
Fターム[2B043AB02]の内容
農業機械一般(操向) (6,001) | 目的、効果又は機能 (649) | 機構などの性能向上 (115) | 小型化又は製造、組立ての合理化 (78)
Fターム[2B043AB02]に分類される特許
1 - 20 / 78
作業車両
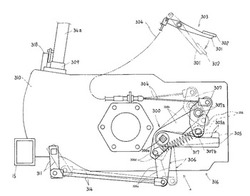
【課題】旋回に連動して切状態となる旋回内側のサイドクラッチの切状態の解除操作機構をコンパクトに構成し、広い取付スペースを必要としない作業車両を提供する。
【解決手段】走行車体に走行装置を設け、走行装置への駆動力を入切する切替伝動装置300を入切操作する操作部材305を設け、走行車体を操向操作する操舵部材を旋回操作すると切替伝動装置300を操作部材305を介して切操作する旋回連動機構Aを設けた作業車両において、旋回連動機構Aと操作部材305の間に旋回連動状態を解除する解除操作部材307を設けると共に、この解除操作部材307を旋回連動状態と連動解除状態に切り替える解除切替部材303を設けて構成する。
(もっと読む)
作業車両

【課題】本発明の課題は、パワステコントローラをエンジンとミッションケースの合わせ部近傍に配置し、且つ、車両左側部のスタータセルモータとエキゾーストマニホールドとの略中間部に配置することによって、パワステコントロールとステアリングハンドル間の距離を短縮し、且つ、ステアリングシャフトのジョイント部の折れ点を少なくして操作性の向上を図る。
【解決手段】ステアリングハンドル6の操作でパワステを介して左右の前輪4,4を操向制御するパワステコントローラ16をエンジンEとミッションケース3の合わせ部近傍で車両の左側に位置するスタータセルモータ12とエキゾーストマニホールド13の上下方向中間部に配置してあることを特徴とする作業車両とする。
(もっと読む)
植付作業機
【課題】マーカアームを上下揺動させるために支持部材に設けられた回動部材及び電装品を、カバー体によって覆って保護するにあたって、該カバー体の形状を簡素化できる植付作業機を提供することを課題としている。
【解決手段】マーカアーム36を支持部材41に支持し、マーカアーム36の下方揺動を規制する規制部43と、規制部43を回動部材43を介して上下回動作動させる電動アクチュエータ44と、回動部材46の回動位置を検出する検出センサ47とを備え、前記マーカアーム36を下方側に付勢する付勢部材42により、マーカアーム36を規制部43とともに上下揺動する植付作業機であって、マーカアーム36及び規制部43を支持部材41の前面側に配置するとともに、電動アクチュエータ44及び検出センサ47を含む電装品55並びに回動部材46を支持部材41の後面側に配置し、回動部材46及び電装品55を覆って保護するカバー体48を設けた。
(もっと読む)
作業車両
【課題】操向位置を検出する検出センサをシンプルな構成で容易に走行機体側へ設置できるとともに、設置した検出センサが圃場から飛散した泥水等の付着によって故障することを防止できる作業車両を提供することを課題としている。
【解決手段】操向位置を検出する検出センサ48を備えた作業車両であって、ステアリングシャフト33の回転を減速して前記検出センサ48に伝える減速機構47を、該ステアリングシャフト33に設け、検出センサ48からのステアリングシャフト33の回転によって、操向位置を検出する。
(もっと読む)
歩行型農業作業車
【課題】差動装置を備えた歩行型農業作業車のミッションケースを小型化する。
【解決手段】差動装置20は、2つの遊星歯車機構21と、回転自在に設けられたピニオンギア22と、を有する。2つの遊星歯車機構21がそれぞれ有するサンギア23同士は、その回転軸が同一軸線上に配置される。2つの遊星歯車機構21がそれぞれ有するインターナルギア部材27は、ピニオンギア22に噛み合う。2つの遊星歯車機構21がそれぞれ有するサンギア23は、車輪用モータ19の出力軸29に固定される。そして、2つの遊星歯車機構21がそれぞれ有するプラネタリキャリア24から、それぞれ駆動力が取り出される。この構成により、車輪用モータ19の出力軸29と、差動装置20からの出力の取り出し軸(車軸9)と、を同軸に配置することができるので、車輪用モータ19から差動装置20まで駆動を伝達するための部材(チェーン等)が不要となる。
