
Fターム[2B062CA14]の内容
移植機(田植機の要素) (4,646) | 制御 (808) | 連動制御 (503) | 位置←→位置 (147)
Fターム[2B062CA14]に分類される特許
1 - 20 / 147
苗移植機
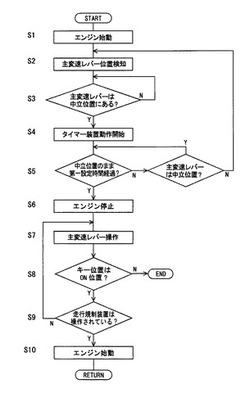
【課題】苗移植機においては、苗つぎ作業等の走行を停止して行う作業の頻度が高く、作業者が苗等の補充作業を行うときエンジンをアイドリング状態のままにしていると、燃費の向上が図れず環境適応性を悪化させる問題があった。また、作業者がエンジンを切ることも可能であるが、作業者の操作が増えると共に確実性に欠けるという問題があった。
【解決手段】主変速レバー(203)等からの信号を受けエンジン状態を制御する制御装置を設けた苗移植機であって、その制御装置が、前記主変速レバー(203)を中立位置に位置する時間が前記タイマー装置の第一設定時間を経過した場合に、前記エンジン(20)を停止する制御構成を有することを特徴とする苗移植機により上記問題を解決した。
(もっと読む)
移植機

【課題】移植作業をする際に、移植部操作手段により植付クラッチを接続操作すると、走行部の走行速度が抑制されて、苗移植精度を良好に確保することができる移植機を提供すること。
【解決手段】走行変速手段を備えた走行部を走行させながら、移植変速手段を備えた移植部により圃場に苗を移植可能とした移植機であって、走行変速手段に変速制御機構を介して増減速操作手段を連動連結する一方、移植変速手段に設けた植付クラッチに移植部操作手段を連動連結し、移植部操作手段による植付クラッチの接続操作に変速制御機構の増速動作範囲を規制する規制手段の規制動作を連動させた。
(もっと読む)
乗用移植機
【課題】植付作業機を傾斜した地面に下ろす際に、植付作業機や強制傾斜機構の破損を防止する。
【解決手段】走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備える。
(もっと読む)
田植機
【課題】 本発明の課題は、植付部を適正に稼動することができる田植機を提供することにある。
【解決手段】 転向車輪と後輪とを備えて旋回走行可能な水田作業車の旋回動作信号と、同水田作業車に昇降可能に搭載されて均平用のフロートを備えた植付部の高さ位置信号とを受け、機体の旋回動作と対応して植付部の昇降調節と稼動を制御する制御処理部を備える田植機において、後輪を駆動する後輪伝動部(16)には、後輪車軸(3a)へ減速伝動する減速伝動部と、該減速伝動部よりも伝動上手側に設けた走行距離を算出するための回転センサ(16s)とを備え、旋回のためのハンドル操作又は植付切操作で走行の距離カウントを開始し、走行の距離カウントが所定の旋回走行距離に到達したときに植付部を稼動制御する制御装置を設けた。
(もっと読む)
苗移植機
【課題】線引きマーカを自動下降させるとともに、それを簡単な構成で実現出来る苗移植機を提供すること。
【解決手段】苗を圃場に植え付ける植え付け装置7と、圃場に直進用の目印を形成する線引きマーカ1と、植え付け装置7を上昇、下降、又は植え付け入・切りさせる植え付け昇降レバー33と、走行輪の回転数を検出する回転センサ182と、植え付け昇降レバー33を自動的に移動させるモータ99と、線引きマーカ1とモータ99の間に設けられ、モータ99の駆動により線引きマーカ1を待機位置から使用位置へと移動させる移動機構32と、走行回転検知部182の出力に基づいて、旋回終了時にモータ99を動作させることで、植え付け装置7を下降させる制御部330を備え、モータ99の動作により、移動機構によって線引きマーカ1が使用位置へと移動される、苗移植機である。
(もっと読む)
乗用田植機
【課題】植付部を下降させた場合だけ植付クラッチを切断動作させて植付爪を所定位置停止動作させることで、植付爪の変形等や苗詰まりを回避すること。
【解決手段】走行部に設けた動力源に植付クラッチを介して植付部に設けた植付爪を連動連結して、植付クラッチの切断動作に植付爪が所定の植付作動位置で停止する所定位置停止動作を連動させた乗用田植機であって、前記動力源と植付クラッチとを連動連結する伝動機構に伝動クラッチを設けて、植付部の上昇操作に伝動クラッチの切断動作を連動させるとともに、植付部の下降操作に伝動クラッチの接続動作を連動させ、所定位置停止動作までに植付駆動の切断を制御可能とした。
(もっと読む)
作業車両
【課題】
旋回時に駆動力の切れる走行装置に駆動力を供給する状態とする操作装置を設け、旋回時の走行が停滞することのない作業車両を提供する。
【解決手段】
