害物検出装置1では、測距ビームスキャン検出装置2により測距ビームを予め登録した距離・角度でスキャンさせることにより形成される仮想平面で定義される監視領域内において障害物を検出する。測距ビームスキャン検出装置2が障害物を検出した場合は、障害物報知装置3で警告灯3aを点灯し、警告音出力装置3bで警報を鳴らす。又は、台車制御装置4で無線又は有線の通信手段4aを介して搬送台車10を減速・停止さる。尚、測距ビームスキャン検出装置2は、障害物を検出した場合に光の放射を停止する安全対策機能が付加されている。
(もっと読む)
懸垂式昇降搬送台車の搬送システム
【課題】半導体用基板(ウエハ)への各種表面処理のため、多くのステーションを複数の工程内環状軌道に分散配置し、各工程内環状軌道と連係する工程間環状軌道を備えた懸垂式昇降搬送装置用台車の搬送システムにおいて、特定の工程内環状軌道相互間における懸垂式昇降搬送装置用台車の流通が多い場合であっても、工程間環状軌道を走行する懸垂式昇降搬送装置用台車の円滑な走行を維持する。
【解決手段】懸垂式昇降搬送装置用台車2の流通が多い所定の異なる工程内環状軌道1b、1e相互間において、コンベアシステム5を設け、当該コンベアシステム5の両端部において夫々工程内環状軌道1b、1eの懸垂式昇降搬送装置用台車2との被搬送物(FOUP)8の授受が行えるようにした。
(もっと読む)
ローラ式コンベアにおける塵埃処理装置
【課題】 クリーンルームに設置されるローラ式コンベアにより半導体基板を収納したカセット等の被搬送物を搬送するに当り、被搬送物の底面と前記ローラ式コンベアのローラとの接触部位の転動摩擦により発生する塵埃を的確に捕獲し、クリーンルーム内への塵埃の拡散を防止することである。
【解決手段】 ローラ式コンベアのローラと被搬送物の底面との接触部位の変動により発生する塵埃を、被搬送物の底面に備えた粘着部にて捕獲し、この捕獲した塵埃を連続的あるいは適宜の時間間隔にて除去する手段を備える。
(もっと読む)
自動搬送システム
【課題】1つまたは複数の保管手段と複数の製造装置の間を制御装置の指令により複数の搬送台車で搬送される被搬送物を安価でかつ簡便にしかも高い信頼性をもって管理する。
【解決手段】全てのキャリア18に無線通信機能を内蔵したIDカード20を設置し、一部の搬送台車10に無線通信機能を内蔵したID読み書き装置25を設置する。そして、ID読み書き装置25に接続されたMCS4の指令によりIDカード20に対してキャリアIDを読み書きし、キャリアID管理部4aでキャリアIDの管理を行う。また、ID読み書き装置25を備えた搬送台車10でキャリア18を入出庫する都度、IDカード20から読み出したキャリアIDとキャリアID管理部4aで蓄積管理したキャリアIDとの一致をキャリアID確認部4bで確認し、不一致の場合はIDカード20から読み出したキャリアIDに基づいてキャリアID管理部4aのキャリアIDを書き換える。
(もっと読む)
搬送制御装置及び搬送制御方法
【課題】複数のフロアに分散した複数の製造工程で処理が行われる被製造物の搬送を行う搬送システムにおいて、搬送効率を向上させる。
【解決手段】出発地点からリフタまでの搬送距離とリフタから到着地点までの搬送距離の合計である合計搬送距離に基づいて、優先順位を算出する(S10)。そして、優先順位が最優先順位(再選択時は、次の順位が最優先順位となる)のリフタを選択し(S11)、当該リフタの待ち搬送台車数が制限値以下であるかどうかを判断する(S12)。最優先順位のリフタの待ち搬送台車数が制限値以下でない場合は(S12:NO)、当該リフタを選択から除外し(S13)、最優先順位のリフタを再選択する(S12)。一方、最優先順位のリフタの待ち搬送台車数が制限値以下である場合は(S12:YES)、当該リフタを搬送に使用するリフタとして決定し(S14)、搬送を開始する。
(もっと読む)
無人搬送台車用補助制御器
【課題】 天井に敷設された軌道上を走行する無人搬送台車に関し、無人搬送台車が不具合により走行駆動モータのブレーキが作動して走行できない状態にある時、無人搬送台車を移動させる為のメンテナンス装置を提供すること。
【解決手段】 無人搬送台車に補助的、一時的に外部から補助制御器を取り付け、この補助制御器を地上等の離隔した場所から無線あるいは光等によりリモートコントロールして無人搬送台車のブレーキの解除と、走行駆動モータの駆動および停止と、走行方向の左右のガイド切替とを行って、当該無人搬送台車を目的場所まで移動させる。
(もっと読む)
無人搬送台車
【課題】 液晶表示パネルの生産工場におけるガラス基板の搬送には、無人搬送台車が利用される。この場合において、基板の大型化に伴い無人搬送台車のフレーム基板に加わる荷重は増加傾向にあり、床から浮き上がり、無負荷状態となる走行輪はないようにすることが重要である。この要請に応えるべく、全走行輪にその走行路に凹凸があっても、均等荷重が加わるようにすることである。
【解決手段】 走行輪3xは3個で1ユニット3a〜3dを構成し、各ユニット3a〜3dは、その走行輪支持部材33が、当該各ユニット3a〜3dの所定個所への取付部材に対して全方向に揺動自在に連結される走行輪組立機構を備え、各走行輪ユニット3a〜3dは無人搬送台車のフレームにおける床面部材の底面部に3点支持の階層機構にて支持するように構成する。
(もっと読む)
121 - 130 / 146
[ Back to top ]