(もっと読む)
作業車両の自動走行制御装置
【課題】自動走行による作業に必要な目標の数量を低減出来、その目標の設置の手間も低減出来る作業車両の自動走行制御装置を提供すること。
【解決手段】トラクタ1に設けられたカメラ部8と、カメラ部8により撮像される予め設置された遠目標200の画像情報に基づいて、直進走行を行う遠目標制御処理と、カメラ部8により撮像される作業の痕跡の画像情報に基づいて、倣い走行を行う倣い走行制御処理とを有する、トラクタ1の走行制御を行うカメラ制御部21及び車両制御部23とを備え、カメラ制御部21及び車両制御部23は、遠目標制御処理により直進走行を行わせた後、遠目標制御処理が解除され、トラクタ1が旋回された後、倣い走行制御処理により倣い走行を行わせる、トラクタ1の自動走行制御装置である。
(もっと読む)
乗用型苗移植機
【課題】 小型の走行車体を得ると共に、安全性を向上させる。
【解決手段】 変速レバー82を支持するレバー支持アーム90を設け、変速レバー82を中立位置に戻す中立復帰アーム83を支持軸71に設け、中立復帰アーム83には上部復帰ローラ83aと下部復帰ローラ83bを設け、変速レバー82が中立位置のときは、ブレーキペダル70を操作しても上部復帰ローラ83a及び下部復帰ローラ83bがレバー支持アーム90に接当せず、変速レバー82が前進側に操作されているときは、ブレーキペダル70の操作により下部復帰ローラ83bがレバー支持アーム90の下面に接当して変速レバー82を中立位置に戻し、変速レバー82が後進側に操作されているときは、ブレーキペダル70の操作により上部復帰ローラ83aがレバー支持アーム90の上面に接当して変速レバー82を中立位置に戻す構成とした。
(もっと読む)
乗用型苗植機
【課題】 本発明は、乗用型苗植機のコンパクト化を図るために、苗植付装置を走行機体の後部に極力近接させた状態で装着した場合でも、線引きマーカを格納姿勢にすれば苗植付装置の横幅内に収められて、真にコンパクト化が図られた乗用型苗植機を提供することを目的とする。
【解決手段】 乗用型苗植機において、該線引きマーカは機体に基部を軸支して上下揺動自在に設けた揺動アーム(23)に、回転体の外周部に複数の爪部を設けた回転式マーカ(27)を回転自在に軸支した支持アーム(26)を装着した構成とし、線引きマーカの格納状態で回転式マーカ(27)が苗載台(14)の上端よりも高い位置で且つ苗植付装置(3)の左右幅内に収まるように、揺動アーム(23)に支持アーム(26)を回動自在に装着してある。
(もっと読む)
作業車両
【課題】ミッションケース88に設けられた直進出力検出手段93と旋回出力検出手段95とを泥土等から保護するガード板353に関して、ミッションケース88に取り付け易い構造で且つ部品点数も少なくする。
【解決手段】ミッションケース88における左右一側面の上部側に、直進用及び旋回用油圧式無段変速機構53,54を内蔵する油圧変速ケース350を取り付ける。前記ミッションケース88のうち前記油圧変速ケース350と反対側の側面から横方向外向きに突出したPTO軸99の突端側に、PTOプーリ119を配置する。前記ミッションケース88のうち前記PTO軸99より下方に、前記直進用油圧式無段変速機構53の変速出力量を検出する直進出力検出手段93と、前記旋回用油圧式無段変速機構54の変速出力量を検出する旋回出力検出手段95とを、前後に並べて配置する。正面視で前記ミッションケース88と前記PTOプーリ119との間に位置するガード板353によって、前記両出力検出手段93,95の外周側を覆う。
(もっと読む)
水田除草ロボット
