
Fターム[2B062CA16]の内容
移植機(田植機の要素) (4,646) | 制御 (808) | 連動制御 (503) | クラッチ←→作業機位置 (54)
Fターム[2B062CA16]に分類される特許
1 - 20 / 54
苗移植機
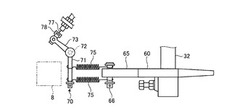
【課題】メカロックを発生させることなく、旋回時により確実に苗植付部を上昇させることのできる苗移植機を提供すること。
【解決手段】苗移植機1に、走行車体2に設けられて走行車体2を操舵するハンドル31と、走行車体2の後部に配設されると共に、苗を圃場に植え付ける苗植付部40と、苗植付部40を上昇させることができる苗植付部上昇機構50と、ハンドル31を操舵することにより回動するステアリングアーム60と、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができるオートリフト作動アーム70と、伸縮性を有してステアリングアーム60とオートリフト作動アーム70とを連結することにより、双方の距離が変化可能な状態でステアリングアーム60の回動をオートリフト作動アーム70に伝達する連結スプリング75とを備える。
(もっと読む)
田植機

【課題】植付部の上昇をともなうことなく植付部の駆動を停止させることができ、圃場面に苗を植え付ける植付作業の作業性の向上を図った田植機を提供する。
【解決手段】植付部3の昇降を切り替える昇降シリンダ43と、植付クラッチ33の入切を切り替えるクラッチモータ34と、植付部3の下部に設けたセンターフロート38の接地を検出するフロート接地検出手段21と、クロスレバー61の操作を検出するレバー位置センサー62と、植付部3の昇降と植付クラッチ33の入切を制御するコントローラ46とを備え、クロスレバー61は中央を中立位置とし、少なくとも2方向に操作可能な中央復帰型スイッチで構成し、コントローラ46はセンターフロート39の接地が検出され、且つ植付クラッチ33がON状態のとき、クロスレバー61が1回上昇操作されると昇降シリンダ43を作動させず、クラッチモータ34を作動させて植付クラッチ33をOFF状態にする。
(もっと読む)
田植機
【課題】旋回時自動昇降制御において苗の空植えを防止する。
【解決手段】田植機1は、上下に昇降可能な植付部3と、植付部3への駆動力を断接制御する植付クラッチ50と、車体旋回時に植付部3の昇降及び植付クラッチ50を制御する旋回時自動昇降制御を行う制御部と、を備える。旋回時自動昇降制御において、制御部は、旋回中又は旋回終了後の所定のタイミングで植付部3を自動的に下降させる。また制御部は、旋回終了後に、旋回開始前の植付中断位置に対応する植付再開位置まで車体が到達したときに植付クラッチ50を接続して植付を再開する。そして当該制御部は、植付部3を下降させるタイミングを、車体の走行速度に応じて変更する。
(もっと読む)
田植機
【課題】植付クラッチとロータクラッチを任意のタイミングで入切できる田植機を提供する。
【解決手段】植付クラッチ19bは、入切作動させる植付側操作アーム64と連動連結され、ロータクラッチ17cは、入切作動させるロータ側操作アーム65と連動連結され、前記植付側操作アーム64と前記ロータ側操作アーム65は、制御カム63に当接され、該制御カム63は、アクチュエータとなるクラッチモータ66により回転駆動され、該制御カム63の回転により前記植付クラッチ19bと前記ロータクラッチ17cをそれぞれ入切可能に構成されるものである。
(もっと読む)
田植機
【課題】田植機1において、端寄せ作業の作業性及び苗載台29の停止位置の精度を向上させると共に、端寄せ作業の実行を直感的に把握できるようにする。
【解決手段】本願発明の田植機1は、左右横送り可能な苗載台29及び複数の植付爪30を有し且つ走行機体2の後部に装着された苗植付装置23と、前記苗植付装置23への動力伝達を継断するPTOクラッチ75と、前記苗載台29を左右一方の移動端まで横送りして停止させる端寄せモードを実行するための端寄せボタン71とを備える。前記端寄せボタン71には、前記端寄せモードを開始する機能と、実行中の前記端寄せモードを取り止める機能とを持たせる。
