
Fターム[2B062AA10]の内容
移植機(田植機の要素) (4,646) | 目的、機能 (1,144) | 移植機等の性能向上 (1,000) | 電気的自動化 (31)
Fターム[2B062AA10]に分類される特許
1 - 20 / 31
作業機
苗移植機
【課題】
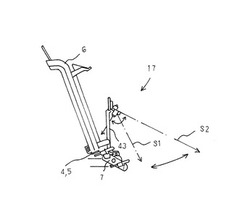
圃場の凹凸の多少、及び苗の植付姿勢を撮影装置で撮影し、撮影された画像に合わせて苗植装置の昇降、及び植付姿勢の安定化を自動的に図る苗移植機を提供する。
【解決手段】
苗取口4を形成した苗受ガイド5に送る苗タンク6と、苗タンク6の下部に設ける圃場面を滑走するセンタフロート1とサイドフロート2と、苗取口4を下降して苗を植え付ける植付装置7を設けて苗植装置8を構成し、苗植装置8を前輪10及び後輪12を備えた走行車体14の後側に装着した苗移植機において、苗植装置8の上方位置に圃場面の凹凸を表わす画像を撮影する撮影装置17を設け、撮影装置17が撮影した画像で圃場面の凹凸の多少を判別し、圃場面の凹凸が多いときは昇降リンク16を昇降させる昇降シリンダ15の昇降制御感度を低下し、圃場面の凹凸が少ないときは昇降シリンダ15の昇降制御感度を上げる制御構成とする。
(もっと読む)
苗移植機

【課題】補給用のマット苗を収容する多段の苗載台を直列展開可能に構成した予備苗枠を備えた苗移植機において、予備苗枠の展開したまま機体が走行することによる不測の事態を回避することが可能な苗移植機を提供する。
【解決手段】苗移植機は、走行車体2と、移植部と、多段構成の苗載台を備えた予備苗枠38とを備えて構成され、この苗載台を移動リンク部材によって多段の収納位置から前後に直列する展開位置までの範囲で開閉可能に支持して構成され、上記苗載台が収納位置を外れて展開過程にあることを検知する苗枠状態検知部材と、機体走行を検知する走行検知部材と、この走行検知部材による走行検知の際に苗枠状態検知部材による展開過程の検知を条件として報知する報知部材とを設けた。
(もっと読む)
苗移植機
【課題】ぬかるみやすい圃場における安定走行の確保とともに、ぬかるみにくい圃場における燃費向上および排ガス低減を可能とする苗移植機を提供する。
【解決手段】苗移植機は、エンジン(5)の動力を変速して走行装置(2,3)および苗移植装置(6)に伝動する変速伝動装置(4)、変速レバー(4a)の指示に応じてエンジン(5)および変速伝動装置(4)を動作制御する制御装置(11a)等を設けて植付け走行可能に構成され、上記制御装置(11a)は、変速レバー(4a)の指示に対するエンジン回転の動力特性が、低燃費走行用の低回転モード(L)と、通常の回転による標準モード(M)と、ぬかるみ走行用の高回転モード(H)のいずれかを選択可能に構成するとともに、変速レバー(4a)の指示が停車時の停止速および発進直後の低速域の範囲について高回転モード(H)を適用するものである。
(もっと読む)
苗移植機
【課題】
畦際の旋回痕を整地ロータで充分に均し、圃場均平用フロートで均平にすることで、畦際での苗の植付深さを揃える苗移植機を提供することにある。
【解決手段】
走行車体2の後部に整地ロータ27とフロート55,56と苗植付装置52を設けた苗植機において、左右の整地ロータ27a,27bをそれぞれ独立昇降自在に構成し、畦際での植付作業を検出する畦際検出部材SAを設け、畦際検出部材SAで検出した畦側の整地ロータ27a,27bを反対側の整地ロータ27a,27bよりも下方へ降下させ、畦際検出部材SAを、左右の畦クラッチレバー71,71の操作を検知する左右の畦クラッチスイッチ71a,71bで構成し、左右の畦クラッチスイッチ71a,71bを操作すると左右の整地ロータ27a,27bのいずれか一方を下方に下降させる構成とする。
(もっと読む)
苗移植機
【課題】予備苗載せ台を展開状態と収納状態とに切り替える際の作業者の労力や負担を軽減すると共に、作業能率が向上する苗移植機の提供である。
【解決手段】走行車体2の支持フレーム49に支持される複数の予備苗載せ台38と、予備苗載せ台38と支持フレーム49との間のリンク機構Kと、支持フレーム49に連結するアクチュエータ81と、アクチュエータ81及びリンク機構Kに連結する回転部材(70,82など)とを備え、予備苗載せ台38を展開状態と収納状態とに切り替える切替装置80と、切替装置80のスイッチ71と、スイッチ70のセンサ72と、ハンドル34の切れ角センサ33と、スイッチ71操作に応じてアクチュエータ81を作動すると共にハンドル34の操向角度が所定角度以上になると切替装置80のアクチュエータ81を駆動する制御装置100とを設けた苗移植機により、作業者の労力や負担を軽減し、作業能率が向上する。
(もっと読む)
水田作業機
【課題】エンジンによる燃料の無駄な消費を抑制したり、騒音の低減を図ることが可能となるものでありながら、エンジンが停止している状態でバッテリーの充電量が大幅に低下することを回避することが可能な水田作業機を提供する。
