
株式会社国際電気通信基礎技術研究所により出願された特許
881 - 890 / 905
距離測定システム、距離測定方法ならびに通信装置
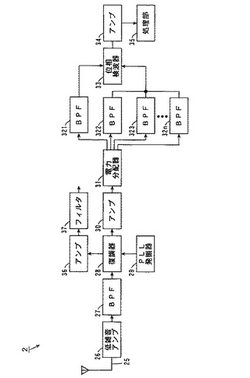
【課題】 簡単な構成でかつ低コストで無線端末間の距離を測定することが可能な距離測定システム、距離測定方法および通信装置を提供することである。
【解決手段】 一の移動端末に設けられた送信機から第1の周波数f1 を有する第1の搬送波および第2の周波数f2 を有する第2の搬送波が他の移動端末に送信される。他の移動端末に設けられた受信機により一の移動端末から送信された第1および第2の搬送波が受信され、第1および第2の搬送波の位相差Δφが検出される。さらに、検出された位相差Δφ、第1の周波数f1 および第2の周波数f2 に基づいて一の移動端末と他の移動端末との間の距離Rが算出される。
(もっと読む)
ターゲットデータセットの定量的尺度を定める方法

【課題】ある基準フレームに対するターゲットデータセットの性質を客観的に示す方法を提供する。
【解決手段】コーパスT3(20)の定量化尺度を定める方法は、2個の基準コーパスT1(22)及びT2(24)を選択するステップと、クロスエントロピーHを用いて式(1)及び(2)を計算するステップと、コーパスT1及びT2に対するコーパスT3の定量化尺度(I(T3))を、式(3)で表される関数として決定するステップとを含む。
【数1】 (もっと読む)
(もっと読む)
多肢選択言語試験問題自動作成装置およびコンピュータプログラム
【課題】多肢選択言語試験問題を自動的に作成することができる装置を提供する。
【解決手段】装置は、コーパスを記憶するコーパス記憶部82と、選択肢作成のための言語情報を記憶する各種データ記憶部68と、コーパスから問題の元となる文を選択する種文選択部84と、選択された文のうちの空所を決定する問題位置選択部86と、各種データ記憶部68に記憶された言語情報に基づいて、空所に対する選択肢候補を作成する選択肢候補生成処理部88と、選択された文において、空所を選択肢候補で置換して得られる文の妥当性を判定する妥当性判定部90と、文が妥当でないと判定された選択肢候補と、元となる文とを整形して多肢選択言語試験問題を作成する整形部94とを含む。
(もっと読む)
個体識別システム、衣類および個体識別方法
【構成】 個体識別システムは、識別対象18を撮影する赤外線カメラ16を含む。識別対象18には衣類20が着用され、この衣類20では、たとえば識別対象18の体からの水分を吸収して発熱することによって遠赤外線を放射する素材、識別対象18の体が放射する遠赤外線を遮断(反射、吸収)する素材、および遠赤外線を透過する素材を組み合わせることによって、たとえば2次元コードの形態で識別情報が形成される。この衣類20を着用している識別対象18を赤外線カメラ16で撮影すると、その赤外線画像では遠赤外線の強度分布として識別情報が現れる。この赤外線画像に画像処理を施すことによって、識別情報を抽出し解読して識別対象18を識別する。
【効果】 識別対象に由来する遠赤外線を検出するので、識別対象への負荷がなく、簡単に安定した識別を行うことができる。
(もっと読む)
データ検索方法及びコンピュータプログラム
【課題】素性間の相関を考慮して、何らかの最適化基準にしたがって対象の素性ベクトル間の距離を算出して類似データを検索する方法を提供する。
【解決手段】
データ検索方法は、素性ベクトルと関連付けられたデータ項目を含むコンピュータ読取可能なデータベース74を準備するステップと、行列M1/2による変換後の各クラスタのセントロイドと当該クラスタ内の全素性ベクトルとの間の距離の和を、クラスタの全てにわたって合計した値が最小となるような行列Mを算出するステップ72と、入力素性ベクトル→uに対し、集合中のベクトル→vとの間で次式により定義される距離dM(→u,→v)を算出するステップ92と、この距離が最小となるベクトル→vを特定し、対応するデータを抽出するステップ94とを含む。
【数1】 (もっと読む)
(もっと読む)
方向検出素子
【課題】 小型化および薄型化が可能でかつ入射光の方向を正確に検出することができる方向検出素子を提供することである。