(もっと読む)
田植機
【課題】田植機1において、端寄せ作業の作業性及び苗載台29の停止位置の精度を向上させると共に、例えば咄嗟の場合にも確実に端寄せ作業を取止めできるようにする。
【解決手段】本願発明の田植機1は、左右横送り可能な苗載台29及び複数の植付爪30を有し且つ走行機体1の後部に装着された苗植付装置23と、前記苗植付装置23への動力伝達を継断するPTOクラッチ75と、前記PTOクラッチ75を入り切り操作するためのクラッチ操作具16と、前記苗載台29を左右一方の移動端まで横送りして停止させる端寄せモードを実行するための端寄せ操作具71とを備える。前記クラッチ操作具16には、そのクラッチ切り操作にて実行中の前記端寄せモードを取り止める機能を付加する。
(もっと読む)
走行車両
【課題】 本発明の課題は、8条植えなどの多条植え用であっても適切な位置で苗の植え付けができる旋回連動制御装置を備えた乗用型作業機などの走行車両を提供することである。
【解決手段】 走行車両において、ステアリング機構に連動して旋回内側の走行推進体の駆動力を断つか制動する旋回連動機構と、走行推進体の伝動軸回転数検出手段と、走行車体の旋回時に、伝動軸回転数検出手段の検出による左右の走行推進体の回転数に基づき、旋回内側の走行推進体の回転数が旋回外側の走行推進体の回転数よりも小さい該旋回外側の走行推進体の回転数の所定値以下になれば、旋回内側の走行推進体を駆動することにより、旋回内側の走行推進体を駆動する状態と旋回内側の走行推進体の駆動力を旋回連動機構により断つか制動する状態を繰り返す断続的制御を実行する制御装置を備えた。
(もっと読む)
田植機
【課題】 本発明の課題は、機体旋回後の農作業装置の取扱いを可能な範囲で旋回動作と連動して自動処理することにより、オペレータの負荷を最小限度に抑えることができる自動植付作業車用制御装置を提供する点にある。
【解決手段】 旋回開始時のハンドル操作に基づいて後輪のドライブシャフト回転のカウントを開始し、植付部が下降状態で、その後の操舵ハンドルのハンドル角度が規定値以上でなく直進状態に戻した操作状態であることを条件に、更にその後、前記カウントが植付部を下降させたときの第一の所定値よりも大きい第二の所定値になったとき、植付クラッチを入にする連動制御を備え、植付部が下降状態で、その後の操舵ハンドルのハンドル角度が規定値以上であれば、連動制御を終了する制御装置を設けた田植機とした。
(もっと読む)
作業車両
【課題】走行停止状態での待機時間を不要としつつ、後進走行中に従来より短時間に作業機を上昇できる作業車両を提供すること。
【解決手段】機体2の後部に苗移植装置7を装着するためのリンク機構8と、リンク機構を昇降させる昇降装置30と、機体2に設けられたエンジン6と、エンジン6の動力を変速して出力する変速装置5と、前進走行域、停止域、及び後進走行域の何れかの位置に切り替えることにより、変速装置の出力を変化させて走行速度を操作する走行操作レバー10と、走行操作レバー10が少なくとも後進走行域にある場合に苗移植装置7の上昇速度をエンジン回転数に基づいて制御する第1の制御を行う制御部200とを備え、第1の制御は、走行操作レバー10が、後進走行域の内、走行速度を最高に設定する最高速位置にあるときのエンジン回転数よりも、最高速位置より手前の位置にあるときのエンジン回転数の方を高くする制御である、作業車両。
(もっと読む)
苗移植機
【課題】
苗載せ台を畦際側とは反対側へ移動させるときは、苗植機の走行を直ちに停止して、植付装置の植付操作を停止して、苗タンクを目的の方向へ大きく移動させて、苗移植機の旋回操作等を行わせる。又、この一旦横端へ移動させていた苗タンクを移動前の苗植付停止位置に戻してから、苗移植機の植付動作を行わせる必要があり、煩雑で正確な操作を要し、相当の時間と熟練を要する。
【解決手段】