【解決手段】キースイッチ90がオン操作されている状態において、エンジン12の作動を停止させるエンジン自動停止処理、及び、エンジン12の作動を停止させたのちにエンジン12を始動させるエンジン自動始動処理を実行する制御装置Hが、エンジン自動停止処理を実行したのちにおいてもバッテリーVから機体各部への電力供給を維持し、且つ、エンジン自動停止処理を実行してからエンジン自動始動処理を実行しない状態が設定時間以上継続すると、バッテリーVから機体各部への電力供給状態を電力消費が無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている。
(もっと読む)
水田作業機
【課題】エンジンを停止させることが適切ではない場合にエンジン自動停止制御を実行することによる不都合を回避しながら、燃料消費の抑制や騒音の低減を図ることが可能な水田作業機を提供する。
【解決手段】機体各部の作動を制御する制御手段が、牽制条件が成立していれば、エンジン停止条件が成立してもエンジン自動停止制御を実行しないように構成され、牽制条件が、作業装置が田面よりも上方に位置しているという条件、走行機体又は作業装置が水平面から設定傾斜角以上傾斜しているという条件、作業装置に備えられた左右両側のマーカーが夫々収納状態であるという条件、及び、走行用の変速装置が水田作業用変速状態とは別の変速状態に切り換えられているという条件、のうちの少なくもいずれか1つの条件である。
(もっと読む)
乗用型田植機
【課題】苗載台上に載置したマット苗の残量低下に伴う苗継ぎや苗補充作業のように、比較的頻繁に行われる作業において、オペレータが操作しなくてもエンジンの回転数をアイドリング状態まで速やかに低下させると共に、自走移動による畦越えや運搬車両の荷台への積み降ろし作業を行なう際、エンジンの回転数が不測に停止することを防止して、オペレータが降車した状態で安全且つ的確な作業が行なえるようにする。
【解決手段】苗切れまたは肥料切れ状態をオペレータに知らしめる警報手段72a,72bが作動可能状態且つ駐車ブレーキが作用中であって、苗残量検出センサ61による苗切れの検出または肥料残量検出センサ62による肥料切れの検出がなされると共に、着座状態検出センサ73による運転座席12へのオペレータの非着座状態が検出された時、エンジンEの回転数をアイドリング状態まで自動的に低下させるエンジン回転数制御手段81を設けた。
(もっと読む)
田植機
【課題】 次回の走行指標を田面に形成するマーカを機体横方向に突出した作用姿勢と機体側に後退した格納姿勢とに切換え可能に装備した田植機において、マーカを畦などの障害物に不用意にぶつけてしまうことを未然に回避できるようにする。
【解決手段】 走行機体3が障害物Bに接近することを検知する検知手段38を備え、障害物Bへの設定以上の接近が検知されると作用姿勢のマーカ12を自動的に格納姿勢に切換えるマーカ自動切換え手段を備えてある。
(もっと読む)
苗移植機
【課題】作業管理ができるように実際に行った苗植付面積を知り得る装置を備えた苗移植機を提供すること。
【解決手段】作業モニタ装置33は、後輪回転センサ17の走行速度に基づき走行車体の走行距離を計測する制御装置100の走行距離計測手段100aと該走行距離計測手段100aによる走行距離の計測に基づいて算出される植付面積を算出する植付面積算出手段100bと、に基づきモニタ画面に表示がなされる走行距離表示部33aと走行距離に基づいて算出される苗植付面積を告知する苗植付面積告知部33bを備え、また苗植付部4の一部の植付条のみを非植付状態にする畦クラッチレバー19の作動に基づいて苗植付面積を補正する植付面積補正手段100cを備えているので、苗植付部4の一部の植付条のみを非植付状態にしたことを制御装置100に送信してその結果を苗植付面積告知部33bに表示できる。
(もっと読む)
農作業機
【課題】 従来、走行車体の後進時に農作業装置が上昇するようになっているため、農作業装置の接地作業状態でのひきづりが発生し安全上に問題があった。本発明は、後進操作前に農作業装置を上昇させることによって、農作業装置のひきづりを防止し安全性を確保することにある。
【解決手段】 走行車体の後部に農作業装置を昇降可能に設け、前後進切替可能な操作レバー40の操作経路を一方向に延びる前後進中立経路41Nと、前後進中立経路に交差して接続される前進経路41F及び後進経路41Rとを備え、前進経路41Fと後進経路41Rとが前後進中立経路41Nに交差する位置を異ならせてクランク状に構成し、前後進中立経路41Nの後進経路41R側端部は、後進経路41Rと交差する位置を越える位置にあり、該位置には前記操作レバー40が操作されたことを検出する検出手段42の検出結果に基づいて農作業装置を上昇させる制御手段44を備える。
(もっと読む)
移植機
【課題】運転席外の移植機周辺にいる作業者が苗切れや肥料切れを容易に認識することができる移植機を提供することを課題としている。