【解決手段】 基板上の4つのPINフォトダイオード上に4つの矩形のコンタクトパッド201〜204が配置されている。コンタクトパッド201〜204間には基準点Pを中心として互いに90度の角度をなして放射状に延びる壁部301〜304が設けられ、壁部301〜304上には光吸収体8が設けられる。壁部301〜304の一方の側辺に沿って凹部10が形成され、他方の側辺および端部の周囲の辺に沿って溝11が形成される。壁部301〜304に隣接するようにPINフォトダイオードの矩形の受光領域101〜104が形成される。壁部301〜304が湾曲することにより壁部301〜304が垂直に起立する。壁部301〜304に照射された光が光吸収体8により吸収され反射しない。
(もっと読む)
光学マーカシステム
【課題】 特殊な撮像手段を用いることなく、移動する複数の撮像手段の位置及び姿勢を推定することができる光学マーカシステムを提供する。
【解決手段】 LEDマーカ21〜2mは、予め定められた位置に取り付けられ、その発光状態を変化させることにより自身に対して一意的に割り付けられた識別情報と時刻情報とを送信する。このとき、カメラ31〜3nがLEDマーカ21〜2mの発光点を含む画像を撮影し、候補点抽出部41〜4n及びマーカ追跡部51〜5nが撮影された画像からLEDマーカ21〜2mの点滅状態を検出し、情報検出部61がLEDマーカ21〜2mの識別情報及び時刻情報を抽出するとともに、抽出された識別情報及び時刻情報を基に画像上のLEDマーカ21〜2mの位置を検出し、カメラ位置姿勢推定部71が検出されたLEDマーカ21〜2mの識別情報、時刻情報及び位置を基にカメラ31〜3nの位置及び姿勢を推定する。
(もっと読む)
事故、インシデントレポート分析システム
【構成】 統合看護活動モニタシステム10と看護事故、インシデントレポートを結合させることにより、レポートの自由記述に欠如情報があるとき、看護活動モニタシステムを参照して、欠如している情報を補完または補間する(図5(A))。一方、看護活動モニタシステムで事故やインシデントの情報が欠けていたり、よく判らなかった場合、事故、インシデントレポートを参照し、欠如している情報を補完または補間する(図5(B))。そして、補完(または補間)されたデータはデータマイニング技術により解析される。
【効果】 補完(または補間)したデータマイニングによって分析するため、事故、インシデントと看護師や環境との関係を的確に把握できる。
(もっと読む)
機械翻訳装置および機械翻訳コンピュータプログラム
【課題】 用例機械翻訳において、得られた翻訳文を検証して所定条件にしたがって正しいと判定された翻訳文を出力することができる機械翻訳装置を提供する。
【解決手段】 機械翻訳装置130は、英語の文と日本語の文とからなる対訳文を複数含む用例ベース106と、英語の入力文120を受けて、用例ベース106中から対訳文を検索し、入力文120に対する日本語の翻訳文の複数の候補132A,…,132Mを生成する用例翻訳部140と、複数の候補132A,…,132Mのうち、言語モデル102および翻訳モデル104を用いて計算される統計的確率スコアが所定の条件を充足するものを、入力文120に対する翻訳文として選択する統計的選択部150とを含む。
(もっと読む)
テキストビジュアル音声(TTVS)合成方法及びコンピュータで実行可能なプログラム
【課題】仮想的または物理的なロボットがあたかも実際に話しているかのように口を動かすために必要な情報を生成できるようにする。
【解決手段】 TTVS合成方法は、オーディオ音声単位特定マークとそのそれぞれの口の動きの軌跡パラメータとのマッピング(32)を確立するステップと、それぞれ継続時間長が付された音声単位特定マークのリストを準備するステップと、それぞれの継続時間長がリストで特定された、リスト中の各音声単位について、口の動きの軌跡を表すパラメータ(60)を連結するステップと、連結された口の動きの軌跡パラメータに従って、人工の口を駆動するための口駆動信号を発生するステップ(62)と、を含む。
(もっと読む)
881 - 890 / 905
[ Back to top ]