植付装置3の伝動を停止した状態で苗タンク2を横端へ移動させるときの、摺動軸1の横送回転数をタンク送りセンサ6で検出し、この苗タンク2が横端に移動した後に前記苗植作用を開始するときは、前記タンク送りセンサ6が検出した横送回転数に基づいて摺動軸1を伝動回転して、前回苗植停止位置に苗タンク2を移動復帰する構成とする。
(もっと読む)
田植機
【課題】苗載台を正確に苗台端位置に移動させて、欠株を防止することができる田植機を提供することである。
【解決手段】苗載台41を苗台端位置に移動させる信号が入力されると、苗載台41が第一所定速度で移動するように変速モータ71を駆動制御して、苗台位置検出により前記苗載台41が前記苗台端位置より手前の所定位置に到達したことを検出すると、前記植付クラッチ55が「切」となるように植付クラッチモータ73を駆動制御するとともに、前記苗載台41が前記第一所定速度よりも遅い第二所定速度で移動するように変速モータ71を駆動制御するものである。
(もっと読む)
苗移植機
【課題】圃場が荒れやすい枕地あるいは枕地近くにおいて適正に整地が行え、苗の植付精度が良くなる畦クラッチ自動復帰装置付きの苗移植機を提供すること。
【解決手段】車体2の植付部4を上昇させる上リンク40と畦クラッチレバー19をケーブル等で連結することにより、上リンク40の上昇運動を畦クラッチに伝動させる電動機構を設け、上リンクの上昇運動に伴って、連携機構A,Bを介して畦クラッチのスイッチを「入」状態にすることを可能とした。同時に、該連携機構A,Bに整地ロータクラッチ39のクラッチケーブル99を連結し、上リンク40の上昇により整地ロータのスイッチを「入」にすることを可能とした。
(もっと読む)
乗用型移植機
【課題】運転座席に座ったままの姿勢であっても、整地装置の作業高さ調節を容易に行うことができるようにする。
【解決手段】植付作業機5の前方に整地装置6を備える乗用型田植機1において、運転座席2の後方に、整地装置6の昇降操作具と整地クラッチの入り/切り操作具とを兼ねる操作レバー21を設けるにあたり、該操作レバー21を、運転座席2に座った姿勢で操作可能な位置であって、かつ、機体の左右中心に対して一側方に偏倚した位置に配置すると共に、操作レバー21の操作方向を左右方向とし、該レバー操作領域の機体外方側に、整地クラッチを切りとし、かつ、整地装置6を格納高さまで上昇させる格納操作領域R1を設ける一方、レバー操作領域の機体内方側に、整地クラッチを入りとし、かつ、整地装置6の作業高さを調節する作業操作領域R2を設ける。
(もっと読む)
移植機
【課題】非植付走行時に植付クラッチ入れ忘れ警報を行ってオペレータに不快感を与えるという問題を解決する。
【解決手段】走行機体1の後部に昇降自在に連結され、下降接地状態で植付作業を行う植付作業機3と、植付作業機3の植付動力を入り/切りする植付クラッチ21と、植付作業機3から左右外方に選択的に振り出されて次行程に走行基準線を引く左右一対のマーカ33L、33Rと、植付作業機3の下降時にマーカ33L、33Rを自動的に振り出すマーカ自動制御手段(制御部35)とを備える乗用型田植機において、植付クラッチ21を入れ忘れた状態で植付走行を開始した、または、開始する可能性があると判断したとき、所定の警報を行う植付クラッチ入れ忘れ警報手段(制御部35の警報制御)を備えると共に、マーカ自動制御がOFFのときは、植付クラッチ入れ忘れ警報手段による警報を行わないようにする。
(もっと読む)
農作業機
【課題】 機体の旋回制御において、圃場状況や作業形態に応じて更なる作業性向上を図ると共に、作業開始位置あるいは作業終了位置の更なる適正化を図ることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止してからの走行距離が所定の設定走行距離に到達するか又は機体の畦際旋回時に農作業装置の作動を停止してからの時間が所定の設定時間に到達すると自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動停止時又は作動開始時の機体の向きに対する畦の角度を判別する畦角度判別装置と、機体の旋回方向を判別する旋回方向判別装置102を設け、制御装置は、畦角度判別装置と旋回方向判別装置102とに基づき、機体の旋回方向が畦から離れる側であるときに前記所定の設定走行距離を小さく補正し、機体の旋回方向が畦に近づく側であるときに前記所定の設定走行距離を大きく補正する構成とした。
