
独立行政法人科学技術振興機構により出願された特許
51 - 60 / 1,734
センサ用構造体、容量式センサ、圧電式センサ、容量式アクチュエータ、及び、圧電式アクチュエータ
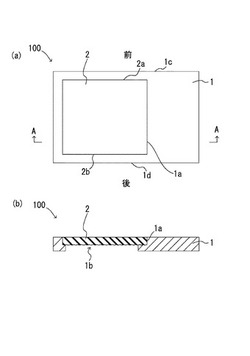
【課題】絶縁体層において基板の一方の面と同じ側の面に電極層を形成した際に基板と電極層との間(絶縁体層)で発生する寄生容量を従来よりも低減できるセンサ用構造体、該センサ構造体を用いたセンサ及びアクチュエータを得る。
【解決手段】基板1は、ケイ素などの半導体からなるものであり、一方の面に形成された矩形状の凹部1aと、他方の面において、絶縁体層2における基板1の一方の面と同じ側の面と反対側の面が露出するように形成された開口部1bと、を有したものである。絶縁体層2は、二酸化ケイ素などの絶縁体からなる層であり、基板1の凹部1aの内部に形成されているものである。また、絶縁体層2の厚さは、2μmより大きい寸法を有したものである。このような構成のセンサ構造体は、センサ及びアクチュエータに用いることができる。
(もっと読む)
計量装置及び計量装置の制御方法

【課題】物質の計量が要求されるタスクを物質の量を示す数値や単位について意識することなく容易に遂行することを可能にする計量装置及びその制御方法を提供する。
【解決手段】内壁面の少なくとも一部が所定の範囲内で可動に構成され、上部に開口部を有し、可動の内壁面の位置に応じて容積が可変の容器と、前記容器に接続した取っ手と、可動内壁面の位置を移動させる駆動手段と、前記駆動手段の作動を制御する制御手段と、を有し、前記制御手段は、タスクの情報を入力する入力部と、入力したタスクの情報からタスクの遂行のために要求される物質の量の情報を取得する取得部と、物質の量の情報とその物質の体積との対応関係を記憶する記憶部と、前記対応関係に基づき物質の量の情報に対応するその物質の体積を算出する算出部と、算出した物質の体積と前記容器の容積とが等しくなる位置に可動内壁面が移動するように駆動手段を作動させる駆動制御部と、を有する。
(もっと読む)
ロボットシステム
【課題】少ない時間で操作を習得することができる、直感的なロボットの遠隔操作インタフェースを提供する。
【解決手段】ロボットの操作装置が、カメラから取り込まれたカメラ映像が表示されるタッチスクリーンと、カメラ映像からロボットの3次元的な位置及び姿勢を認識するロボット認識部と、ロボット認識部で認識した位置及び姿勢とからロボットのCG映像を生成し、CG映像をタッチスクリーン上のロボットのカメラ映像に重畳表示するCG合成部と、ユーザのタッチ操作に応じて、タッチスクリーン上でCG映像のロボットを仮想的に動作させる操作入力部と、CG映像のロボットの仮想的な動作に追従してロボットが動作するように、ロボットに対して制御命令を送出するロボット制御部と、を有している。
(もっと読む)
抗インフルエンザウイルス組成物
【課題】有用な抗インフルエンザウイルス組成物を提供すること。
【解決手段】本発明の抗インフルエンザウイルス組成物は、可変領域が(A)配列番号3もしくは6に示されるアミノ酸配列;または(B)配列番号3もしくは6に示されるアミノ酸配列において、超可変領域外の1個もしくは数個のアミノ酸が置換、付加または欠失された、アミノ酸配列からなる抗体軽鎖の二量体を含んでいる。
(もっと読む)
制御装置
【課題】SOC又はディスクリート部品に搭載可能であって、従来装置よりも電力消費を大幅に抑制できる制御装置を得る。
