
株式会社エクォス・リサーチにより出願された特許
1,011 - 1,020 / 1,360
車両
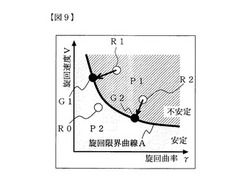
【課題】要求された旋回目標と実際の旋回限界を把握し、該旋回限界に対応した、より少ない制限量(旋回目標にできるだけ近い状態)で旋回する。
【解決手段】車両全体の重心位置を推定し、その重心位置に応じた限界横方向加速度alim(=aMin、aMax)を求め、搭乗者が要求する目標走行状態(V*、γ*)から求めた横方向加速度a*が、限界横方向加速度alimを超えない範囲で旋回走行を行う。すなわち、限界横方向加速度alimを超えない目標走行状態が搭乗者によって入力された場合には、その目標走行状態で旋回走行する。一方、限界横方向加速度alimを超える目標走行状態が入力された場合には、横方向加速度a*=限界横方向加速度alimとなるように、現実目標走行状態(V*〜、γ*〜)に制限する。これにより、旋回速度と旋回曲率を必要以上に制限しないので、車両の旋回性能を限界まで最大限利用することができる。
(もっと読む)
燃料電池システム

【課題】燃料電池スタックの酸化剤入口に酸化剤を供給する酸化剤供給室に配設された水供給ノズルを可動にして、燃料電池スタックの各部分に任意の水の量を供給することができ、燃料電池スタックの各部分の湿潤度を均一化して性能分布を均一化することができ、燃料電池スタックの出力を向上させることができ、システム全体を小型化することができるようにする。
【解決手段】電解質層を燃料極と酸素極とで挟持した燃料電池が、前記燃料極に沿って燃料流路が形成され、酸素極に沿って酸化剤流路が形成されたセパレータを介して複数電気的に接続され、前記酸化剤流路の酸化剤入口が各セパレータに形成された燃料電池集合体と、前記酸化剤入口に酸化剤を供給する酸化剤供給室と、該酸化剤供給室内に水を噴射する水供給装置とを有する燃料電池システムであって、前記水供給装置が水を噴射する位置又は噴射する方向を制御する制御装置を備えた。
(もっと読む)
車両用旋回制御装置
【課題】旋回時に車両の姿勢(回頭モーメント)を安定させことができ、エネルギーを効率的に利用できる車両用旋回制御装置を提供する。
【解決手段】本発明の車両用旋回制御装置を搭載した車両は、少なくとも一つの車輪にキャンバ角を付与可能な車両であり、旋回時一定の速度を超えた場合に、旋回半径に応じたキャンバ角を車輪に付与する(S104以降のキャンバモード)。特に、車両のヨーレートを計測するヨーレート計測手段と、理論上のヨーレートを計算するヨーレート計算手段とを有し、該ヨーレート計測手段によって得られるヨーレートが、該ヨーレート計算手段によって得られるヨーレートから一定以上乖離しているとき、車輪のキャンバ角を補正する(ステップS107以降)。
(もっと読む)
走行車両
【課題】 姿勢検出手段や駆動手段等が走行時に故障した場合や回避不可能な障害物に衝突する場合等の緊急時に、乗員を効率的に保護する走行車両を提供する。
【解決手段】 緊急時を判断する緊急時判断手段23aと、緊急時判断手段23aからの指令により、車体1を強制的に一方向へ傾斜させる強制傾斜手段7,26,27と、を備える。
(もっと読む)
車両
【課題】より少ない制限量(旋回目標にできるだけ近い状態)で旋回する。
【解決手段】車両全体の重心位置を推定し、その重心位置に応じた限界横方向加速度alim(=aMin、aMax)を求め、搭乗者が要求する目標走行状態(V*、γ*)から求めた横方向加速度a*が、限界横方向加速度alimを超えない範囲で旋回走行を行う。すなわち、限界横方向加速度alimを超えない目標走行状態(V*、γ*)が搭乗者によって入力(要求)された場合には、その目標走行状態で旋回走行する。一方、限界横方向加速度alimを超える目標走行状態(V*、γ*)が入力された場合には、横方向加速度a*=限界横方向加速度alimとなるように、理想目標走行状態(V*、γ*)を現実目標走行状態(V*〜、γ*〜)に制限する。これにより、旋回速度と旋回曲率を必要以上に制限しないので、車両の旋回性能を限界まで最大限利用することができる。