走行装置11,11と伝動切替装置300を走行斜体2に左右一対設け、走行車体2を左右方向に旋回操作する操作部材34を設け、操作部材34の操作に連動して旋回内側の伝動切替装置300を「切」側に作動させる旋回連動機構307を設け、旋回連動機構307と切替部材305を連結する連動操作機構317を設け、伝動操作部材303を設け、伝動操作部材303と切替部材305を連繋操作部材304で連結して構成する。
(もっと読む)
苗移植機
【課題】
畦越走行時等に後側の苗植装置が上昇位置にあると、重心位置が高く、車体の前端部が上昇して、畦越走行姿勢が不安定となる。
【解決手段】
乗用走行車体5の後側に、リフトシリンダ6によって昇降のリフトリンク7を介して苗植装置8を連結し、前記リフトシリンダ6によって苗植装置8を下降させて底部のフロート9を接地滑走させながら均平土壌面に植付装置10により苗タンク11から繰出される苗を分離挿植すると共に、車体5の前端部にはこの車体5操作作用のグリップハンドル12を設けた苗植機において、前記グリップハンドル12を倒し操作することによって、苗植装置8を適宜位置まで下降させる構成とする。
(もっと読む)
苗移植機
【課題】旋回後に苗の植付開始位置を適切な位置に揃えることができる苗移植機を提供すること。
【解決手段】苗移植機に、旋回時又は後進時には植付部52を自動的に上昇させ、前進時には植付部52を下降させる自動昇降機構Aと、植付部52の昇降動作及び苗植付動作の入切動作を行う植付昇降レバー33と、植付部52を上昇させた状態で後進させると後輪回転センサ182により検知される後進時の回転数が予め設定された基準回転数を上回ると自動昇降機構Aを作動させない制御構成とする制御装置200を設けたので、旋回後に植付部52を下降させて苗の植え付けを再開する際に、作業者は植付昇降レバー33を手動操作して植付部52を下降させることができるので、旋回後の苗の植付開始位置を適切な位置に揃えられ、苗の植付精度が従来より向上する。
(もっと読む)
苗移植機
【課題】苗移植機による植え付け開始時において、施肥ムラが生じないようにする。
【解決手段】走行車体に設けられ、圃場に苗を植え付ける植付装置14と、苗の植え付け位置へ肥料を供給する施肥装置16と、走行操作レバー38の操作に応じて走行車体の進行方向および速度を変更する無段式変速装置33と、無段式変速装置を制御するサーボアクチュエーターと、走行操作レバーの操作に応じて施肥装置およびサーボアクチュエーターを制御する制御部50とを備える。制御部は、走行操作レバーが前進に操作されると、施肥装置を駆動し、所定時間経過後に、サーボアクチュエーターを駆動して車輪10、11および植付装置を駆動させるように制御する。
(もっと読む)
作業車両
【課題】作業者に負担を掛けないで、ブレーキペダルの連結と非連結を容易に切り替え可能であり、作業条件に合わせた操作が行える作業車両の提供である。
【解決手段】エンジンと前輪と後輪と苗植付部と左右のサイドクラッチと左右のサイドブレーキと左右のサイドクラッチ及び左右のサイドブレーキを操作可能な左右のブレーキペダル130と副変速レバーと副変速レバーセンサとを設けた走行車両に、左右のブレーキペダル130を連結又は非連結に切り替える切替装置140と、副変速レバーが高速時に切替装置140を作動して左右のブレーキペダル130を連結させる制御装置とを設ける。高速の直進走行時には、左右のブレーキペダル130が連結するため、停止操作が容易に行える。一方、低速時には、左右のブレーキペダル130が連結しないため、作業条件に合わせた操作が行える。
(もっと読む)
田植機
【課題】植付部の昇降制御の追従性を向上させた田植機を提供する。
【解決手段】田植機は、植付部と、フロートセンサと、制御部と、を備えている。植付部は、地面に接触可能なフロートを備える。フロートセンサは、フロートの揺動角を検出する。制御部は、フロートセンサの出力値の微分値を制御量としたPID制御(ステップS103)により、植付部を昇降制御する。また制御部は、フロートセンサが検出したフロートの位置と、前記フロートの位置の目標値と、の差をフロートセンサの検出値に基づいて修正する(ステップS104)。
(もっと読む)
田植機
【課題】植付クラッチとロータクラッチを任意のタイミングで入切できる田植機を提供する。
【解決手段】植付クラッチ19bは、入切作動させる植付側操作アーム64と連動連結され、ロータクラッチ17cは、入切作動させるロータ側操作アーム65と連動連結され、前記植付側操作アーム64と前記ロータ側操作アーム65は、制御カム63に当接され、該制御カム63は、アクチュエータとなるクラッチモータ66により回転駆動され、該制御カム63の回転により前記植付クラッチ19bと前記ロータクラッチ17cをそれぞれ入切可能に構成されるものである。
(もっと読む)
田植機
【課題】田植機において、ピッチング角等に基づく補正を適切に行い、良好な昇降制御性能を得ることができる構成を提供する。