【解決手段】苗の植付けを行う植付作業機8と、圃場に肥料の施肥を行う施肥機構とを備えた移植機に、植付作業機8の両側端部に設けられたランプを備えてなる植付け用の苗の苗切れを報知する苗切れ報知手段と、施肥用の肥料の肥料切れを報知する肥料切れ報知手段とを設けた。上記ランプを植付作業機8の両側端部に設けたウインカランプ16に兼用させた。
(もっと読む)
乗用型苗移植機
【課題】旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】左右前輪6を所定角度以上に操向操作すると苗移植作業装置3を上昇させる指令を出力して苗移植作業装置3を上昇させ、且つ、走行距離算出手段にて走行距離を算出して、該走行距離に応じて苗移植作業装置3が下降する指令を出力する自動旋回制御を行なうと共に、マーカ作動操作具220の左右線引きマーカ195の作動を停止させる操作にて該自動旋回制御を行わない状態に切り替える制御装置170を設けた乗用型苗移植機。
(もっと読む)
作業車両
【課題】作業車両の走行中及び走行車体に連結される作業装置の実作動時間を正確にカウントして作業時間の計測を行うことができる作業車両を提供すること。
【解決手段】作業時間(実際にエンジン20が駆動している状態、作業車両1が作動している状態又は苗植付部4の苗植付装置52が作動している状態にある時間)を計測する作業時間カウンターを備え、(1)走行車体2の走行停止状態に連動して作業時間カウンターによる作業時間の計測を中断させるか、(2)エンジン20の非駆動状態に連動させて作業時間カウンターの作業時間の計測を中断させるか、又は(3)苗植付部4の苗植付装置52の作動停止状態に連動させて作業時間カウンターの計測を中断させる制御装置100を備えたエンジン20を搭載して走行する走行車体2と該車体2に連結した苗植付部4を備えた作業車両である。
(もっと読む)
移植機
【課題】次回の旋回方向を正確に判断すると共に、判断した旋回方向に対応しない左右車輪の回転差を無視し、旋回開始タイミングの誤認を防止する。
【解決手段】植付部3から左右外側方に選択的に振り出され、次植付行程に走行基準線を引くマーカ9L、9Rと、走行機体1の左後輪回転及び右後輪回転に基づいて走行機体1の旋回を判断する制御装置24とを備えた移植機において、前記制御装置24は、マーカ9L、9Rの振り出し方向に基づいて次回の旋回方向を判断すると共に、判断した旋回方向に対応する左右後輪8の回転差に基づいて旋回開始を判断する。
(もっと読む)
移植機
【課題】旋回中のスリップなどに影響を受けることなく、一定のタイミングで植付クラッチを自動的に入操作し、各行程の植付開始位置を精度良く揃える。
【解決手段】走行機体1に連結される植付部3と、該植付部3への動力供給を入切する植付クラッチとを備える乗用田植機(移植機)において、走行機体1の左車輪回転及び右車輪回転を検出し、その検出信号に基づいて植付クラッチを自動的に入操作する制御装置9を備え、該制御装置9は、左右車輪8の回転差が所定以上となることに基づいて旋回開始を判断し、旋回開始判断後、左右車輪8の回転差が所定以下となることに基づいて旋回終了を判断し、さらに、旋回終了を判断してから所定距離走行後に植付クラッチを自動的に入操作する。
(もっと読む)
作業車の電気回路構造
【課題】 作業車の電気回路構造において、フラッシャユニットを使用して報知手段を間欠的に作動させるように構成する場合、耐久性の高い電気回路構造を得る。
【解決手段】 発電機19、フラッシャユニット24、報知手段26を備えて、発電機19にフラッシャユニット24と報知手段26とを並列的に接続する。所定状態の検出に基づいてフラッシャユニット24と報知手段26とを通電状態とする検出手段28,29を備える。
(もっと読む)
圃場作業車両
【課題】簡易な構成で信頼性の高い制御部により自律直進操舵制御の不安定化を回避して異常走行を確実に防止することができる圃場作業車両を提供する。
【解決手段】圃場作業車両1は、機体方向を示す機体方位情報9に基づき、別途設定の目標方位に対する機体方位の偏差が小さくなる方向に操向装置の舵角を操作する自律直進操舵制御を行う制御部21を備えて構成され、上記制御部21には、方位偏差の低減に適する走行速度を基準速度として別途設定し、機体の走行速度情報25に基づいて同走行速度が上記基準速度に満たない範囲について上記自律直進操舵制御を強制解除するものである。
(もっと読む)
農用作業車の制御装置
【課題】田植機において畔際での苗植付部の自動旋回制御を安定させる。
【解決手段】旋回走行しうる田植機(1)に対して昇降可能な苗植付部(7)を設け、田植機(1)には苗植付部(7)の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備え、田植機(1)の左右両側には外側に突出状態としたり、内側に収納状態とすることのできる予備苗載せ台14を設け、予備苗載せ台14の機体内側への収納状態のときには、自動旋回制御装置の作動を牽制する牽制手段を設ける。
(もっと読む)
1 - 20 / 31
[ Back to top ]