(もっと読む)
車両用駆動制御装置
【課題】動力源のトルクを検出するセンサを設けることなく、左右車輪を独立に駆動する動力源の特性差・劣化の検出を行う。
【解決手段】車両用駆動制御装置に、車両が直進走行状態にあるかどうかを判定する直進走行状態判定手段(S102)と、該車両が駆動状態か非駆動状態かを判定する駆動状態判定手段と、ドライバーの操舵入力を検出する操舵入力検出手段と、車両が直進走行状態にあると判定された場合で、車両が駆動状態にあると判定されたときの操舵入力検出手段による検出結果を記憶する駆動状態記憶手段(S105)と、車両が直進走行状態にあると判定された場合で、車両が非駆動状態にあると判定されたときの操舵入力検出手段による検出結果を記憶する非駆動状態記憶手段(S109)と、駆動状態記憶手段と非駆動状態記憶手段とに基づいて異常判定を行う異常判定手段(S106)と、を備える。
(もっと読む)
燃料電池システム
【課題】外気温度にかかわらず、水分の回収が十分可能な燃料電池システムを提供する。
【解決手段】燃料電池スタック100から排出される空気(酸化ガス)を、空気ダクト124を介して凝縮器51に導き、該凝縮器51において空気に水蒸気として含まれている水を回収する。凝縮器51は、空冷式の熱交換器51aと、冷媒によって冷却をおこなうエバポレータ51bとを直列に配置して構成する。熱交換器51aに加えて、適宜エバポレータ51bを併用し、水回収能力を補填し、十分な水回収能力確保する。
(もっと読む)
燃料電池システム
【課題】エネルギー効率が良く、水分の回収も十分可能な燃料電池システムを提供する。
【解決手段】外気温度Tairと、燃料電池スタック100の出力電流I[A]、及び流入する外気の流量qから、燃料電池システム1内に保有する水量が減らない目標温度Tdを決定し、この目標温度Tdとなるように、凝縮器51内エバポレータのコンプレッサ512を制御する。目標温度Tdを変更することによって、水タンク531内の水量の調整も可能となる。
(もっと読む)
車載画像表示装置
【課題】前方車両によって生成される死角領域を補完することができる画像表示装置を提供する。
【解決手段】前方車両のカメラで撮影された画像を、通信装置19を介して受信し、受信した画像を、カメラの設定位置を運転者の視点位置に変更した場合に映し出される画像に変換し、この視点変換画像データを、ヘッドアップディスプレイ14aによって、フロントガラスに表示する。フロントガラスにマーカが表示され、運転者がマーカに焦点を合わせると、角膜に結像したマーカ像を眼球撮影用カメラ14bが検出し、このマーカ像が検出された場合に、視点変換画像データが表示される。
(もっと読む)
燃料電池システム
【課題】循環ポンプ内での水の滞留を抑制する。
【解決手段】燃料電池スタック100へ燃料ガスを供給する燃料ガス供給路201Bと、燃料電池スタック100からの排出ガスを燃料ガス供給路201Bへ戻すガス排出流路202で構成された循環路に循環ポンプ25を設け、循環ポンプ25の吐出量を流量センサS5で検出し、流量が所定値以下になった場合には、循環ポンプ25内に結露水が滞留したと判断し、循環ポンプ25の吸入口側から、ドライの高圧燃料ガスを供給し、滞留した結露水を除去する。
(もっと読む)
1,011 - 1,020 / 1,360
[ Back to top ]