【解決手段】制御部は、フロートの揺動角の検出値を、ピッチング角に基づいて補正して(ステップS106)、植付部を昇降制御するように構成されている。そして制御部は、ピッチング角の変化速度又は加速度が大きい場合には、前記補正を行わない。即ち、車体が急激なピッチング挙動を示すときには、ピッチング角による補正の影響を小さくすることにより、意図しない昇降制御が行われてしまうことを防止し、植付部の不必要な高さ変動を抑えることができる。
(もっと読む)
作業車両
【課題】土質の柔らかい圃場での旋回走行が円滑に行える作業車両を提供すること。
【解決手段】前輪3と後輪4を有する機体2と、前輪へのデファレンシャル機構を切り替えるデフロック機構170と、デフロック機構170を制御するデフロック制御機構200aと、後輪の上下位置を変更するための圧縮スプリングと後輪伝動ケース111と回動軸部112等とを備えた苗移植装置1であって、圧縮スプリング及び後輪伝動ケース111等を作動させる後輪車高調整用シリンダーモーター110と、デフロック機構170の作動を検出する前輪デフロックペダル操作検出スイッチ150と、そのスイッチ150が前記作動を検出した場合、後輪車高調整用シリンダーモーター110を作動させて機体2の車高を変更する車高変更制御機構200bとを備えた作業車両である。
(もっと読む)
苗移植機
【課題】圃場の浅い深いに拘わらず、常に直進の指標となるマークを圃場に引くことができる線引きマーカ1を備えた苗移植機を提供すること。
【解決手段】車体5の後側に複数条分の苗を積載する苗タンク20と植付装置7と苗タンク昇降用のリンク機構6を備え、圃場に植え付けた苗の上方に位置して直進の目安とするサイドマーカ57と圃場面に接触して直進の目安となる線を引く線引きマーカ1と任意の植付装置7の駆動を入切する部分条クラッチの入切を行う部分条クラッチレバーを設け、 圃場の深浅に合わせてサイドマーカ57の上下位置を自動調節するサイドマーカ自動調節機構と部分条クラッチレバーの操作に合わせて線引きマーカ1の左右位置が自動的に変更される線引きマーカ位置自動変更装置を備えた苗移植機である。
(もっと読む)
田植機
【課題】従来より、エンジン駆動の田植機において、植付操作を行うマーカ選択レバー等は、大きな設置空間が必要な機械的リンク機構を介して被操作部に連動連結されるため、マーカ選択レバー等をボンネットに設けると、該ボンネット内のエンジンルームの空きスペースが小さくなり、設計自由度低下による製造コストの増加やメンテナンス性の悪化を招く、という問題があった。
【解決手段】エンジン6駆動の田植機1において、該田植機1の被操作部である植付部3、植付クラッチ33、及び線引きマーカ40L・40Rを電気制御するコントローラ46に電気信号を送受信するクロスレバー52を、前記エンジン6を収容するエンジンルーム89の直上に配置した。
(もっと読む)
作業車両
【課題】作業性の高い降車操作具を備えた作業車両を提供する。
【解決手段】ロックレバー45が降車操作系とクラッチブレーキ操作系とを連繋させる連繋位置になると、ロックプレート76による主変速レバー71とレバープレート75との連結が解除され、主変速レバー71がレバープレート75の凹部75bの幅の範囲内で回動可能となる。これにより、降車操作具によって、機体が走行される際の速度が、主変速レバー71の規制された操作範囲内で設定される。
(もっと読む)
苗移植機
【課題】
走行操作レバーに苗植装置の昇降操作装置を取り付け、走行速度や苗植装置の昇降を片手で操作できる苗移植機において、走行操作レバーを操作する際に誤って昇降操作装置に触れても、苗植装置が作動しない苗移植機を提供する。
【解決手段】
圃場面に接触するフロート1と、積載したマット苗を苗取口2に送り出す苗タンク3と、苗取口2から植付爪4で苗を保持して植え付ける植付装置5で苗植装置6を構成し、苗植装置6を走行車体7の後部に昇降可能に取り付けた苗移植機において、走行車体7の植付走行操作を行う走行操作レバー10の操作把持部に、苗植装置6を昇降する昇降操作具11を設け、走行操作レバー10を走行位置に操作、または変速操作して苗植機が走行中の状態にあるときは、昇降操作具11が操作されてから昇降作動までの間の連続操作時間の操作を無効とする所定の牽制時間Tを設定する。
(もっと読む)
移動農機
【課題】移動農機である乗用田植機による圃場での植付作業において、乗用田植機で畔際を後進する際に、乗用田植機の作業機である植付作業機と畔とが接触することを防止する移動農機を提供する。
【解決手段】乗用田植機1の後進操作の検出時に、後進操作前に操舵角センサより検出されたステアリングハンドルの操舵角が旋回領域に位置する場合には(S601)、植付作業機の高さ位置が設定されている場合であっても、植付作業機を第1位置(H1)にまで上昇させる(S608)。
(もっと読む)
1 - 20 / 147
[ Back to top ]