【課題】条間、株間を自由に移動し、且つ、安定した除草効果が得られる除草ロボットを提供する。
【解決手段】水田除草ロボット1は、水田の稲株が通過可能な逆凹状の空間を有したメインフレーム10は、その下部に、車輪19A,19B、車輪19A,19Bを回転駆動する駆動部11A,11B、車輪19A,19Bの前後に配置されて水田除草ロボット1に浮力を生じさせる第1のフロート20A〜20D、全部に設けられて水田内の稲株を検知するセンサレバー23A,23B、メインフレーム10に搭載されたセンサ類に基づいて駆動部11A,11Bを駆動し、車輪19A,19Bの回転を制御する。これにより、水田除草ロボット1は稲株を避けながら自律走行する。
(もっと読む)
歩行型田植機
【課題】構造を簡素化し、製造コストの削減を図ることが可能な歩行型田植機を提供する。
【解決手段】ハンドルフレーム111に回動可能に支持されて、作業状態、または非作業状態に切り替え可能なマーカー122を具備する歩行型田植機1であって、マーカー122と一体的に回動するように設けられる連結部(第一連結部)121Pと、ハンドルフレーム111と一体的に設けられる連結部(第二連結部)28bと、連結部121Pと連結部28bとの間に張架されて、回動支点部122bがその軸線方向から見て連結部121Pと連結部28bとを結ぶ直線の一側に位置する場合、マーカー122を付勢して前記作業状態に保持し、回動支点部122bがその軸線方向から見て連結部121Pと連結部28bとを結ぶ直線の他側に位置する場合、マーカー122を付勢して前記非作業状態に保持するスプリング(付勢部材)128と、を具備した。
(もっと読む)
自動走行ルートガイドツールおよび自動走行装置
【課題】簡単に設置が可能で、かつ、安価な走行ガイドツールと、該ガイドツールを基に方向転換しながら予め決められたルートを自動走行可能な自動走行装置を提供する。
【解決手段】識別情報が記憶されたRFIDチップを内蔵した走行ルートガイドツールであって、前記走行ガイドツールの視認可能な面に走行をガイドすべき自動走行装置が方向転換する時に基準となる位置と方向を示す印が表示されているように構成した。自動走行装置は、RFIDリーダと、カメラと、カメラ画像分析部と、識別情報に対応づけられた方向情報と、画像分析の結果得られた方向情報を基に転換方向を確定する制御部と、方向転換操舵機構とを有するように構成した。
(もっと読む)
乗用型農作業機
【課題】HSTのような無段変速機を備えた田植機において、変速等を司る操作部材の損傷防止と動作確実性とを図る。
【解決手段】操縦エリアのフロアー部26aは車体カバー26で構成されており、フロー部26aの下方にミッションケース18が配置されている。ミッションケース18の側面にはHST41が取り付けられている。HST41の出力制御軸61は上向きに突出している。車速を調節する出力制御アーム126,走行停止によって主クラッチを切るクラッチロッド155,ブレーキ入りとクラッチ切りとを関連させるクラッチアーム159といった操作部材は、全体又は一部がミッションケース18の上方に配置されている。ミッションケース18が操作部材に対する保護機能を発揮するため、操作部材の損傷を防止又は抑制できると共に、動きの確実性も向上できる。
(もっと読む)
農作業車
【課題】畝が形成されている圃場の表面に対しても、作業者が安楽な姿勢で作業することができる。
【解決手段】農作業車1は、走行手段により走行自在に支持された機体フレーム2を備え、該機体フレーム2には、圃場の表面に通ずる空間部5と、該空間部5に隣接して配置されており作業者Wが乗車する乗車部6とが装備されている。そして、乗車部6は、作業者Wが、上体をその後方に傾斜させた姿勢又は上体を寝かせた姿勢であって、少なくとも左右いずれか一方の手を空間部5を介して圃場の表面に届かせる位置に乗車可能に構成されている。
(もっと読む)
走行車両