(もっと読む)
農用走行車輌
【課題】ブレーキペダルの踏込みにより主変速レバーを自動的に中立位置に移動する機構を備えた農用走行車輌において、ブレーキ状態での作業機の運転点検を可能とする。
【解決手段】副変速レバーが中立位置以外の位置(植付)にあっては、ロック部材76がワイヤー82を介して回動し、切欠き部76a,75bの間にロックピン77を挟んで、主変速レバー22と主変速操作部材75とを一体に回動する。この状態では、ブレーキペダルを踏むことにより、融通機構75c,79を介して主変速レバー22を中立位置に移動する。副変速レバーを中立位置にすると、ロックピン77を介する連係を解除して、主変速レバー及びブレーキペダルが独立して操作可能となる。
(もっと読む)
乗用田植機
【課題】所望の箇所で正確に苗植付装置を下降可能な乗用田植機を提供する。
【解決手段】制御部50が、旋回時前期にて、植付クラッチ51、サイドクラッチ55をこの順に切り、旋回時後期にて、サイドクラッチ55、植付クラッチ51をこの順に入れる。そして、エンジン12から後輪17へ駆動力の伝達するための出力軸EOをサイドクラッチ55の上流側に備え、後輪17の回転数を検出する回転センサ54を出力軸EOに設け、旋回時後期にて、植付クラッチ51を入れるタイミングを、旋回時における植付クラッチ51を切ってからサイドクラッチ55を切るまでの間の回転センサ54の回転数と既定の回転数との和に基づいて制御部50が決定する。
(もっと読む)
農業用作業車両
【課題】簡単な構成で旋回操作の開始及び終了を検出することが可能な農業用作業車両を提供する。
【解決手段】サイドクラッチ操作機構45は、ステアリングハンドル7が所定の操作量以上操作された場合に、サイドクラッチを切断する。クラッチセンサ49L,49Rは、サイドクラッチの作動状況を検出可能である。制御部は、植付部を昇降駆動するための昇降シリンダの駆動を制御する。植付クラッチは、植付部に対する駆動力の伝達の有無を切換可能である。また、前記制御部は、植付部の作動中において、植付クラッチの切断、サイドクラッチの切断、及び後進操作を、旋回時自動昇降制御の開始トリガとして検出可能である。そして、前記制御部は、開始トリガのうち何れか1つを検出すると、植付部を上昇させ、その後、前記サイドクラッチの接続を検出すると、植付部を下降させる。
(もっと読む)
水田作業機
【課題】植播系作業装置の昇降に関連して作動するように構成された昇降関連作業装置の作動を、不要な誤操作などを生じる虞少なく行えるようにする。
【解決手段】植播系作業装置の昇降作動方向、及び植播系作業装置が所定高さ位置H2の上側または下側の何れの側に位置するかの判別結果に基づいて、昇降関連作業装置の作動状態を、昇降作動行程中における所定高さ位置H2の上側と下側とで互いに作動状態が異なり、かつ所定高さ位置H2の下側における作動状態が、昇降作動行程の上昇行程でも下降行程でも同じ作動状態に維持されるように構成し、所定高さ位置H2を変更可能にした。
(もっと読む)
作業車両
【課題】
本発明の課題は、旋回時の車速が速く設定されている場合にあっても、植付作業部をタイミング良く下降させて畦に対する干渉や空植えを防止することにある。
【解決手段】
この発明は、操向ハンドルの左右旋回操作によって前輪が左又は右に操向操作されると、旋回外側の後輪の回転速度に対して旋回内側の後輪の回転速度が所定速度以下になったとき旋回内側のサイドクラッチを強制的に「入」にして旋回内側の後輪を所定の回転量だけ強制駆動する旋回制御手段(TC)を備えた作業車両において、機体旋回時に作業部を上昇させ、機体旋回開始後、所定角度旋回すると作業部を所定位置に下降させる作業部昇降制御手段(UD)を備え、車速が速く設定されている場合には、作業部の下げ速度を増速制御する下降速度制御手段(DV)を設けてあることを特徴とする。
(もっと読む)
1 - 20 / 54
[ Back to top ]