【解決手段】制御装置100は、様々な機器などを制御することを主機能とする第1制御部10と、各種のデータを記憶可能な記憶部20と、データ加工を行うことが可能な第2制御部30と、電源50と、を備えている。第1制御部10は、様々な機器などを制御する主制御部11と、主制御部11で実行するプログラム及び各種のデータが格納されている記憶部12と、A/D変換器41から送信されたデジタル信号を記憶部20に記憶させる又は記憶部20から読み出す制御を行う記憶制御部13と、を有している。第1制御部10は、記憶部20に所定量のデータが蓄積される毎に、第2制御部30を稼働する制御を行う。
(もっと読む)
微小区画の融合と分裂を繰り返す方法
【課題】微小区画(例えば、リポソーム)の融合と分裂を繰り返す方法を提供することを本発明の課題とする。
【解決手段】上記課題は、リポソームなどの微小区画にポリマーを封入し、自然に微小区画が分裂する条件を見出し、電気融合などの条件と組み合わせる方法を提供することによって、解決された。自然に微小区画が分裂する条件は、代表的には、リポソームの排除体積の減少に起因する化学的ポテンシャルの減少(ΔEex)が、曲げエネルギーの獲得(ΔEbend)よりも大きい条件である。
(もっと読む)
β−ヒドロキシカルボニル化合物の製法
【課題】基質一般性の問題が克服できる水中での不斉アルドール反応用の触媒を開発し、ホルムアルデヒド以外のアルデヒド化合物を反応基質として用いることのできる反応系を提供する。
【解決手段】水中で下式で表される配位子とスカンジウムドデシルサルフェート等のルイス酸とを混合させて得られる触媒の存在下、1−t−ブチルチオ−1−プロペニルオキシトリメチルシラン等のケイ素エノラートとホルムアルデヒド等のアルデヒド化合物とを反応させるβ−ヒドロキシカルボニル化合物の製法。
(式中、R1及びR2はイソプロピル基、t−ブチル基等を表し、R3及びR4は水素原子等を表し、X1及びX2は水酸基等を表す。)
(もっと読む)
窒化アルミニウム製造方法
【課題】液相成長により、単結晶の窒化アルミニウム材料を製造することのできる技術を提供する。
【解決手段】窒化アルミニウム単結晶の製造方法は、種結晶の存在下に、窒化アルミニウム粉末を、窒化リチウムまたは窒化リチウムとアルミニウムの混合物とともに、常圧不活性ガス雰囲気下に加熱する工程を含む窒化アルミニウムの単結晶を製造する方法であって、前記加熱工程において、前記窒化リチウムまたは窒化リチウムとアルミニウムの混合物の組成が(液体+Li3AlN2)相内にあり、且つ、前記窒化アルミニウム粉末に前記窒化リチウムまたは窒化リチウムとアルミニウムの混合物を合わせた全組成が(液体+窒化アルミニウム+Li3AlN2)相内にあるような温度に加熱する。
(もっと読む)
マッサージ機器の操作装置
【課題】マッサージ機器において、マッサージ動作、強さ、施療位置・範囲などをユーザが簡単かつ直感的に指示することを可能にするインタフェースを提供する。
【解決手段】操作装置1は、人体の形状を模したぬいぐるみの中に、複数の圧力センサ11が2次元的に配列されたセンサ基板13とシリコンゴムの弾性体層14からなるセンサ部10を内蔵したものである。ユーザがぬいぐるみの背中を押圧すると、圧力センサ11の出力信号に基づいて押圧位置と押圧強さを計算し、その押圧位置に対応する人体上の位置が押圧強さに対応する強さでマッサージされるようにマッサージ機器を制御する。
(もっと読む)
磁気抵抗素子および磁気抵抗素子の製造方法
【課題】従来のTMR素子に比べて磁気抵抗を大きくし、出力電圧を大きくすることを目的とする。
【解決手段】磁気抵抗素子は、基板と、前記基板上に形成されたCo,Fe,Bを含む磁性合金からなる強磁性体層と、前記強磁性体層上にトンネル障壁層として(001)結晶面が優先配向した多結晶酸化マグネシウム層と、を有し、前記強磁性体層が結晶化していることに特徴がある。
(もっと読む)
51 - 60 / 1,734
[ Back to top ]