
Fターム[2B062CA12]の内容
移植機(田植機の要素) (4,646) | 制御 (808) | 連動制御 (503)
Fターム[2B062CA12]の下位に属するFターム
位置←→位置 (147)
速度←→位置 (64)
クラッチ←→作業機位置 (54)
クラッチ←→車輪の位置 (35)
土壌硬度←→速度 (9)
速度←→速度 (10)
位置、速度←→株の状態 (2)
センサーによる連動制御 (156)
Fターム[2B062CA12]に分類される特許
21 - 26 / 26
乗用型苗植機
【課題】 適切な位置で苗の植え付けができる制御装置を備えた乗用型苗植機を提供すること。
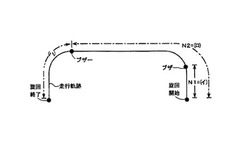
【解決手段】 エンジンからの動力が伝達される伝動装置と、該伝動装置からの出力で駆動する左右の後輪と、該後輪への伝動を入り切りするサイドクラッチと、昇降自在の苗植付部と、走行距離を検出する走行距離検出センサと、操向操作用のハンドルを走行車体に設け、ハンドルの操作角度が所定値以上になると走行距離検出センサにより走行距離の検出を開始し、該走行距離が設定距離に達すると報知する報知装置を設けたことを特徴とする乗用型苗植機とした。
(もっと読む)
水田作業機の作業装置昇降構造

【課題】 前輪が直進位置側から右又は左に操向操作されると作業装置を自動的に上昇駆動する自動上昇手段を備えた水田作業機の作業装置昇降構造において、作業行程の途中で作業装置が自動的に上昇駆動、または上昇させた作業装置を自動的に下降駆動されて作業が中断される状態を防止する。
【解決手段】 前輪1が直進位置側から前記右又は左の設定角度A1に操向操作されると、前記駆動機構7により前記作業装置6を上昇駆動する自動上昇手段を備えると共に、上昇させた作業装置6を下降駆動させる制御手段を備え、機体走行距離が設定された走行距離に達していなければ、下降状態にある作業装置6を自動的に上昇させる自動上昇手段の作動を阻止し、上昇させた作業装置6を自動的に下降駆動させる自動下降手段の作動を阻止する。
(もっと読む)
農用作業車
【課題】GPSにより車体位置を計測しつつ、自律的に直進走行する農用作業車において、次工程への遷移時に植付け開始位置の位置決めが容易にできる技術を提供する。
【解決手段】GPSユニット102と、処理部110を備え、GPSユニット102により計測される位置情報に基づいて、処理部110によりティーチング経路を生成し、さらに、処理部110により前記ティーチング経路に対して平行な目標経路を生成し、該目標経路上を自律的に走行する田植機1において、オペレータにより、自律運転SW48が操作されることにより、次の目標経路へ向けて自動的に旋回し、かつ、旋回動作の終了後に引き続き、前記次の目標経路上を自律的に走行するように構成する。
(もっと読む)
乗用型苗植機
【課題】実際の田植作業では昇降制御のセンサーである整地フロートはローリング制御による苗植装置の傾斜修正作動にて泥面から押上げ力を受けて上動する為に、苗植装置は上昇作動してしまい、苗の植付け深さが浅くなって苗が浅植えになったり植付けられなかったりする事態が発生した。
【解決手段】苗植装置25に設けた接地センサー32の接地圧が所定値に維持されるように昇降駆動装置28を制御する昇降制御手段と、苗植装置25の左右傾斜角度を検出する傾斜センサー64の検出値が所定値に維持されるようにローリング駆動装置60を制御するローリング制御手段とを備え、該ローリング制御手段によるローリング駆動装置60の作動中または作動中及び作動後の所定時間は昇降制御手段による苗植装置25を昇降駆動装置28にて上昇作動させる制御を牽制する制御装置51を設けた乗用型苗植機。
(もっと読む)
乗用型作業機
【課題】前輪に対する操向操作を行うだけで、旋回内側の後輪を制動させて旋回を操作性良く行える乗用型田植機があるが、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入切操作や上下動操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性において課題があった。
【解決手段】操向用の左右前輪6・6とエンジン12からの動力を変速する伝動装置からの出力で駆動される左右後輪7・7を備え、左右後輪7・7への駆動を各別に入り切りする左右サイドクラッチI・Iを設けた乗用型作業機おいて、左右前輪6・6を所定の速度以上の速さ又は所定以内の均一な操向速度で所定角度以上に操向操作すると、旋回内側となる後輪7のサイドクラッチIを切り、旋回内側となる後輪7の回転数の検出に基づいて走行距離を算出して、旋回時の諸作業用の作動を自動的に行わせる制御装置170を設けた乗用型作業機。
(もっと読む)
移植機における昇降制御装置
【課題】 移植機の昇降制御装置においてエンジンコントロールレバーと感度調節レバーとフロート側とのシンプルな連結構造を提供することを課題としている。
【解決手段】 エンジン6の回転数を調節するエンジンコントロールレバー74により操作されるコントロールワイヤ73と、移植作業機10に上下動自在に支持された接地フロート14の姿勢を揺動自在に設定するフロートワイヤ71とを連結具25を介して直結し、該連結具25が、接地フロート14の圃場の土圧に応じた上下動に基づく移植作業機10の昇降制御の感度を調節する感度調節レバー50の所定のポジションに対して所定の範囲でフロートワイヤ71の操作を許容し、且つ感度調節レバー50の揺動操作により両ワイヤ71,73の操作方向にスライドせしめられる。
(もっと読む)
21 - 26 / 26
[ Back to top ]