【課題】走行機体に搭載されたエンジンの動力を変速する直進用及び旋回用変速機と、直進用変速機に対する直進操作具と、旋回用変速機の旋回操作具とを備えている走行車両において、操作系統の簡素化及び操作性の向上を図る。
【解決手段】互いに直交する旋回軸線及び変速軸線回りに回動可能な制御体を内蔵したステアリングボックス120を備える。旋回操作具の操作に伴う制御体の旋回軸線回りの正逆回動にて旋回用変速機54を作動させる一方、直進操作具の操作に伴う制御体の変速軸線回りの正逆回動にて直進用変速機を作動させるように構成する。ステアリングボックス120は、走行機体に設けられた操縦部9のうち走行機体1の左右中央側に位置するサイドコラム12内に配置する。
(もっと読む)
歩行型車両
【課題】コストの上昇を抑制しつつ急旋回を防止して狙いとする旋回ラインが容易に得られる歩行型車両を提供する。
【解決手段】
車両1が所定速度以上で走行している際に、旋回操作子33が左方又は右方に旋回操作されたとき、該車両1を減速させる旋回時減速機構55を備えた。
(もっと読む)
移植機
【課題】組み立てを簡略化し、組立性の向上を図る。
【解決手段】デフロック機構を操作するデフロックペダル34と、デフロックペダル34によるデフロック機構の操作荷重を調節するデフロック操作荷重調節部38と、各サイドクラッチ13のシフタアーム14をデフロックペダル34に連繋させ、ステアリングハンドル16の旋回操作に応じたサイドクラッチ13の切り作動を、デフロックペダル34の操作に応じて解除する左右の解除リンク33と、デフロックペダル34の操作に応じた解除リンク33の解除タイミングを調節する解除タイミング調節部44とを備え、デフロックペダル34、デフロック操作荷重調節部38及び解除タイミング調節部44を、予めベース部材47に組み付け、前側伝動ケースの後面部に一体的に取付可能とした。
(もっと読む)
移植機
【課題】部品の兼用化を図り、部品点数及びコストを削減する
【解決手段】ステアリングハンドル16の旋回操作に応じて、旋回内側の後輪7に対する動力伝動を自動的に断つ乗用型田植機であって、サイドクラッチ13のシフタアーム14を前輪操向機構17に連繋させ、ステアリングハンドル16の旋回操作に応じて、旋回内側のサイドクラッチ13を自動的に切り作動させるサイドクラッチ連繋機構29を備え、該サイドクラッチ連繋機構29は、ピットマンアーム22との当接により回動するカム部材31と、各サイドクラッチ13のシフタアーム14をカム部材31に連繋させる左右の連繋リンク32とを備えると共に、カム部材31を、ステアリング減速軸24を支点として回動させる。
(もっと読む)
移植機
【課題】サイドクラッチ連繋機構であるサイドクラッチのシフタ及び連繋リンクが、ステップ下のスペースを圧迫するという不都合を回避する。
【解決手段】ステアリングハンドルの旋回操作に応じて、旋回内側の後輪7に対する動力伝動を自動的に断つ乗用型田植機であって、サイドクラッチのシフタアームを前輪操向機構に連繋させ、ステアリングハンドルの旋回操作に応じて、旋回内側のサイドクラッチを自動的に切り作動させる左右の連繋リンク32を備え、サイドクラッチのシフタアーム及び連繋リンク32を、平面視においてメインフレーム9の左右外端位置よりも内側に配置する。
(もっと読む)
走行制御装置
【課題】車両が目標ランプに向かって自動的に走行するように制御する走行制御装置を提供する。
【解決手段】走行制御装置において、カメラは、車両走行の目標となる方向に位置する目標ランプを撮像する。画像処理部32は、カメラにより撮像した撮像画像を処理する。走行制御部36は、撮像画像に含まれる目標部画像の位置と車両の初期位置との関係で定まる目標走行ラインを走行するように車両の走行を制御する。ヨー角検出部42は、撮像画像から目標部に対する車両のヨー角を検出する。横偏差算出部50は、撮像画像から目標走行ラインからの横偏差を算出する。走行制御部36は、ヨー角および横偏差にもとづいて車両の走行を制御する。
(もっと読む)
1 - 20 / 78
[ Back to top ]